基于非相干式判别的自适应频率跟踪方法与流程
本发明属于通讯领域,具体涉及基于非相干式判别的自适应频率跟踪方法。
背景技术:
1、接收机内部通过锁频环复制一个包含多普勒频移在内的载波频率,使其尽可能地的与实际接收到的信号载波频率保持一致,因而锁频环首先需要鉴别出接收载波与复制载波之间的频率差异,然后相应的去调节载波数控振荡器所输出的复制载波频率,经过连续多次的反馈与循环之后,最终是两者的频率达到动态一致。
2、传统的锁频环fll在snr比较小或者有其干扰的情况下,其频率捕获范围往往不能满足捕获条件,为此,传统的频率牵引方法是一种基于并行的牵引方法。这种方法的缺点主要表现为耗费资源大,牵引的频差越大,则所需的资源越多。而且传统的鉴频器耗费资源很大。
技术实现思路
1、本发明的目的在于克服上述不足,提供基于非相干式判别的自适应频率跟踪方法,能够更好的进行信号频率搜索与跟踪。
2、为了达到上述目的,本发明采用如下技术方案:
3、基于非相干式判别的自适应频率跟踪方法,包括以下步骤:
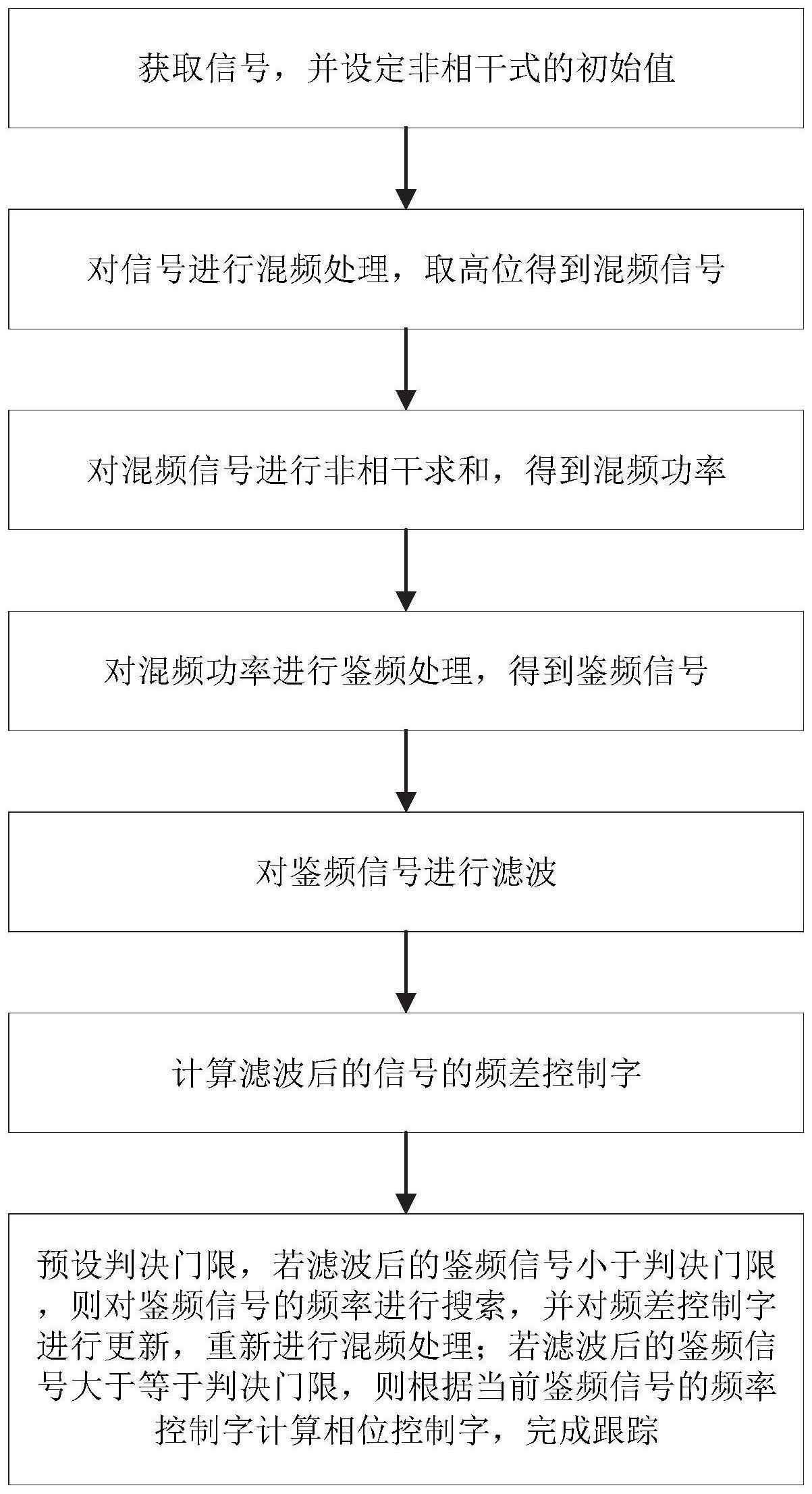
4、获取信号,并设定非相干式的初始值;
5、对信号进行混频处理,取高位得到混频信号;
6、对混频信号进行非相干求和,得到混频功率;
7、对混频功率进行鉴频处理,得到鉴频信号;
8、对鉴频信号进行滤波;
9、计算滤波后的信号的频差控制字;
10、预设判决门限,若滤波后的鉴频信号小于判决门限,则对鉴频信号的频率进行搜索,并对频差控制字进行更新,重新进行混频处理;若滤波后的鉴频信号大于等于判决门限,则根据当前鉴频信号的频率控制字计算相位控制字,完成跟踪。
11、本发明进一步的改进在于,获取信号,信号的表达式为:
12、si(n)=cos(2πfc/fsn)
13、其中,si(n)为信号,fc为数字中频,fs为采样频率,
14、本发明进一步的改进在于,设定非相干式的初始值,具体包括:
15、设定非相干点数次序编号m的初始值为1,m为正整数;
16、设定初始搜索计数器cou的初始值为0;
17、设定同向支路的相干累值iprev和正交支路的相干累值qprev的初始值为0;
18、设定锁住状态tra的初始值为0,其中,0表示未进入跟踪状态,1表示进入跟踪状态;
19、设定累加频差fsu的初始值为0;
20、设定相位控制字p的初始值为0。
21、本发明进一步的改进在于,对信号进行混频处理,取高位得到混频信号的步骤中,具体包括:
22、混频原始信号为:
23、s(m,n′)=si(n′+nco(m-1))
24、其中,s(m,n′)为混频原始信号,m为非相干点数次序编号,n′=0,1,2,...,nco-1,nco为相干积累点数;
25、将频率控制字k、数控振荡器输出信号位宽m,相位控制字p作为输入参数,则
26、[si(n),sq(n)]=nco(k,m,nco,p)
27、输出的i路信号si(n′)和q路信号sq(n′)表示为:
28、
29、
30、其中,lnco为输出正余弦信号的位宽,fnco为数控振荡器输出正余弦信号频率;
31、将混频原始信号s(m,n′)分别与i路信号si(n′)和q路信号sq(n′)进行混频,取高位后得到混频后的i路信号s′i(n′)和q路信号s′q(n′),表示为:
32、
33、
34、本发明进一步的改进在于,对混频信号进行非相干求和,得到混频功率的步骤中,具体包括:
35、对混频后的i路信号s′i(n′)和q路信号s′q(n′)进行相干积分求和,得到:
36、
37、
38、其中,nco为数控振荡器输出信号长度;
39、混频功率p1的计算方法如下:
40、p1=i2+q2。
41、本发明进一步的改进在于,对混频功率进行鉴频处理,得到鉴频信号的步骤中,具体包括:
42、设定p′=p1/nsfc,nsfc为缩放因子,p″=2k,k满足2k-1≤p′≤2k;
43、则鉴频信号f_ad为:
44、
45、其中,qprev为正交支路的相干累加值,iprev为同向支路的相干累加值,i为同相支路累加值。
46、本发明进一步的改进在于,对鉴频信号进行滤波的步骤中,具体包括:
47、δf=c1×f_ad+tmp
48、tmp=c2×f_ad+tmp
49、其中,δf为滤波后的鉴频信号,c1为环路滤波器第一系数,f_ad为鉴频信号,tmp为环路滤波器后项值,c2为环路滤波器第二系数。
50、本发明进一步的改进在于,计算滤波后的信号的频差控制字δk的具体方法如下:
51、δk=δf2l/fs
52、其中,l为数控振荡器的字长,fs为信号的采样频率。
53、本发明进一步的改进在于,预设判决门限t,t>0,若滤波后的鉴频信号p′小于判决门限t,则对鉴频信号的频率进行搜索,并对频差控制字进行更新,重新进行混频处理的步骤中,具体包括:
54、如果p′<t则开始进行频率搜索进行频率控制字k更新,表示如下:
55、
56、tra=0
57、cou′=cou+1
58、其中,k0为初始频率控制字,cou为初始搜索计数器,δk′为频差控制字,锁住状态为未进入跟踪状态,始搜索计数器自加一。
59、本发明进一步的改进在于,预设判决门限t,t>0,若滤波后的鉴频信号大于等于判决门限,则根据当前鉴频信号的频率控制字计算相位控制字,完成跟踪的步骤中,具体包括:
60、若锁住状态为未进入跟踪状态,则:
61、
62、k=k0+δk
63、cou=0
64、其中,k0为初始频率控制字,cou为初始搜索计数器,δk′为频差控制字,δk为频差控制字;
65、相位控制字p的计算方法如下:
66、
67、
68、为相位增量,nco为数控振荡器输出信号长度,lp为相位控制字的位宽。
69、与现有技术相比,本发明具有如下有益效果:
70、本发明是在原有的锁频环的基础上进行改进而得到的,对输入的数字信号进行混频、相干积分、求功率、鉴频和环路滤波,产生率控制字与相位控制字,而后进行跟踪鉴别,从而形成一个闭环过程。如果没在捕获范围就进行重新选择频率控制字,最后将频率控制字与输入给数控振荡器函数作为输入,如此不断循环,不满足条件则重新进行判断、选择。直到进入稳定的频率跟踪为止。本发明的频率牵引方式采用基于非相干判决的频率牵引方式,能够更好的进行信号频率搜索与跟踪,并且突破了牵引范围越广,所消耗资源约多的弊端,采用自动搜索频点的方式,直到搜索捕获范围的频点为止。本发明耗费资源少,比传统技术稳定性好,能应用于更加复杂的环境。
- 还没有人留言评论。精彩留言会获得点赞!