一种路灯节能控制方法、系统、设备和存储介质与流程
本技术属于路灯控制,具体涉及一种路灯节能控制方法、系统、设备和存储介质。
背景技术:
1、现有技术中,在根据车辆与路灯的距离对路灯的亮度进行灵活控制的过程中,通常通过路灯上或路侧的单元对车辆的位置进行检测,从而根据得到的位置计算车辆与路灯的距离。这种位置检测方法难以准确检测车辆位置,且当车辆在高速公路上行驶时,车辆的行驶速度较快,这时采用路灯上或路侧的单元检测车辆位置会产生较大的误差,难以根据车辆与路灯的相对位置准确控制路灯的亮度以达到节能的目的。
2、因此,现有技术中缺少一种可以准确获取车辆与路灯的实时相对距离,从而准确控制路灯的开启和关闭,实现节约电力的技术。
技术实现思路
1、针对上述技术问题,本技术提出一种路灯节能控制方法、系统、设备和存储介质。
2、具体地,本技术提出一种路灯节能控制方法,其特征在于,包括:
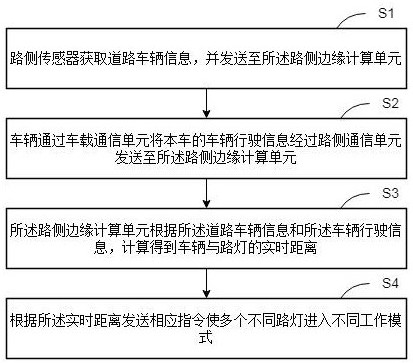
3、s1:路侧传感器获取道路车辆信息,并发送至所述路侧边缘计算单元;
4、s2:车辆通过车载通信单元将本车的车辆行驶信息经过路侧通信单元发送至所述路侧边缘计算单元;
5、s3:所述路侧边缘计算单元根据所述道路车辆信息和所述车辆行驶信息,计算得到车辆与路灯的实时距离;
6、s4:根据所述实时距离发送相应指令使多个不同路灯进入不同工作模式。
7、路侧使用带有lora模块的led路灯,led灯可以根据lora模块通信指令控制灯的打开关闭状态,并且led灯的工作状态也可以根据lora模块回传。mec通过获取高速路侧rsu、摄像头、雷达监控到的车辆速度、车辆位置、车辆行使方向信息,智能计算目标车辆与路侧路灯的距离,如果车辆进入阈值距离范围则打开对于路灯,否则关闭路灯从而启动节能作用 。同时led灯的lora模块也可以实时将led灯的工作状态回传给到mec,mec通过5g或者以太网通知到高速路政维护单位,启动路灯智能维护的作用,建设人力资源的投入,节省大量人工成本。
8、进一步的,所述步骤s1之前还包括:
9、所述路侧边缘计算单元记录一指定范围道路上所有路灯的路灯信息;所述路灯信息至少包括路灯编号,位置信息,路灯使用情况,维护时间,和工作状态。
10、进一步的,所述路侧传感器包括雷达单元和摄像单元;所述道路车辆信息包括所述雷达单元获取的雷达回波信号和所述摄像单元获取的车辆视频信息,所述步骤s3包括:
11、根据每间隔一指定时间接收的所述车辆行驶信息,计算得到第一距离;所述第一距离为车辆与所述路侧通信单元的实时距离;所述车辆行驶信息包括车辆行驶速度和车辆位置信息;
12、根据所述雷达回波信号,计算得到第二距离;所述第二距离为车辆与所述雷达单元的实时距离;
13、根据所述车辆视频信息,计算得到第三距离;
14、根据所述第一距离,第二距离和第三距离,计算得到所述车辆与路灯的实时距离。
15、进一步的,所述根据所述车辆视频信息,计算得到第三距离,包括:
16、根据车辆视频信息中车辆经过所述摄像单元的拍摄范围的时长,计算得到车辆行驶速度;
17、根据所述车辆行驶至所述摄像单元拍摄范围的边界时所在的位置,计算得到边界距离;所述边界距离为此时车辆与所述摄像单元的距离;
18、根据所述车辆行驶速度,所述边界距离和车辆离开所述摄像单元拍摄范围的时间,计算得到第三距离;所述第三距离为车辆行驶至超出所述摄像单元拍摄范围时与所述摄像单元的实时距离。
19、rsu获取车辆v2x obu每100ms上报一次的车辆gnss定位信息、车速、加速度信息,通过车辆gnss定位信息以及rsu本身位置信息,可以计算出车辆与rsu的距离r1;
20、根据雷达回波信号以及雷达测距公式,计算出目标车辆与雷达的距离r2;
21、根据摄像头记录的视频测量出车辆经过摄像头划定视野内的时间,从而测量得到车速v,并且根据车辆离开摄像头视野内的位置,可以计算出车辆距离tempr。再结合车速和离开视野的时间,可以预测不在摄像头视野时距离摄像头距离r3=tempr+vt;
22、综合r1、r2、r3计算车辆与rsu距离;
23、由于rsu、灯的id号和位置信息都是固定已知的,从而mec可以计算出车辆与路灯的距离。
24、进一步的,所述步骤s4包括:
25、当车辆接近前方路灯的实时距离小于一阈值,所述路侧边缘计算单元向路灯通信单元发送指令以启动所述前方路灯;
26、当车辆远离后方路灯的实时距离大于一阈值,所述路侧边缘计算单元向路灯通信单元发送指令以关闭所述后方路灯;
27、所述路灯通信单元在根据接收到的路侧边缘计算单元指令发送指令使路灯启动或关闭后,将所述路灯的工作状态回传至所述路侧边缘计算单元。
28、路灯通信单元将所述路灯的工作状态回传至所述路侧边缘计算单元,路侧边缘计算单元可以通过5g或者以太网通知到高速路政维护单位,启动路灯智能维护的作用,建设人力资源的投入,节省大量人工成本。
29、具体地,本技术提出一种根据所述的路灯节能控制方法的系统,其特征在于,所述系统包括:
30、路侧传感器,用于获取道路车辆信息,并发送至所述路侧边缘计算单元;
31、车载通信单元,用于将车辆行驶信息经过路侧通信单元发送至所述路侧边缘计算单元;
32、路侧通信单元,用于接收所述车载通信单元发送的车辆行驶信息,并将其发送至路侧边缘计算单元;
33、路侧边缘计算单元,用于根据所述道路车辆信息和所述车辆行驶信息,计算得到车辆与路灯的实时距离;
34、和路灯通信单元,用于根据所述实时距离发送相应指令使多个不同路灯进入不同工作模式。
35、进一步的,led路灯上带有作为路灯通信单元的lora模块,用于根据汽车与路灯的实时距离发送相应指令使多个不同路灯进入不同工作模式;在本实施例中,每一盏led路灯之间通过lora无线通信通信,led路灯与作为路侧边缘计算单元的mec通过lora无线通信通信;本实施例中路侧传感器包括雷达和红外摄像头,均与作为路侧边缘计算单元的mec通过以太网或5g通信;车载通信单元(obu)与路侧通信单元(rsu)通过c-v2x pc5接口通信,路侧通信单元(rsu)之间也通过c-v2x pc5接口通信;路侧通信单元(rsu)与作为路侧边缘计算单元的mec通过5g uu接口通信。
36、进一步的,所述路侧传感器包括雷达单元和摄像单元;
37、所述雷达单元用于获取的雷达回波信号;
38、所述摄像单元用于获取车辆视频信息。
39、进一步的,所述系统还包括路灯控制单元,所述路灯控制单元用于根据所述路灯通信单元的指令控制路灯的启动和关闭。
40、具体地,本技术提出一种计算机设备,包括:
41、存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如所述的路灯节能控制方法。
42、具体地,本技术提出一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令被控制处理器执行时实现如所述的路灯节能控制方法。
43、综上,本技术提出一种路灯节能控制方法、系统、设备和存储介质,路侧传感器获取道路车辆信息,并发送至所述路侧边缘计算单元;车辆通过车载通信单元将本车的车辆行驶信息经过路侧通信单元发送至所述路侧边缘计算单元;所述路侧边缘计算单元根据所述道路车辆信息和所述车辆行驶信息,计算得到车辆与路灯的实时距离:根据所述实时距离发送相应指令使多个不同路灯进入不同工作模式。本技术实现了精准获取车辆与路灯的实时距离,从而实现对根据精确的实时距离对路灯的工作模式进行精准的实时控制,相比现有技术更能达到节能的目标。
44、与现有技术相比,本技术至少存在以下有益效果:
45、本技术根据路侧传感器获取的道路车辆信息和车载通信单元发送的车辆行驶信息,计算得到车辆与路灯的实时距离从而使不同路灯进入不同工作模式,实现了精准获取车辆与路灯的实时距离,从而实现对根据精确的实时距离对路灯的工作模式进行精准的实时控制,相比现有技术更能达到节省电力的目标。
- 还没有人留言评论。精彩留言会获得点赞!