仿生热管理方法与流程
本申请涉及机器人热管理,特别是涉及一种仿生热管理方法。
背景技术:
1、随着科技进步,各类传感器应运而生,也因此为机器人的大规模应用创造了先决条件。可以理解的是,机器人要完成各种复杂的动作,离不开电源的供能和电机的驱动,通常,机器人拥有多个关节及对应的驱动电机。并且,机器人要持久完成高难度复杂的运动就需要有足够的能量,因而机器人上的电池功率密度越来越大,同时与驱动电机关联的igbt模块(绝缘栅双极晶体管)的功率密度也在不断提高,因此,电池和igbt模块的散热尤为关键。现在机器人的散热主要依赖于压缩机制冷,但是,压缩机频繁的启动会产生较大的噪声,并且,会导致机器人的功耗过大,不利于机器人的续航。
技术实现思路
1、基于此,有必要提供一种仿生热管理方法,以解决机器人在散热过程中噪声较大且功耗过大的问题。
2、本申请提供的仿生热管理方法通过仿生热管理系统对机器人进行换热,仿生热管理系统包括热管换热器、压缩机、冷凝器、负压蒸发装置和储液室,igbt模块和电池分别通过对应的热管换热器,热管换热器通过管路依次连通压缩机和冷凝器,负压蒸发装置设置于热管换热器的出液端,负压蒸发装置能够使得热管换热器出液端的部分或者全部工质气化并排至外部空间,储液室连通于热管换热器的进液端或者出液端。
3、仿生热管理方法包括以下步骤:当外部空间的温度小于或等于第一预设温度,且igbt模块的发热量和电池的发热量均小于第一预设发热量时,压缩机处于关闭状态,负压蒸发装置将热管换热器出液端的工质气化并排入外部空间;当仿生热管理系统内工质的量小于或等于第一预设量时,储液室向管路内输送工质;当外部空间温度大于第一预设温度且小于或等于第二预设温度,或者,igbt模块和电池中一者的发热量大于第一预设发热量且小于或等于第二预设发热量时,压缩机处于启动状态,以对igbt模块和电池进行散热,且负压蒸发装置处于关闭状态;当外部空间温度大于第二预设温度,或者,igbt模块和电池中一者的发热量大于第二预设发热量时,压缩机和负压蒸发装置均处于启动状态。
4、在其中一个实施例中,负压蒸发装置包括壳体、活塞、驱动元件、第一控制阀和第二控制阀,壳体设有气化腔,气化腔通过第一控制阀连通热管换热器的出液端,气化腔通过第二控制阀连通外部空间,活塞可活动地设于气化腔内,且驱动元件连接于活塞的有杆端,以带动活塞在气化腔内移动。仿生热管理方法还包括以下步骤:打开第一控制阀,并关断第二控制阀,驱动元件带动活塞朝向远离第一控制阀的方向移动,以使热管换热器出液端的工质通过第一控制阀进入气化腔;当进入气化腔的工质的量大于或等于第二预设量时,关闭第一控制阀,驱动元件带动活塞继续朝向远离第一控制阀的方向移动,以使气化腔内的液态工质气化为气态工质;打开第二控制阀,驱动元件带动活塞朝向靠近第一控制阀的方向移动,以使气化腔内的气态工质通过第二控制阀进入外部空间。
5、在其中一个实施例中,负压蒸发装置还包括多孔介质层,多孔介质层设于气化腔连通第一控制阀的一端,以使第一控制阀能够通过多孔介质层连通气化腔。
6、在其中一个实施例中,第二控制阀连通于气化腔未设置多孔介质层的一端,负压蒸发装置还包括第三控制阀和第四控制阀,多孔介质层为弹性材质,多孔介质层能够通过第三控制阀连通气化腔,且第三控制阀与气化腔的内壁活动密封配合,第四控制阀设于多孔介质层远离第三控制阀的一侧,多孔介质层能够通过第四控制阀连通外部空间。仿生热管理方法还包括以下步骤:关断第一控制阀、第二控制阀和第三控制阀,打开第四控制阀,利用驱动元件驱动活塞挤压多孔介质层,以完全排出多孔介质层内的不凝气体;打开第一控制阀,并关断第二控制阀、第三控制阀和第四控制阀,驱动元件带动活塞朝向远离第一控制阀的方向移动,以使热管换热器出液端的工质通过第一控制阀进入多孔介质层,直至多孔介质层部分或者全部回弹;关断第一控制阀、第二控制阀和第四控制阀,并打开第三控制阀,驱动元件带动活塞继续朝向远离第一控制阀的方向移动,以使多孔介质内的液态工质气化为气态工质并进入气化腔;打开第二控制阀,并关断第一控制阀、第三控制阀和第四控制阀,驱动元件带动活塞朝向靠近第一控制阀的方向移动,以使气化腔内的气态工质通过第二控制阀进入外部空间。
7、在其中一个实施例中,第三控制阀包括活动密封板和阀体部,第三控制阀通过活动密封板与气化腔的内壁活动密封配合,活动密封板设有通孔,阀体部设置于通孔处。
8、在其中一个实施例中,第一控制阀、第二控制阀、第三控制阀和第四控制阀均为单向阀。
9、在其中一个实施例中,多孔介质层为海绵材料、碳材料、泡沫材料、水凝胶、多孔陶瓷、多孔金属材料或者多孔聚合物材料。
10、在其中一个实施例中,仿生热管理系统包括并联设置的第一换热回路、第二换热回路和第三换热回路,冷凝器分别通过第一换热回路、第二换热回路和第三换热回路连通压缩机。
11、在其中一个实施例中,仿生热管理系统还包括旁通管路,压缩机能够通过旁通管路连通冷凝器,且旁通管路设有截止阀。
12、在其中一个实施例中,储液室包括第一室、第二室和第三室,第一室设于机器人的头部,第二室设于机器人的胸腔,第三室设于机器人的腹腔。
13、与现有技术相比,本申请提供的仿生热管理方法,通过设置负压蒸发装置和储液室,则机器人在散热时,只需要在特定温度条件下启动压缩机对igbt模块和电池进行散热,也即,无须频繁启动压缩机,因此,大大降低了机器人在散热过程中的噪声总量并有效降低了机器人的功耗。并且,通过负压蒸发装置和压缩机的配合工作,大大提高了仿生热管理系统的散热效率。
14、进一步地,由于负压蒸发装置能够将液态工质转化为气态工质排出机器人,此过程,相当于人体的汗液蒸发过程,甚至比汗液蒸发过程更加环保,主要在于,负压蒸发装置在排气过程中,不会有液态工质流淌至机器人表面或者地面,从而不会导致机器人表面或者地面被液态工质污染。
15、更进一步地,可以理解的是,由于压缩机也具备制热的功能,因此,通过设置仿生热管理系统,能够使机器人整体处于恒温状态,有利于机器人和人体进行交互时,人体的温度感受舒适度。
技术特征:
1.一种仿生热管理方法,其特征在于,通过仿生热管理系统对机器人(1000)进行换热,所述仿生热管理系统包括热管换热器(100)、压缩机(200)、冷凝器(300)、负压蒸发装置和储液室,igbt模块(600)和电池(700)分别通过对应的所述热管换热器(100)进行换热,所述热管换热器(100)通过管路依次连通所述压缩机(200)和所述冷凝器(300),所述负压蒸发装置设置于所述热管换热器(100)的出液端,所述负压蒸发装置能够使得所述热管换热器(100)出液端的部分或者全部工质气化并排至外部空间,所述储液室连通于所述热管换热器(100)的进液端或者出液端;
2.根据权利要求1所述的仿生热管理方法,其特征在于,所述负压蒸发装置包括壳体(410)、活塞(420)、驱动元件(430)、第一控制阀(440)和第二控制阀(450),所述壳体(410)设有气化腔(411),所述气化腔(411)通过所述第一控制阀(440)连通所述热管换热器(100)的出液端,所述气化腔(411)通过所述第二控制阀(450)连通外部空间,所述活塞(420)可活动地设于所述气化腔(411)内,且所述驱动元件(430)连接于所述活塞(420)的有杆端,以带动所述活塞(420)在所述气化腔(411)内移动;
3.根据权利要求2所述的仿生热管理方法,其特征在于,所述负压蒸发装置还包括多孔介质层(480),所述多孔介质层(480)设于所述气化腔(411)连通所述第一控制阀(440)的一端,以使所述第一控制阀(440)能够通过所述多孔介质层(480)连通所述气化腔(411)。
4.根据权利要求3所述的仿生热管理方法,其特征在于,所述第二控制阀(450)连通于所述气化腔(411)未设置所述多孔介质层(480)的一端,所述负压蒸发装置还包括第三控制阀(460)和第四控制阀(470),所述多孔介质层(480)为弹性材质,所述多孔介质层(480)能够通过所述第三控制阀(460)连通所述气化腔(411),且所述第三控制阀(460)与所述气化腔(411)的内壁活动密封配合,所述第四控制阀(470)设于所述多孔介质层(480)远离所述第三控制阀(460)的一侧,所述多孔介质层(480)能够通过所述第四控制阀(470)连通外部空间;
5.根据权利要求4所述的仿生热管理方法,其特征在于,所述第三控制阀(460)包括活动密封板(461)和阀体部(462),所述第三控制阀(460)通过所述活动密封板(461)与所述气化腔(411)的内壁活动密封配合,所述活动密封板(461)设有通孔,所述阀体部(462)设置于所述通孔处。
6.根据权利要求4所述的仿生热管理方法,其特征在于,所述第一控制阀(440)、所述第二控制阀(450)、所述第三控制阀(460)和所述第四控制阀(470)均为单向阀。
7.根据权利要求3所述的仿生热管理方法,其特征在于,所述多孔介质层(480)为海绵材料、碳材料、泡沫材料、水凝胶、多孔陶瓷、多孔金属材料或者多孔聚合物材料。
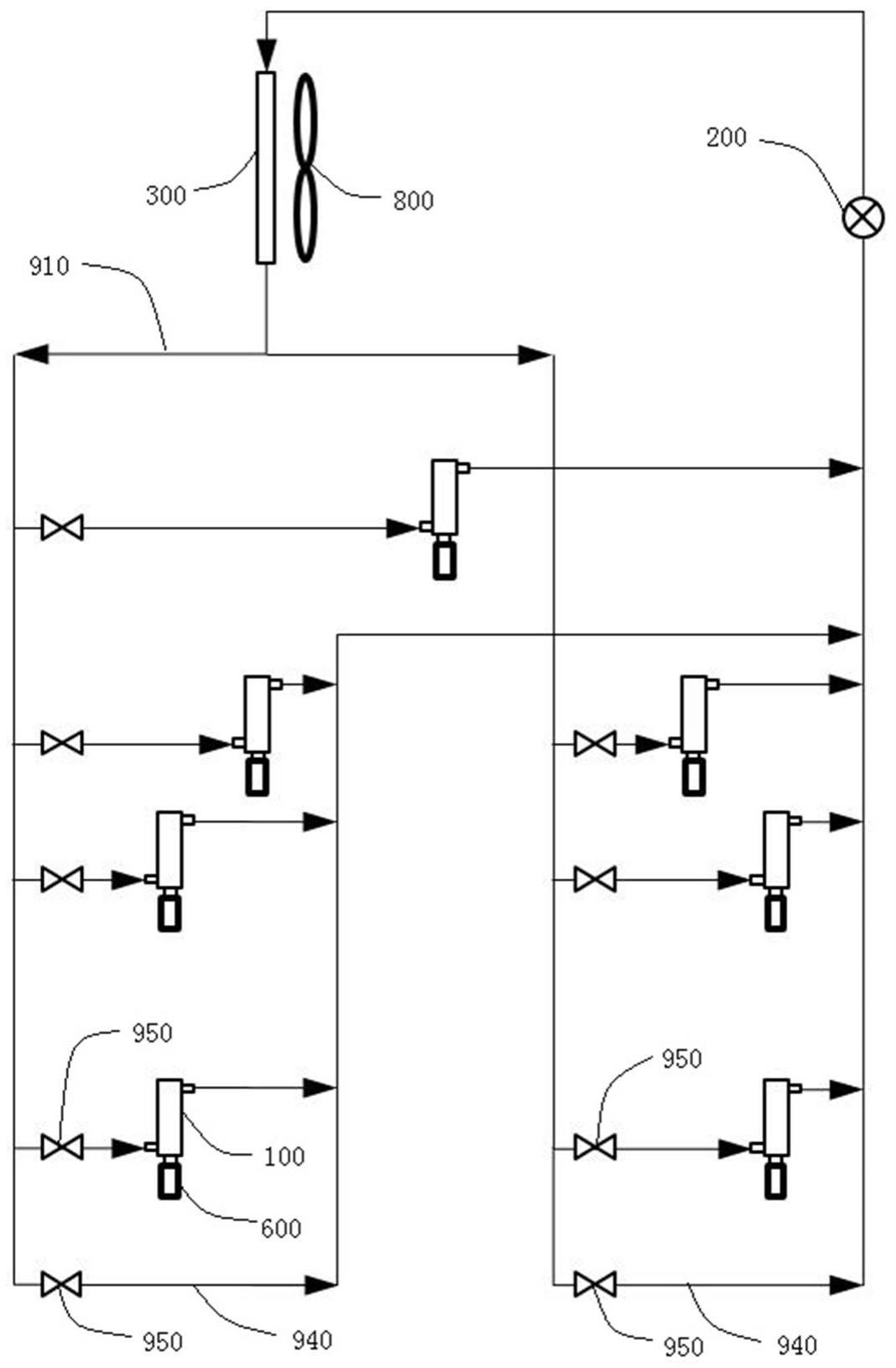
8.根据权利要求1所述的仿生热管理方法,其特征在于,所述仿生热管理系统包括并联设置的第一换热回路(910)、第二换热回路(920)和第三换热回路(930),所述冷凝器(300)分别通过所述第一换热回路(910)、所述第二换热回路(920)和所述第三换热回路(930)连通所述压缩机(200)。
9.根据权利要求1所述的仿生热管理方法,其特征在于,所述仿生热管理系统还包括旁通管路(940),所述压缩机(200)能够通过所述旁通管路(940)连通所述冷凝器(300),且所述旁通管路(940)设有截止阀(950)。
10.根据权利要求1所述的仿生热管理方法,其特征在于,所述储液室包括第一室(510)、第二室(520)和第三室(530),所述第一室(510)设于机器人(1000)的头部,所述第二室(520)设于机器人(1000)的胸腔,所述第三室(530)设于机器人(1000)的腹腔。
技术总结
本申请涉及一种仿生热管理方法,当外部空间的温度小于或等于第一预设温度,且IGBT模块的发热量和电池的发热量均小于第一预设发热量时,压缩机处于关闭状态,负压蒸发装置将热管换热器出液端的工质气化并排入外部空间;当外部空间温度大于第一预设温度且小于或等于第二预设温度,或者,IGBT模块和电池中一者的发热量大于第一预设发热量且小于或等于第二预设发热量时,压缩机处于启动状态,负压蒸发装置处于关闭状态;当外部空间温度大于第二预设温度,或者,IGBT模块和电池中一者的发热量大于第二预设发热量时,压缩机和负压蒸发装置均处于启动状态。本申请提供的仿生热管理方法,解决了机器人在散热过程中噪声较大且功耗过大的问题。
技术研发人员:陆国栋,柴中华,奚俊彬,史婷婷,华金亮,孙飞
受保护的技术使用者:浙江银轮机械股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!