一种无人驾驶地铁列车脱轨检测控制装置的制作方法
[0001]
本发明涉及列车脱轨检测控制电路,特别适用于无人驾驶地铁列车脱轨检测系统。
背景技术:
[0002]
随着国内全自动驾驶地铁技术的发展和应用,脱轨检测系统已成为全自动驾驶安全运行防护中的重要一环,脱轨检测系统的应用处在起步阶段。
[0003]
脱轨检测系统可通过位置检测传感器检测转向架车轮是否正常运行于轨道上来实现。当车轮运行于轨道正上方或处于正常偏摆范围内时,脱轨检测装置提供正常的检测信号,当车轮脱离轨道正上方或脱离正常偏摆范围内时,则提供脱轨报警的检测信号。或者脱轨检测系统也可通过振动检测传感器采集强冲击振动信息,通过特定的冲击振动信号特征判断列车轮对是否发生脱轨,此方案依赖转速输入信号作为检测条件。
[0004]
现有脱轨检测技术方案,在列车中的每节单车配备一套脱轨检测控制单元,系统具有110v电源输入,通过位置检测传感器检测转向架车轮是否正常运行于轨道上或通过振动检测传感器采集强冲击振动信息的特征进而判断列车轮对是否发生脱轨(需转速信号输入作为诊断条件),并由内部逻辑控制单元输出脱轨报警型号驱动内部继电器,输出脱轨报警信号。
[0005]
现有技术的缺点1、现有内部逻辑控制单元输出的脱轨报警信号安全性及可靠性差,电路发生单点故障(继电器触点不动作或粘连)可导致不输出或误输出,造成安全隐患;2、系统缺少自身故障报警输出,例如因电源输入故障会导致单车丢失脱轨检测功能,或当单车脱轨检测单元内部发生任意故障时,没有故障报警警示单车丢失脱轨检测功能功能,安全性降低;3、每节单车独立输出脱轨检测信号,输出脱轨报警信号电气接口繁琐,故障点较多,可用性差;脱轨报警信息及系统运行及故障等信息无内网通信或内网通信安全性低,冗余性低,不利于自动化监控;4、基于转速信号输入作为诊断条件的脱轨检测系统,转速输入信号单点故障,可导致整车脱轨检测功能失效,安全性、可用性、冗余性较差;5、未设置复位、切除等操作功能,可用性差。
技术实现要素:
[0006]
本发明的目的主要是针对上述现有技术的问题,提供一种无人驾驶地铁列车脱轨检测控制装置。
[0007]
为了解决以上技术问题,本发明提供的无人驾驶地铁列车脱轨检测控制装置,包含主控模块、与该主控模块连接的通信模块、信号采集模块和电源模块,其特征在于:设有脱轨检测信号输出端口,当脱轨检测信号输出端口触点接通表示输出脱轨报警信号;主控
模块的报警信号输出端并联连接有第一安全继电器和第二安全继电器,第一安全继电器第一常开触点和第二安全继电器第一常开触点并联形成第一安全支路,第一安全继电器第二常开触点和第二安全继电器第二常开触点并联形成第二安全支路,所述第一安全支路与第二安全支路串联连接于脱轨检测信号输出端口。
[0008]
由此,电路中由原有的1个触点的使用变成4个触点相互冗余的同时使用,任何一个继电器线圈故障或单个继电器触点故障不动作不影响脱轨信号正常输出,保证可用性的同时提高安全性。
[0009]
进一步的,无人驾驶地铁列车脱轨检测控制装置还具有第三安全继电器和脱轨功能失效输出端口,所述第三安全继电器由主控模块根据系统自检故障状态进行控制,若存在系统故障则主控模块驱动使第三安全继电器失电,否则第三安全继电器得电, 第三安全继电器的常开触点串联在电源输入端口和电源模块之间的线路上,同时串联于电源输入端口和脱轨功能失效输出端口之间的线路上。
[0010]
继电器常开触点串联在电源失效检测信号失效输出端口的前端,由此可对外输出单节车脱轨检测控制装置的工作状态,高电平为正常工作,低电平为故障状态,当输入电源端口故障或其他无论何种故障导致的单节车脱轨检测失效都可以由此端口输出报警型号,提示操作人员,提高安全性。
[0011]
本发明还要求保护一种地铁列车,其特征在于:包含上述的无人驾驶地铁列车脱轨检测控制装置。
附图说明
[0012]
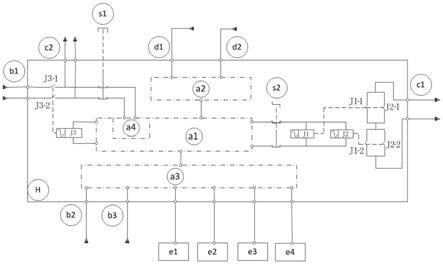
图1为本发明的无人驾驶地铁列车脱轨检测控制装置的电原理图。
具体实施方式
[0013]
下面结合附图对本发明的实施方式做解释说明。
[0014]
如图1所示,本实施例无人驾驶地铁列车脱轨检测控制装置h,包含主控模块a1、与该主控模块a1连接的通信模块a2、信号采集模块a3和电源模块a4,车脱轨检测控制装置还具有脱轨检测信号输出端口c1、脱轨功能失效输出端口c2、电源输入端口b1。信号采集模块a3与安装于转向架的四个脱轨检测传感器e1、e2、e3、e4连接,采集振动信号,由主控模块a1判断是否脱轨。
[0015]
主控模块a1的报警信号输出端并联连接有第一安全继电器j1和第二安全继电器j2,第一安全继电器第一常开触点j1-1和第二安全继电器第一常开触点j2-1并联形成第一安全支路,第一安全继电器第二常开触点j1-2和第二安全继电器第二常开触点j2-2并联形成第二安全支路,该第一安全支路与第二安全支路串联连接于脱轨检测信号输出端口c1。当脱轨检测信号输出端口c1触点接通表示输出脱轨报警信号。
[0016]
脱轨报警信号作为最重要的一个输出信号,为防止不输出或误输出故障,在脱轨报警信号输出电路中设置2个继电器线圈并联,并将此2个继电器的各1组触点串联,将此2个继电器的另1组触点串联,再将2个串联电路并联,由此,电路中由原有的1个触点的使用变成4个触点相互冗余的同时使用,任何一个继电器线圈故障或单个继电器触点故障不动作不影响脱轨信号正常输出,保证可用性的同时提高安全性。
[0017]
如图1所示,本实施例无人驾驶地铁列车脱轨检测控制装置,还具有第三安全继电器j3,第三安全继电器j3由主控模块a1根据系统自检故障状态进行控制,若存在系统故障则主控模块a1驱动使第三安全继电器j3失电,否则第三安全继电器j3得电。该第三安全继电器j3具有两个常开触点j3-1、j3-2,串联在电源输入端口b1和电源模块a4之间的正负极线路上,同时也串联于电源输入端口b1和脱轨功能失效输出端口c2之间的线路上。
[0018]
由此可对外输出单节车脱轨检测控制装置的工作状态,高电平为正常工作,低电平为故障状态,当输入电源端口故障或其他无论何种故障导致的单节车脱轨检测失效都可以由此端口输出报警型号,提示操作人员,提高安全性。
[0019]
本实施例中,脱轨检测控制装置h设置2套通信内网,为提升安全性,一套内网采用硬线控制形式,另一套采用网络通信形式(可使用以太网、can网、mvb等)。具体来说,通信模块a2具有硬线控制信号端口d1和网络数据通信端口d2,任意检测到脱轨状态的中间车脱轨检测控制装置h将脱轨报警信号通过硬线控制信号端口d1经硬线传递至两端头车的脱轨检测控制装置;中间车辆的脱轨检测控制装置h则将运行数据和故障数据通过网络数据通信端口d2经列车网络发送至两端头车的脱轨检测控制装置。
[0020]
由此确保内网传输的安全性和可用性。同时,由于所增设内网通信,可使任意中间车的脱轨检测控制装置检测到的脱轨状态信息传递给两端头车的脱轨检测控制装置h,并由2端头车集中对外输出,保证每节车脱轨检测功能的同时简化电气接口,减少故障点,同时两端头车的脱轨检测装置通过内网通信互为冗余,当一端发生故障,可由另一端接替输出功能,提高安全性和可用性。两端头车的脱轨检测装置可与车辆网络总线通信,将这个脱轨检测系统的报警状态、运行状态、故障状态上传车辆,利于智能化维护。
[0021]
针对基于转速信号输入作为诊断条件脱轨检测系统,在每个头车的脱轨检测控制装置h的设置一个转速信号输入端口b2和一个零速信号输入端口b3。转速信号输入端口b2和零速信号输入端口b3与信号采集模块a3连接。主控模块a1将信号采集模块a3采集的零速信号与转速信号作比对诊断,用于判断转速信号的有效性。正常工作时,头车的脱轨检测控制装置h默认获取一路转速信号,当零速信号与转速信号对比判定不一致故障时,则本端脱轨检测控制装置h判定其获取的转速信号失效,并通过内网切换获取尾车转速值,以此诊断措施提高输入信号的安全性,保证本系统的安全性。
[0022]
为提高本系统的可操作性、提升车辆使用过程中的维护性,每节车本地的脱轨检测控制装置h上设置一个复位按钮s1,复位按钮串联在第三安全继电器j3的常开触点与电源模块a4之间的线路上。一旦检测到脱轨,可按压综合诊断仪中脱轨诊断单元面板上的复位按键,对系统进行复位,脱轨状态可相应复位,便于操作人员对脱轨检测模块进行一定的人工控制,提高可操作性;检测到脱轨时,在操作脱轨功能复位之前,该常闭触点将持续保持断开,以保证脱轨状态排除之前车辆持续接收到脱轨报警信号并处于安全预警状态,以保证安全性。
[0023]
同时,每节车本地的脱轨检测控制装置上设置一个切除开关s2,当切除开关s2置于闭合位置,则相应车的脱轨检测功能开启,当切除开关s2置于断开位置,则相应车的脱轨检测功能关闭。当系统出现故障可人为操作此开关切除单车的脱轨检测功能。当切除开关处于切除状态时,系统可以检测到,并会通过内网记录并传递给车辆,在相应显示屏限速单车切除状态。由此提高操作性和维护性。
[0024]
除上述实施例外,本发明还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1