用于协作机器人视觉控制器的电路板套件及视觉控制器的制作方法
本发明属于协作机器人视觉控制,具体涉及一种用于协作机器人视觉控制器的电路板套件以及包含该电路板套件的协作机器人视觉控制器。
背景技术:
1、协作机器人在智能制造产业中,应用越来越广泛,例如3c电子、半导体、医疗等行业。先进的机器人控制系统,需要结合ai视觉实现,例如识别6d抓取姿态完成分拣,分辨图像特征完成缺陷检测,对物体进行三维重建实现打磨焊接。
2、现有技术中,通常采用以下两种方式来实现协作机器人的视觉控制。一种方式是将2d或3d相机放置在机器人作业区域,使用数据线将摄像头和服务器连接,图像先发送至服务器,再进一步计算处理,将计算结果发送给机器人。这种方式设备冗余成本较高,存在系统延迟且可靠性低。另外一种方式是,将摄像头和处理器集成为一个模组,因受体积的限制,多选用rgb摄像头和性能较低的cpu芯片,这种类型的边缘计算设备无法获取3d图像,无法处理大型的神经网络。
技术实现思路
1、本发明是为了解决上述技术问题而进行的,目的在于提供一种用于协作机器人视觉控制器的电路板套件以及包含该电路板套件的协作机器人视觉控制器。
2、为了实现上述目的,本发明采用了如下技术方案:
3、<结构一>
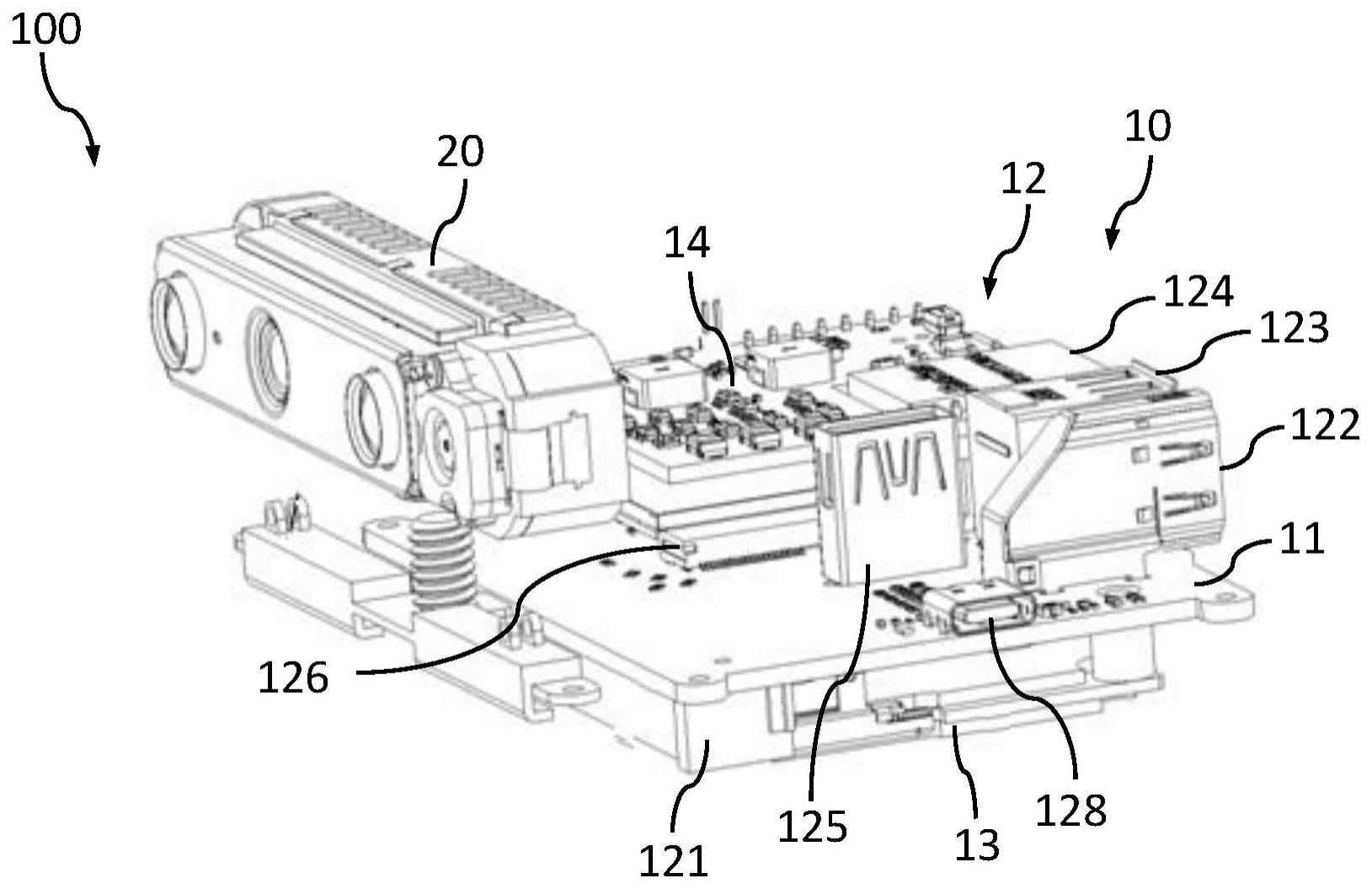
4、本发明提供了一种用于协作机器人视觉控制器的电路板套件,具有这样的特征,包括:呈上下间隔平行布置的嵌入式载板和嵌入式核心板;以及设置在嵌入式载板上的数据接口部,其中,嵌入式核心板为jetson tx2 nx开发板、jetson nano开发部以及jetsonxaiver nx开发板中的任意一种,数据接口部具有用于安装嵌入式核心板的板至板连接器、用于连接显示器的hmdi接口、用于连接键盘和鼠标的两个usb2.0接口、用于连接有线网络的千兆网接口、以及用于连接相机模组的usb3.0接口,板至板连接器位于嵌入式载板背面的一个侧部的边缘处,并且与jetson tx2 nx开发板、jetson nano开发部以及jetsonxaiver nx开发板均相适配,hmdi接口、usb2.0接口以及千兆网接口分别位于嵌入式载板正面上远离板至板连接器的侧部的边缘处,均为侧面水平插拔式布置,usb3.0接口位于嵌入式载板正面的中央部位靠近usb2.0接口的位置处,为顶部垂直插拔式布置。
5、在本发明提供的用于协作机器人视觉控制器的电路板套件中,还可以具有这样的特征:还包括:固定硬盘,其中,数据接口部还包括设置在嵌入式载板正面的中央部位的m2连接器,固定硬盘安装在m2连接器上。
6、在本发明提供的用于协作机器人视觉控制器的电路板套件中,还可以具有这样的特征:还包括:无线网卡,其中,数据接口部还包括设置在嵌入式载板背面的中央部位的m2连接器,无线网卡安装在m2连接器上。
7、在本发明提供的用于协作机器人视觉控制器的电路板套件中,还可以具有这样的特征:其中,数据接口部还包括usb type-c接口,该usb type-c接口设置在嵌入式载板正面的端部上。
8、在本发明提供的用于协作机器人视觉控制器的电路板套件中,还可以具有这样的特征:其中,板至板连接器为ddr4-sodimm连接器。
9、在本发明提供的用于协作机器人视觉控制器的电路板套件中,还可以具有这样的特征:其中,两个usb2.0接口为上下布置。
10、在本发明提供的用于协作机器人视觉控制器的电路板套件中,还可以具有这样的特征:其中,嵌入式载板为长方形,尺寸为80mm×60mm。
11、在本发明提供的用于协作机器人视觉控制器的电路板套件中,还可以具有这样的特征:其中,嵌入式核心板为长方形,尺寸为70mm×45mm。
12、<结构二>
13、本发明还提供了一种协作机器人视觉控制器,具有这样的特征,包括:<方案一>的用于协作机器人视觉控制器的电路板套件;以及相机模组,安装在嵌入式核心板正面上与板至板连接器相对应的侧部的边缘处,并且与usb3.0接口相连接。
14、发明作用与效果
15、根据本发明所涉及的用于协作机器人视觉控制器的电路板套件以及包含该电路板套件的协作机器人视觉控制器,因为具有上下间隔平行布置的嵌入式载板和嵌入式核心板,嵌入式载板的背面上设有板至板连接器,正面上设有能够连接显示器的hmdi接口、能够连接键盘和鼠标的两个usb2.0接口、能够连接有线网络的千兆网接口能够连接相机模组的usb3.0接口,,嵌入式核心板安装在设置于嵌入式载板背面的板至板连接器上,嵌入式核心板为jetson tx2 nx开发板、jetson nano开发部以及jetson xaiver nx开发板中的任意一种,板至板连接器与jetson tx2 nx开发板、jetson nano开发部以及jetson xaiver nx开发板均相适配,所以,一方面,本发明能够根据机器人视觉控制的算法规模和难道灵活选用jetson开发板,以避免算力浪费,降低系统成本;另一方面,本发明使用紧凑型双层结构,尽可能利用控制器外壳内的空间,减小了控制器的整体体积。
技术特征:
1.一种用于协作机器人视觉控制器的电路板套件,其特征在于,包括:
2.根据权利要求1所述的用于协作机器人视觉控制器的电路板套件,其特征在于,还包括:
3.根据权利要求1所述的用于协作机器人视觉控制器的电路板套件,其特征在于,还包括:
4.根据权利要求1所述的用于协作机器人视觉控制器的电路板套件,其特征在于:
5.根据权利要求1所述的用于协作机器人视觉控制器的电路板套件,其特征在于:
6.根据权利要求1所述的用于协作机器人视觉控制器的电路板套件,其特征在于:
7.根据权利要求1所述的用于协作机器人视觉控制器的电路板套件,其特征在于:
8.根据权利要求1所述的用于协作机器人视觉控制器的电路板套件,其特征在于:
9.一种协作机器人视觉控制器,其特征在于,包括:
技术总结
本发明提供一种用于协作机器人视觉控制器的电路板套件及视觉控制器。该电路板套件包括:呈上下间隔平行布置的嵌入式载板和嵌入式核心板;以及设置在嵌入式载板上的数据接口部,其中,嵌入式核心板为Jetson TX2NX开发板、Jetson nano开发部以及Jetson Xaiver NX开发板中的任意一种,数据接口部具有板至板连接器、HMDI接口、两个USB2.0接口、千兆网接口以及USB3.0接口,板至板连接器位于嵌入式载板背面侧部的边缘处,与上述三种Jetson开发板均相适配,HMDI接口、USB2.0接口以及千兆网接口分别位于嵌入式载板正面侧部的边缘处,均为侧面水平插拔式布置,USB3.0接口位于嵌入式载板正面的中央部位,为顶部垂直插拔式布置。
技术研发人员:俞宏洋,李双圻,周菲,王记文,余健,董鑫,郁张皓,朱天启,潘宇,魏亚飞
受保护的技术使用者:上海一琉机器人科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!