镜头控制方法、摄像模组及电子设备与流程
1.本技术涉及摄像技术领域,尤其涉及一种镜头控制方法、摄像模组及电子设备。
背景技术:
2.当电子设备在非稳定环境下进行拍摄时,镜头偏离预设的对焦位置,难以获得清晰的图像。特别是在长时间的录像过程中,镜头偏离对焦位置并不断晃动,会导致录制画面抖动、变形、离焦等问题,难以获得高质量的视频。本技术实施例提出了一种镜头控制方法,通过将镜头维持在其远焦位置,使得电子设备在非稳定环境下也能够录制高质量的视频。
技术实现要素:
3.本技术提供一种镜头控制方法、摄像模组及电子设备。电子设备通过该镜头控制方法,能够在电子设备处于非稳定环境时,控制镜头相对感光元件保持稳定位置,以提高录制视频的质量。
4.第一方面,本技术提供一种镜头控制方法,应用于具有摄像模组的电子设备。摄像模组包括对焦马达和镜头,对焦马达包括固定部和可动部,镜头安装于可动部,可动部能够相对固定部移动,可动部下沉至底置位置时,可动部抵持固定部,且镜头处于远焦位置。
5.镜头控制方法包括:摄像模组响应于自动对焦驱动信号,控制可动部带动镜头沿光轴方向移动;摄像模组响应于超级稳定驱动信号,控制可动部移动至底置位置,且保持在底置位置。其中,控制可动部移动至底置位置,也即,使可动部置底,可动部下沉至被允许的最底位置。
6.在本技术中,镜头控制方法能够使摄像模组控制镜头沿光轴方向移动至其对焦位置,从而使电子设备实现正常的自动对焦。此外,镜头控制方法能够使摄像模组控制可动部下沉至底置位置且保持在底置位置,使得可动部相对于固定部保持静止,镜头能够克服惯性稳定在其远焦位置,实现类似于定焦马达的超稳定效果。故而,即使处与非稳定的拍摄环境中,电子设备也可以拥有高质量的拍摄效果。
7.一种可能的实现方式中,镜头控制方法包括:电子设备响应于拍照指令,进入拍照模式,启动摄像模组并发送自动对焦驱动信号至摄像模组。
8.在本实现方式中,电子设备进入拍照模式,启动摄像模组并发送自动对焦信号至摄像模组,摄像模组响应于自动对焦驱动信号,控制可动部带动镜头移动至对焦位置,从而获得清晰的图像,使得用户能够获得高质量的图像,降低拍摄难度并提升使用体验。
9.一种可能的实现方式中,镜头控制方法包括:电子设备响应于录像指令,进入录像模式,启动摄像模组并发送自动对焦驱动信号至摄像模组。
10.在本实现方式中,电子设备进入录像模式,启动摄像模组并发送自动对焦信号至摄像模组,摄像模组响应于自动对焦驱动信号,控制可动部带动镜头移动至对焦位置,从而获得清晰的图像。
11.一种可能的实现方式中,镜头控制方法还包括:电子设备处于录像模式时,响应于
超级稳定录像指令,切换为超级稳定录像模式,发送超级稳定驱动信号至摄像模组。
12.示例性的,当电子设备处于录像模式时,用户可以根据拍摄环境输入超级稳定录像指令,电子设备根据用户操作从录像模式转变为超级稳定录像模式。电子设备处于超级稳定录像模式时,镜头处于其远焦位置并保持极佳的稳定性,使得摄像模组能够实现类似于定焦马达的超稳定效果,从而获得高质量的视频。
13.一种可能的实现方式中,镜头控制方法还包括:摄像模组处于启动状态时,电子设备响应于超级稳定录像指令,进入超级稳定录像模式,发送超级稳定驱动信号至摄像模组。
14.在本实现方式中,用户可以根据拍摄环境输入超级稳定录像指令,电子设备根据用户操作调整为超级稳定录像模式。电子设备处于超级稳定录像模式时,即使在非稳定的拍摄环境中,也能够克服惯性将镜头维持在其远焦位置,使得摄像模组能够实现类似于定焦马达的超稳定效果,从而获得高质量的图像,降低拍摄难度并提升使用体验。
15.一种可能的实现方式中,固定部包括磁路组件,可动部包括对焦线圈,对焦线圈处于磁路组件的磁场中。
16.控制可动部带动镜头沿光轴方向移动,包括:为对焦线圈提供第一电流,以使可动部带动镜头移动至对焦位置;控制可动部移动至底置位置,包括:为对焦线圈提供第二电流,以使可动部移动至底置位置;控制可动部保持在底置位置,包括:为对焦线圈提供第三电流,以使可动部保持在底置位置。
17.在本实现方式中,通入第一电流的对焦线圈在安培力的作用下,能够克服簧片组件的弹性力沿光轴方向移动,并带动对焦马达的可动部移动。安装于可动部上的镜头也会沿光轴方向移动,并在第一电流产生的安培力的作用下移动到对焦位置。其中,第一电流的大小及方向能够控制安培力的大小和方向,从而控制可动部的移动位移以及速度等参数。
18.在本实现方式中,摄像模组通过对焦线圈带动可动部运动,使得电子设备实现自动对焦功能;并通过对焦线圈将可动部维持在底置位置,使得电子设备实现超级稳定录像功能。省去了辅助线圈等结构,简化了驱动信号,并降低了功耗及发热量,减小对镜头内透镜的影响。
19.示例性的,电子设备实现自动对焦功能的镜头控制方法包括:
20.s01:处理器响应于自动对焦指令,发送被摄对象获取信号至摄像模组。
21.s02:摄像模组响应于被摄对象获取信号,获取被摄对象信息,并将被摄对象信息发送至处理器。
22.s03:处理器根据被摄对象信息确定镜头的对焦位置,形成能够驱动镜头移动至对焦位置的自动对焦驱动信号,并将自动对焦驱动信号发送至摄像模组的驱动芯片。
23.s04:摄像模组的驱动芯片依据自动对焦驱动信号、向摄像模组的对焦线圈提供第一电流。
24.s05:通入第一电流的对焦线圈控制可动部带动镜头沿平行于光轴的方向移至对焦位置。s06:通过霍尔组件获得可动部的实际位置,并将可动部的实际位置发送至处理器。
25.s07:处理器将实际位置与对焦位置进行对比,判断两者是否重合,也即镜头是否移动到预设的对焦位置。
26.具体地,若实际位置与对焦位置重合,说明此时镜头已经移动至预设的对焦位置,则结束自动对焦;若实际位置与对焦位置未重合,说明镜头未移动至预设的对焦位置,则根
据可动部的实际位置,形成能够驱动镜头移动至预设的对焦位置的自动对焦驱动信号,并将自动对焦驱动信号发送至摄像模组的驱动芯片。再次执行步骤s04至s07,如此循环进行,直至实际位置与对焦位置重合,也即镜头移动至预设的对焦位置,则结束自动对焦程序。
27.示例性的,电子设备实现超级稳定录像功能的镜头控制方法包括:
28.s11:处理器响应于超级稳定录像指令,并发送超级稳定驱动信号至摄像模组的驱动芯片。
29.s12:驱动芯片向对焦线圈提供第二电流,通入第二电流的对焦线圈带动可动部移动至底置位置。之后驱动芯片向对焦线圈提供第三电流,通入第三电流的对焦线圈控制可动部保持在底置位置。
30.s13:通电后的对焦线圈和辅助线圈带动可动部移动至底置位置并保持在底置位置。
31.另一种可能的实现方式中,固定部包括磁路组件,可动部包括对焦线圈和辅助线圈,对焦线圈和辅助线圈处于磁路组件的磁场中。
32.控制可动部带动镜头沿光轴方向移动,包括:为对焦线圈提供第一电流,以使可动部带动镜头移动至对焦位置;控制可动部移动至底置位置,包括:为对焦线圈提供第二电流,和/或为辅助线圈提供第三电流,以使可动部移动至底置位置;控制可动部保持在底置位置,包括:为对焦线圈提供第四电流,和/或为辅助线圈提供第五电流,以使可动部保持在底置位置。
33.在本实现方式中,摄像模组处于自动对焦工作模式时,可动部在对焦线圈的安倍力作用下,能够沿光轴方向移动,并带动镜头移动至其对焦位置,使电子设备实现自动对焦功能。摄像模组处于超级稳定工作模式时,可动部在对焦线圈及辅助线圈的安培力的共同作用下保持在底置位置上,能够为可动部提供更大的压紧力,使电子设备即使处于非稳定的拍摄环境中,也能够实现超级稳定录像功能,从而获得清晰的拍摄效果。
34.示例性的,电子设备实现自动对焦功能的镜头控制方法可参考上述步骤s01至s07。
35.示例性的,电子设备实现超级稳定录像功能的镜头控制方法包括:
36.s11:处理器响应于超级稳定录像指令,并发送超级稳定驱动信号至摄像模组的驱动芯片。
37.s12:摄像模组的驱动芯片依据超级稳定驱动信号向对焦线圈和辅助线圈提供电流。
38.s13:通电后的对焦线圈和辅助线圈带动可动部移动至底置位置并保持在底置位置。
39.具体地,在步骤s12中,驱动芯片向对焦线圈提供第二电流,向辅助线圈提供第三电流,通入第二电流的对焦线圈和通入第三电流的辅助线圈带动可动部移动至底置位置。之后驱动芯片向对焦线圈提供第四电流,向辅助线圈提供第五电流,通入第四电流的对焦线圈和通入第五电流的辅助线圈控制可动部保持在底置位置。
40.在本实现方式中,第二电流与第三电流的大小可以相同,第四电流与第五电流的大小可以相同,第二电流可以大于第四电流。通入第四电流的对焦线圈用于控制可动部保持在底置位置,使用较小的电流能够降低功耗,同时减少线圈发热量,降低发热量对镜头透
镜的影响。在其他一些实现方式中,第二电流和第四电流的大小可以相同。
41.在其他一些实现方式中,第二电流和第三电流的大小可以不同。例如第二电流大于第三电流,通入第二电流的对焦线圈作为主驱动部件带动可动部移动至底置位置。在其他一些实现方式中,可以通过调节第三电流的大小来控制可动部的移动速度。
42.在其他一些实现方式中,第四电流和第五电流的大小可以不同。例如当电子设备检测到剧烈晃动时,增大第五电流,从而使得可动部稳定在底置位置。在其他一些实现方式中,第五电流也可以是瞬时脉冲电流。
43.在其他一些实现方式中,驱动芯片可以仅向对焦线圈提供第二电流和第四电流,可动部由对焦线圈带动,向底置位置移动并保持在底置位置。
44.再一种可能的实现方式中,固定部包括磁路组件和辅助线圈,可动部包括对焦线圈和辅助磁路组件,对焦线圈处于磁路组件的磁场中,辅助线圈处于辅助磁路组件的磁场中。
45.控制可动部带动镜头沿光轴方向移动,包括:为对焦线圈提供第一电流,以使可动部带动镜头移动至对焦位置;控制可动部移动至底置位置,包括:为对焦线圈提供第二电流,和/或为辅助线圈提供第三电流,以使可动部移动至底置位置;控制可动部保持在底置位置,包括:为对焦线圈提供第四电流,和/或为辅助线圈提供第五电流,以使可动部保持在底置位置。
46.在本实现方式中,摄像模组处于自动对焦工作模式时,在对焦线圈的安倍力作用下,可动部能够沿光轴方向移动,并带动镜头移动至其对焦位置,使电子设备实现自动对焦功能。摄像模组处于超级稳定工作模式时,可动部在对焦线圈及辅助线圈的安培力的共同作用下保持在底置位置上。能够为可动部提供更大的压紧力,使电子设备即使处于非稳定的拍摄环境中,也能够实现超级稳定录像功能,从而获得清晰的拍摄效果。
47.示例性的,电子设备实现自动对焦功能的镜头控制方法可参考上述步骤s01至s07。
48.示例性的,电子设备实现超级稳定录像功能的镜头控制方法包括:
49.s11:处理器响应于超级稳定录像指令,并发送超级稳定驱动信号至摄像模组的驱动芯片。
50.s12:摄像模组的驱动芯片依据超级稳定驱动信号向对焦线圈和辅助线圈提供电流。
51.s13:通电后的对焦线圈和辅助线圈带动可动部移动至底置位置并保持在底置位置。
52.具体地,在步骤s12中,驱动芯片向对焦线圈提供第二电流,向辅助线圈提供第三电流,通入第二电流的对焦线圈和通入第三电流的辅助线圈带动可动部移动至底置位置。之后驱动芯片向对焦线圈提供第四电流,向辅助线圈提供第五电流,通入第四电流的对焦线圈和通入第五电流的辅助线圈控制可动部保持在底置位置。
53.一种可能的实现方式中,摄像模组还包括簧片组件,簧片组件连接固定部与可动部,簧片组件用于在摄像模组未通电时,将可动部稳定在底置位置。示例性的,簧片组件还可以采用导电材料,为安装于镜头支架上的线圈提供电流路径。
54.示例性的,当摄像模组未通电时,簧片组件形变所产生的弹性力可以提供预压力,
以将对焦马达的可动部稳定在底置位置。在非稳定的拍摄环境中,簧片组件提供的预压力有利于使镜头克服惯性、保持在其远焦位置,获得清晰的拍摄效果。在其他一些实现方式中,簧片组件也可以不发生形变并提供预压力,也即当对焦马达的可动部处于底置位置时,镜头支架与支座之间接触,但不产生相互作用力。
55.一种可能的实现方式中,摄像模组还包括防抖马达,防抖马达包括防抖固定部和防抖可动部,对焦马达安装于防抖可动部,防抖可动部能够相对防抖固定部移动或转动;
56.镜头控制方法还包括:摄像模组响应于自动防抖驱动信号,控制防抖可动部带动镜头、相对防抖固定部移动或转动。
57.在本实现方式中,防抖可动部能够相对防抖固定部移动或转动,从而带动镜头运动,以补偿在非稳定环境下拍摄时、镜头因惯性产生的抖动,从而提高拍摄质量。
58.第二方面,本技术还提供了一种电子设备,示例性的,上述镜头控制方法可以用于本技术提供的电子设备。可以理解的,上述镜头控制方法也可以用于具有其他结构的电子设备。
59.在本技术中,电子设备包括处理器和存储器,处理器耦合存储器,存储器用于存储计算机程序代码,计算机程序代码包括计算机指令,当处理器执行计算机指令时,电子设备执行本技术所提供的上述镜头控制方法。
60.示例性的,处理器包括一个或多个处理单元。不同的处理单元可以是独立的器件,也可以集成在一个或多个处理器中。示例性的,处理单元可以包括图像信号处理器等。图像信号处理器可以用于将摄像模组输出的图像数据转换为数字图像信号。图像信号处理器还可以对图像的噪点、亮度、肤色等、以及拍摄场景的曝光、色温等参数进行算法优化。
61.第三方面,本技术还提供了一种摄像模组,上述镜头控制方法可以用于本技术提供的摄像模组。可以理解的,上述镜头控制方法也可以用于具有其他结构的摄像模组。
62.在本技术中,摄像模组包括对焦马达和镜头,对焦马达包括固定部和可动部,可动部位于固定部的内侧,镜头安装于可动部,可动部能够相对固定部移动,且移动方向平行于镜头的光轴,可动部下沉至底置位置时,可动部抵持固定部,且镜头处于远焦位置;固定部包括磁路组件,可动部包括镜头支架、对焦线圈和辅助线圈,镜头安装于镜头支架的中部,对焦线圈和辅助线圈安装于镜头支架的外侧,对焦线圈和辅助线圈处于磁路组件的磁场中。
63.在本实现方式中,可动部下沉至底置位置时,可动部抵持固定部,此时可动部相对于固定部保持静止,使得镜头能够克服惯性稳定在其远焦位置。
64.在本实现方式中,辅助线圈与对焦线圈共用一组磁路组件,能够压缩摄像模组内部空间,并降低成本。此外,磁路组件安装于固定部,对焦线圈和辅助线圈安装于可动部,能够减少可动部的重量,降低功耗。
65.一种可能的实现方式中,对焦线圈和辅助线圈堆叠排布或错开排布。其中,对焦线圈及辅助线圈可以堆叠设置,有利于避免镜头支架相对垂直于光轴的平面产生倾角,导致镜头支架晃动从而影响拍摄画面的质量。因此,可以通过灵活设计通入对焦线圈及辅助线圈电流的大小,控制镜头支架的移动速度,使其适用于更多应用场景。在其他一些实现方式中,对焦线圈及辅助线圈也可以错开设置。
66.第四方面,本技术还提供了另一种摄像模组,包括对焦马达和镜头,对焦马达包括
固定部和可动部,可动部位于固定部的内侧,镜头安装于可动部,可动部能够相对固定部移动,且移动方向平行于镜头的光轴,可动部下沉至底置位置时,可动部抵持固定部,且镜头处于远焦位置;固定部包括磁路组件和辅助线圈,可动部包括镜头支架、对焦线圈和辅助磁路组件,镜头安装于镜头支架的中部,辅助磁路组件和对焦线圈安装于镜头支架的外侧,对焦线圈处于磁路组件的磁场中,辅助线圈处于辅助磁路组件的磁场中。
67.在本实现方式中,可以理解的,辅助磁路组件与辅助线圈的安装位置可以互换,即辅助线圈安装于镜头支架外侧,辅助磁路组件安装于固定部,只要满足辅助线圈处于辅助磁路组件的磁场中内即可。其中,辅助线圈安装于镜头支架外侧,能够减少可动部的重量,降低功耗。
68.一种可能的实现方式中,固定部还包括支座和电路板,电路板位于支座与镜头支架之间,且固定于支座,辅助线圈固定于电路板。其中,电路板可以用于向辅助线圈供电,使其产生沿平行于光轴方向运动的安培力。此外,电路板固定于支架上,能够节省摄像模组的内部空间,使各部件的排布更加紧凑。
69.一种可能的实现方式中,摄像模组还包括簧片组件,簧片组件连接固定部与可动部,簧片组件用于提供弹性力,可动部在弹性力的作用下靠近或稳定在底置位置。
70.示例性的,当摄像模组未通电时,簧片组件形变所产生的弹性力可以提供预压力,以将对焦马达的可动部稳定在底置位置。在非稳定的拍摄环境中,簧片组件提供的预压力有利于使镜头克服惯性、保持在其远焦位置,获得清晰的拍摄效果。在其他一些实现方式中,簧片组件也可以不发生形变并提供预压力,也即当对焦马达的可动部处于底置位置时,镜头支架与支座之间接触,但不产生相互作用力。
71.示例性的,当摄像模组通电后,可动部离开底置位置,簧片组件发生形变产生弹性力,该弹性力用于使可动部回复至初始位置、以靠近底置位置。
72.一种可能的实现方式中,摄像模组还包括霍尔组件,霍尔组件包括霍尔磁铁和霍尔线圈,霍尔磁铁安装于可动部,霍尔线圈安装于固定部,霍尔线圈位于霍尔磁铁的磁场中。其中,霍尔组件用于获得可动部的实际位置,电子设备能够根据摄像模组反馈的实际位置,对驱动信号进行调整,从而提高摄像模组的自动对焦的精度。
73.第五方面,本技术还提供了一种电子设备,包括处理器和上述摄像模组,处理器电连接摄像模组。处理器可以控制摄像模组的拍摄动作,还可以从摄像模组获取图像数据并处理图像数据。
附图说明
74.图1是本技术提供的电子设备在一些实施例中的结构示意图;
75.图2是图1所示电子设备在另一个角度的结构示意图;
76.图3是图2所示摄像模组在一些实施例中的内部结构示意图;
77.图4是电子设备在解锁模式下,显示屏显示的图形用户界面示意图;
78.图5是电子设备处于拍照模式时的图形用户界面在一些实施例中的示意图;
79.图6是电子设备处于录像模式时的图形用户界面在一些实施例中的示意图;
80.图7是电子设备处于超级稳定录像模式时的图形用户界面在一些实施例中的示意图;
81.图8是电子设备处于录像模式时的图形用户界面在另一些实施例中的示意图;
82.图9是电子设备实现两种拍摄功能的方法的流程示意图;
83.图10是图3所示对焦马达和镜头在第一种实施例中的组装结构示意图;
84.图11是图10所示对焦马达的部分分解示意图;
85.图12是图11所示对焦马达部分结构的分解示意图;
86.图13是图12所示支座的结构示意图;
87.图14是图12所示下簧片的结构示意图;
88.图15是图13所示支座与图14所示下簧片在一些实施例中的组装结构示意图;
89.图16是图12所示镜头支架的另一个视角的结构示意图;
90.图17是图16所示镜头支架与图14所示下簧片在一些实施例中的组装结构示意图;
91.图18是图12所示上簧片的结构示意图;
92.图19是图12所示镜头支架的结构示意图;
93.图20是图19所示镜头支架、图14所示下簧片与图18所示上簧片在一些实施例中的组装结构示意图;
94.图21是图20所示结构与图13所示支座在一些实施例中的组装结构示意图;
95.图22是图21沿d-d处剖开的结构示意图;
96.图23是图10所示对焦马达部分结构的示意图;
97.图24是图23所示结构沿c-c处剖开的示意图;
98.图25是图23所示结构沿b-b处剖开的示意图;
99.图26是图10所示结构沿a-a处剖开的示意图;
100.图27是图3所示对焦马达在第二种实施例中的结构示意图;
101.图28是图27所示对焦马达的部分分解示意图;
102.图29是图28所示对焦马达部分结构的分解示意图;
103.图30是图29所示电路板的结构示意图;
104.图31是图29所示支座与图30所示电路板在一些实施例中的组装结构示意图;
105.图32是图3所示对焦马达在第三种实施例中的内部示意图;
106.图33是镜头控制方法实现电子设备的自动对焦功能的流程示意图;
107.图34是镜头控制方法实现电子设备的超级稳定录像功能的流程示意图;
108.图35是图2所示摄像模组在其他一些可能实施例中的部分结构示意图。
具体实施方式
109.下面结合本技术实施例中的附图对本技术实施例进行描述。其中,本文中的“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。此外,在本技术实施例的描述中,除非另有说明,“多个”是指两个或多于两个。“以上”包括本数,例如,两个以上包括两个。
110.本技术提供一种电子设备100。电子设备100可以是手机、平板、笔记本电脑、数码相机(包括运动相机)、数码摄像机(包括运动摄像机)、视频监控设备、可穿戴设备、增强现实技术(augmented reality,ar)设备、虚拟现实技术(virtual reality,vr)设备、超级移动个人计算机(ultra-mobile personal computer,umpc)、上网本、个人数字助理
(personal digital assistant,pda)、无人驾驶飞机(unmanned aerial vehicle,简称为无人机)、行车记录仪等电子产品。可穿戴设备可以是智能手环、智能手表、无线耳机、眼镜及头盔等。本技术实施例以电子设备100是手机为例进行说明。
111.一些实施例中,请一并参阅图1及图2,图1是本技术提供的电子设备100在一些实施例中的结构示意图,图2是图1所示电子设备100在另一个角度的结构示意图。其中,电子设备100包括显示屏2、边框3以及后盖6。后盖6和显示屏2相背地固定于边框3两侧,后盖6、显示屏2和边框3共同围设出电子设备100的整机内腔。
112.显示屏2用于显示图像、视频等。显示屏2包括显示面板。显示面板可以采用液晶显示屏(liquid crystal display,lcd)、有机发光二极管(organic light-emittingdiode,oled)、有源矩阵有机发光二极体或主动矩阵有机发光二极体(active-matrixorganic light emitting diode,amoled)、柔性发光二极管(flex light-emittingdiode,fled)、mini led、micro led、micro-oled、量子点发光二极管(quantum dot lightemitting diodes,qled)等。在一些实施例中,电子设备100可以包括一个或多个显示屏。
113.如图1和图2所示,电子设备100还包括摄像模组1和摄像模组9,摄像模组1和摄像模组9收容于整机内腔中,摄像模组1和摄像模组9用于采集电子设备100外部的光信号,并形成对应的图像数据。示例性的,如图2所示,摄像模组1可以用于电子设备100的后置摄像模组。后盖6可以设有摄像孔8,摄像模组1通过摄像孔8采集电子设备100外部的光信号。如图1所示,摄像模组9可以用作电子设备100的前置摄像模组。显示屏2可以设有透光区域4,摄像模组9通过透光区域4采集电子设备100外部的光信号。在其他一些实施例中,电子设备100也可以包括一个或三个以上摄像模组,本技术实施例对此不作限定。
114.一些实施例中,如图2所示,电子设备100还可以包括处理器7,处理器7与显示屏2、摄像模组1及摄像模组9电连接。示例性的,处理器7包括一个或多个处理单元。不同的处理单元可以是独立的器件,也可以集成在一个或多个处理器中。示例性的,处理单元可以包括图像信号处理器(image signal processor,isp)等。图像信号处理器可以用于将摄像模组1输出的图像数据转换为数字图像信号。图像信号处理器还可以对图像的噪点、亮度、肤色等、以及拍摄场景的曝光、色温等参数进行算法优化。
115.一些实施例中,如图1所示,电子设备100还可以包括听筒5,听筒5设于电子设备100的顶部。其中,听筒5可以采用传统的空气传导技术进行声波传输,也可以采用骨传导技术进行声波传输。
116.示例性的,请参阅图3,图3是图2所示摄像模组1在一些实施例中的内部结构示意图。其中,摄像模组1包括镜头11、对焦马达12、底座13、电路板14及感光元件15。
117.底座13固定连接于电路板14的一侧。对焦马达12位于底座13远离电路板14的一侧、且固定连接于底座13的周缘。镜头11安装于对焦马达12的中部。感光元件15固定于电路板14朝向镜头11的一侧。
118.对焦马达12用于驱动镜头11沿平行于光轴10的方向移动。其中,光轴10指通过镜头11中心的线,“平行于光轴10的方向”在后文中也可以简称为光轴方向。在一些实施例中,对焦马达12可以是音圈马达(voice coil motor,vcm)、记忆金属(shape memory alloy)马达、陶瓷马达(piezo motor)以及步进马达(stepper motor)等。
119.镜头11用于采集被摄对象反射的光信号。在一些实施例中,镜头11可以包括镜筒
和安装于镜筒内侧的透镜组。示例性的,透镜组的透镜数量可以是5片至10片,例如7片、8片等。
120.示例性的,电路板14的中部设有安装槽,感光元件15至少部分位于安装槽内。感光元件15又叫图像传感器,感光元件15利用光电器件的光电转换功能将感光面上的光像转换为与光像成相应比例关系的电信号。一些实施例中,感光元件15可以是电荷耦合元件(charge-coupled device,ccd)或互补金属氧化物半导体器件(complementary metal oxide semiconductor)等。
121.一些实施例中,摄像模组1还包括滤光片16。滤光片16正对感光元件15设置,且固定于底座13的中部。底座13的中部设有通孔,通孔沿平行于光轴10的方向贯穿底座13。滤光片16覆盖通孔。示例性的,滤光片16可以是蓝玻璃(blue glass,bg),用于过滤红外线。
122.一些实施例中,请一并参阅图2及图3,其中摄像模组1还包括驱动芯片(图中未示出),驱动芯片用于接收来自处理器7的驱动信号,并将其转化为用来驱动对焦马达12的电流,对焦马达12在电流的驱动下驱动镜头11运动。
123.在本技术中,电子设备100具有多种拍摄模式,例如拍照模式、录像模式、超级稳定录像模式等。为了便于理解,本技术以下实施例将结合附图和应用场景,对上述两种拍摄功能在电子设备100上的实施例进行具体阐述。
124.示例性的,图4是电子设备100在解锁模式下,显示屏2显示的图形用户界面(graphical userinterface,gui)示意图。该图形用户界面为电子设备100的主界面,图形用户界面显示在显示屏2上。在本技术实施例中,定义图形用户界面中靠近听筒5的方位为“上”,远离听筒5的方位为“下”。可以理解的是,本技术中涉及的“上”、“下”等方位用词,是参考附加图式的方位进行的描述,并不是指示或暗指所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
125.主界面显示了多款第三方应用程序(application,app)的图标,例如微信图标302、qq图标303、设置图标304、相机图标305及图库图标306等。可以理解的,主界面还可以包括其他更多的应用程序的图标,本技术对此不作严格限定。在其他一些实施例中,相机图标305也可以在电子设备100锁屏模式下,显示在显示屏2的锁屏界面中,本技术对此不作严格限定。
126.示例性的,图5是电子设备100处于拍照模式时的图形用户界面在一些实施例中的示意图。当电子设备100检测到用户点击图4中所示相机图标305的操作后,启动相机应用,显示如图5所示的图形用户界面。
127.相机应用的图形用户界面可以包括取景框307、相册图标316、拍摄控件317及摄像头旋转控件318。其中取景框307中实时显示摄像模组1获取的预览图像。例如,被摄对象反射的光信号从镜头11进入摄像模组1内部,通过滤光片16,由感光元件15接收。感光元件15把光信号转换成电信号,之后将电信号传递给图像信号处理器。图像信号处理器将摄像模组1输出的电信号转换成数字图像信号,并对数字图像信号进行相关的加工处理之后,形成预览图像数据。显示屏2将预览图像实时显示在取景框307中。
128.示例性的,取景框307中可以设有自动对焦区域的示意框308。当电子设备100检测到用户点击屏幕2中取景框307的某个位置的操作后,被点击位置对应呈现示意框308的标示,电子设备100以被摄对象处于示意框308中的位置为对焦点进行自动对焦。
129.拍摄控件317用于拍摄照片或录制视频,当电子设备100检测到用户点击拍摄控件317的操作后,电子设备100执行拍摄照片程序或录制视频程序,通过摄像模组1进行拍摄或录像,并将拍摄的照片或录制的视频保存下来。
130.相册图标316用于快捷进入相册,当电子设备100检测到用户点击相册图标316的操作后,在显示屏2上展示保存的照片和/或视频。摄像头旋转控件318用于实现前置摄像头和后置摄像头的切换。
131.示例性的,取景框307的上方还可以设有用于调整图像效果的功能控件,例如闪光灯控件321等。其中,在其他一些实施例中,效果功能控件还可以包括其他功能控件,例如延长曝光时间控件等,本技术实施例对此不作限定。
132.示例性的,取景框307的下方还可以设有用于设置拍摄模式的功能控件,例如:人像模式控件311、录像模式控件312、拍照模式控件313、超级稳定录像模式控件314及更多模式控件315。示例性的,当电子设备100检测到用户点击图4中相机图标305的该操作后,启动摄像模组1、显示屏2显示相机应用的图形用户界面,此时电子设备100默认处于拍照模式。在其他一些实施例中,电子设备100也可以默认处于其他模式,例如录像模式等,本技术实施例对此不作限定。
133.示例性的,如图5所示,电子设备100处于拍照模式时,图形用户界面中拍照模式控件313位于拍摄控件317的上方。可以理解的,电子设备100切换为其他功能模式时,上述模式的功能控件对应移动至拍摄控件317的上方。在其他一些实施例中,拍照模式控件313也可以通过呈现不同的显示状态,与其他功能控件进行区分,从而起到提示用户所处的界面所对应的拍摄模式的作用。例如,拍照模式控件313的颜色与其他功能控件不同,或拍照模式控件313设有如图5所示的阴影区域等,本技术实施例对此不作限定,只要能够进行区分即可。
134.示例性的,请参阅图6,图6是电子设备100处于录像模式时的图形用户界面在一些实施例中的示意图。图6所示图形用户界面的部分设置可以参阅图5的相关描述,例如可以包括取景框307及拍摄控件317。其中取景框307的下方可以设有录像模式控件312、超级稳定录像模式控件314等拍摄模式的功能控件。取景框307中可以设有自动对焦区域的示意框308。取景框307中还可以显示录像时长图标318,录像时长图标318用于显示录制视频的时长。示例性的,电子设备100处于录像模式时,图形用户界面中录像模式控件312位于拍摄控件317的上方。
135.示例性的,请参阅图7,图7是电子设备100处于超级稳定录像模式时的图形用户界面在一些实施例中的示意图。图7所示图形用户界面的部分设置可以参阅图5的相关描述,例如可以包括取景框307及拍摄控件317。取景框307的下方可以设有超级稳定录像模式控件314等拍摄模式的功能控件。取景框307中还可以显示录像时长图标318,录像时长图标318用于显示录制视频的时长。示例性的,电子设备100处于超级稳定录像模式时,图形用户界面中超级稳定录像模式控件314位于拍摄控件317的上方。
136.请参阅图8,图8是电子设备100处于录像模式时的图形用户界面在另一些实施例中的示意图。本实施例的图形用户界面与图6所示实施例的图形用户界面大部分相同,两者的主要区别在于:在本实施例中,电子设备100处于录像模式时,取景框307的上方的效果功能控件还包括超级稳定录像控件322。当电子设备100检测到用户点击超级稳定录像控件
322的操作后,电子设备100从录像模式转变为超级稳定录像模式,取景框307中不再呈现自动对焦区域的示意框308。
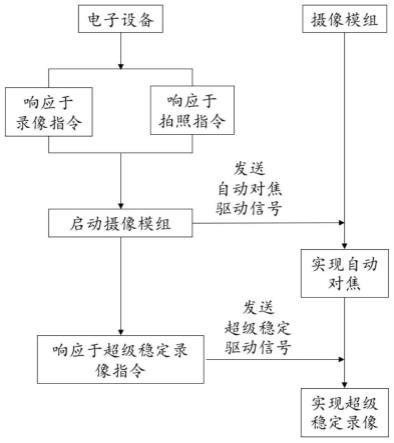
137.在本实施例中,电子设备100具有自动对焦功能和超级稳定录像功能。电子设备100的摄像模组1具有自动对焦工作模式和超级稳定工作模式,自动对焦工作模式用于支持电子设备100的自动对焦功能,超级稳定工作模式用于支持电子设备100的超级稳定录像功能。请参阅图9,图9是电子设备100实现两种拍摄功能的方法的流程示意图。
138.示例性的,电子设备100可以响应于拍照指令,进入拍照模式,启动摄像模组1,并发送自动对焦驱动信号至摄像模组1。示例性的,电子设备100也可以响应于录像指令,进入录像模式,启动摄像模组1,并发送自动对焦驱动信号至摄像模组1。其中,摄像模组1响应于自动对焦驱动信号,进入自动对焦工作模式,以支持电子设备100实现自动对焦功能。
139.其中,拍照指令有多种实现方式。例如,拍照指令可以是摄像模组1未启动时,电子设备100检测到的用户点击图4中图形用户界面的相机图标305的操作。拍照指令还可以是摄像模组1处于启动状态、电子设备100处于非拍照模式时(例如图6所示录像模式),电子设备100检测到的用户点击上述模式的图形用户界面中的拍照模式控件313的操作。在其他一些实施例中,拍照指令也可以是电子设备100检测到的用户点击非相机图标305的图标或控件的操作,例如用户在支付宝的图形用户界面中点击人脸身份信息识别控件,用户在微信的图形用户界面中点击视频聊天控件等。可以理解的,拍照指令还可以是电子设备100检测到的用户的其他操作,例如语音控制、机械键按压动作等,本技术实施例对此不作限定。
140.同样的,录像指令也可以有多种实现方式,例如录像图标被触发、应用程序调用、语音控制等。录像指令的相关描述可以参阅拍照指令,此处不再赘述。
141.示例性的,如图9所示,摄像模组1处于启动状态时,电子设备100还可以响应于超级稳定录像指令,进入超级稳定录像模式,并发送超级稳定驱动信号至摄像模组1。其中,摄像模组1响应于超级稳定驱动信号,进入超级稳定工作模式,以支持电子设备100实现超级稳定录像功能。
142.其中,超级稳定录像指令可以有多种实施例。在一些实施例中,超级稳定录像指令可以是摄像模组1处于启动状态、电子设备100处于非超级稳定录像模式(例如图5所示拍照模式或图6所示录像模式)时,电子设备100检测到的用户点击上述模式的图形用户界面中的超级稳定录像模式控件314的操作。
143.示例性的,电子设备100处于录像模式时,可以响应于超级稳定录像指令,进入超级稳定录像模式,并发送超级稳定驱动信号至摄像模组1。摄像模组1响应于超级稳定驱动信号,进入超级稳定工作模式,以支持电子设备100实现超级稳定录像功能。
144.其中,超级稳定录像指令可以是电子设备100处于录像模式时,电子设备100检测到的用户点击录像模式的图形用户界面(如图8所示)中的超级稳定录像模式控件322的操作。
145.在本技术中,摄像模组1的对焦马达12能够支持摄像模组1实现自动对焦工作模式和超级稳定工作模式。下面结合附图对对焦马达12的具体结构进行描述。本技术以对焦马达12是音圈马达为例进行说明,但不能理解为对本技术实施例的限定。在其他一些实施例中,对焦马达12还可以是其他类型,例如记忆金属马达等,本技术实施例对此不作限定。
146.请参阅图10,图10是图3所示对焦马达12和镜头11在第一种实施例中的组装结构
示意图。在第一种实施例中,镜头11安装于对焦马达12中部,对焦马达12用于驱动镜头11沿平行于光轴10的方向移动。对焦马达12包括壳体121和支座122。示例性的,壳体121可以包括方形顶板和固定在其四周的四个方形侧板,顶板和四个侧板共同围设出壳体121的内腔,侧板固定于支座122的周缘。顶板中部设有沿光轴方向贯穿顶板的通孔120,镜头11可以通过通孔120部分伸出至壳体121外侧。
147.请参阅图11,图11是图10所示对焦马达12的部分分解示意图。对焦马达12包括固定部1201及可动部1202,可动部1202位于固定部1201内侧。镜头11安装于可动部1202,可动部1202能够相对于固定部1201移动,且移动方向平行于镜头11的光轴10。其中,如图11所示,固定部1201包括壳体121、磁路组件124、支座122及电路板123。电路板123可以安装于支座122的侧部。可动部1202中部设有沿平行于光轴10的方向贯穿的通孔1270,用于安装镜头11。
148.示例性的,请一并参阅图10及图11,电路板123至少部分收容于壳体121的内侧。电路板下方设有引脚1230,引脚1230背向可动部1202设置。引脚1230相对壳体121和底座122露出,用于使得电路板123与马达12外部电连接。
149.请结合参阅图11和图12,图12是图11所示对焦马达12部分结构的分解示意图。示例性的,固定部1201可以包括两组磁路组件124,两组磁路组件124彼此相对地位于支座122两侧,可动部1202位于两组磁路组件124之间。示例性的,磁路组件124可以由两个磁体组成。在其他一些实施例中,磁路组件124可以由一个磁体组成,也可以由三个以上的磁体组成,本技术实施例对此不作限定。
150.示例性的,如图12所示,可动部1202包括镜头支架127、对焦线圈1261及辅助线圈1262。其中,可动部1202可以包括两组线圈,每组线圈包括一个对焦线圈1261及一个辅助线圈1262。两组线圈可以以中心对称的方式、相对地设置在镜头支架127的两侧,为镜头支架127提供平衡的支撑力。可以理解的,两组线圈也可以以其他方式设置在镜头支架127的外侧,例如镜面对称的方式,本技术实施例对此不作严格限定。
151.示例性的,如图12所示,对焦马达12还包括簧片组件125及霍尔组件128。簧片组件125可以连接固定部1201与可动部1202,用于提供弹性力。簧片组件125可以包括上簧片1251及下簧片1252,上簧片1251及下簧片1252彼此间隔设置。在其他一些实施例中,簧片组件125也可以包括一个或三个以上数量的簧片,本技术对此不作严格限定。
152.霍尔组件128安装于固定部1201与可动部1202之间。霍尔组件128用于获得可动部1202的实际位置,电子设备100能够根据摄像模组1反馈的实际位置,对驱动信号进行调整,从而提高摄像模组1的自动对焦的精度。
153.请参阅图13,图13是图12所示支座122的结构示意图。其中支座122可以包括方形的底板1220及四个支柱1221。四个支柱1221分别固定于底板1220的四个角落。其中,底板1220与四个支柱1221可以为一体成型结构。
154.示例性的,如图13所示,底板1220中部设有沿光轴方向贯穿底板1220的通孔1270。通孔1270周围间隔设有四个支撑部1226。四个支撑部1226位于四个支柱与通孔1270之间。其中,底板1220与四个支撑部可以为一体成型结构。
155.请参阅图14,图14是图12所示下簧片1252的结构示意图。示例性的,下簧片1252可以包括两个部分,两个部分可以为对称结构。下簧片1252的其中一个部分可以包括半圆环
形的弹片1255和两个悬臂132,两个悬臂132分别固定连接在弹片1255的不同位置。单个悬臂132可以包括弹片脚1253及弯折件1254,弯折件1254连接在弹片1255与弹片脚1253之间。在其他一些实施例中,下簧片1252也可以为一体的结构,例如,下簧片1252可以包括圆环形的弹片和四个悬臂132,四个悬臂132分散地位于弹片的四周,且每个悬臂132的一端均固定连接弹片。本技术实施例不对下簧片1252的具体结构作严格限定。
156.示例性的,请参阅图15,图15是图13所示支座122与图14所示下簧片1252在一些实施例中的组装结构示意图。支座122的支柱1221面向通孔1270的一侧设有容置槽1223。容置槽1223的侧壁可以为弧面。下簧片1252的弹片脚1253置于容置槽1223。弹片脚1253的形状可以为半圆形,弹片脚1253的弧形轮廓可以贴合容置槽1223侧壁。在其他一些实施例中,容置槽1223的侧壁也可以包括多个依次连接的平面,本技术实施例对此不作严格限定。此时,弹片脚1253的形状可以依据侧壁形状作适应性变化,以使其外侧轮廓贴合容置槽1223侧壁。
157.示例性的,支柱1221靠近底板1220的底部设有凸台1225。凸台1225具有面向容置槽1223的限位面,弹片脚1253可以通过固定于限位面,以固定连接凸台1225。示例性的,凸台1225可以连接底板1220,以增加支柱1221与底板1220的连接强度。可以理解的,弹片脚1253也可以同时与容置槽1223的侧壁固定连接。在其他一些实施例中,支柱1221也可以不设置凸台1225,弹片脚1253固定连接容置槽1223的侧壁。本技术实施例对弹片脚1253与底座122的具体连接结构不作严格限定。
158.请参阅图16,图16是图12所示镜头支架127的另一个视角的结构示意图。图16所示镜头支架127所处视角相对图12所处视角进行了翻转。镜头支架127中部设有通孔1270,通孔1270沿平行于光轴10的方向贯穿镜头支架127。镜头支架127包括第一表面1273和固定于第一表面1273上的四个第一凸部1271。四个第一凸部1271彼此间隔地围绕通孔1270设置。镜头支架127背向通孔1270的侧壁上错开设有两个支撑件(1272、1275)。
159.示例性的,请参阅图17,图17是图16所示镜头支架127与图14所示下簧片1252在一些实施例中的组装结构示意图。其中下簧片1252的半圆环形的弹片1255与镜头支架127的第一表面1273固定连接,且位于第一表面1273上的四个第一凸部1271的内侧。下簧片1252的悬臂132与第一凸部1271交错设置。
160.请参阅图18,图18是图12所示上簧片1251的结构示意图。其中上簧片1251包括两个半圆环形的弹片1258。弹片1258上固定连接有悬臂131,悬臂131包括弹片脚1256及弯折件1257。弹片1258端部设有凸部1259。
161.请参阅图19,图19是图12所示镜头支架127的结构示意图。其中,镜头支架127还包括第二表面1274,第二表面1274背向第一表面1273设置。第二表面1274上设有八个沿第二表面1274的边缘间隔设置的第二凸部1275。在其他一些实施例中,第二表面1274上也可以设有其他数量个的第二凸部1275,本技术实施例对此不作严格限定。
162.示例性的,请参阅图20,图20是图19所示镜头支架127、图14所示下簧片1252与图18所示上簧片1251在一些实施例中的组装结构示意图。上簧片1251的弹片1258与镜头支架127的第二表面1274固定连接。上簧片1251的悬臂131设置为围绕通孔1270呈中心对称分布。上簧片1251的弹片1258位于第二表面1274上的八个第二凸部1275内侧,并且弹片1258端部的凸部1259位于相邻的两个第二凸部1275之间。第二凸部1275用于限定上簧片1251的
安装位置,提高安装精度、降低安装难度。
163.示例性的,上簧片1251及下簧片1252均包括两个形状相同的半圆环形弹片,每个弹片上均固定连接有对称设置的两个悬臂,使得簧片沿悬臂方向的弹性力相同,避免固定连接其上的镜头支架127倾斜和晃动,影响拍摄质量。
164.示例性的,请一并参阅图13及图21,图21是图20所示结构与图13所示支座122在一些实施例中的组装结构示意图。支座122的支柱1221背向底板1220的顶部设有凹槽1222,上簧片1251的弹片脚1256上设有安装孔1250。示例性的,可以采用螺钉穿过安装孔1250固定在凹槽1222内的方式,将上簧片1251与支柱1221固定连接。在其他一些实施例中,还可以通过铆接、粘接、焊接等方式将上簧片1251与支柱1221固定连接,本技术实施例对此不作严格限定。上簧片1251的弹片脚1256的形状可以与支柱1221的背向底板1220的顶面相同,使得弹片脚1256与支柱1221的顶面完全贴合,且连接牢固,在受到较大拉力时不易脱离。
165.示例性的,请一并参阅图16及图21,镜头支架127的第二表面1274背向支座122的底板1220设置,第一表面1273面向支座122的底板1220设置。请一并参阅图21和图22,图22是图21沿d-d处剖开的结构示意图。其中镜头支架127的第一凸部1271抵持支座122的底板1220上的支撑部1226。四个第一凸部1271一一对应地抵持四个支撑部。示例性的,四个第一凸部1271及四个支撑部均围绕通孔1270呈中心对称分布,使得支座122能够为镜头支架127提供平衡的支撑力,且镜头支架127能够更稳定地抵持在支座122上,不会晃动从而获得质量更高的图像。在其他一些实施例中,还可以设有其他数量的第一凸部1271和其他数量的支撑部1226;第一凸部1271和支撑部1226的数量也可以不同,本技术实施例对此不作限定,只要底座122能对镜头支架127提供支撑即可。
166.示例性的,请参阅图23,图23是图10所示对焦马达12部分结构的示意图。其中对焦线圈1261及辅助线圈1262可以套设在镜头支架127的支撑件(1272、1275)上,以固定于镜头支架127。示例性的,线圈也可以沿光轴方向缠绕在镜头支架127上。此时对焦线圈1261及辅助线圈1262可以沿平行于光轴10的方向上下排布,也可以沿垂直于光轴10的方向堆叠排布,本技术实施例对此不作严格限定。
167.示例性的,请一并参阅图23及图24,图24是图23所示结构沿c-c处剖开的示意图。对焦线圈1261及辅助线圈1262可以堆叠设置,有利于避免镜头支架127相对垂直于光轴10的平面产生倾角,导致镜头支架127晃动从而影响拍摄画面的质量。因此,可以通过灵活设计通入对焦线圈1261及辅助线圈1262电流的大小,控制镜头支架127的移动速度,使其适用于更多应用场景。在其他一些实施例中,对焦线圈1261及辅助线圈1262也可以错开设置,例如分别套设在支撑件1272和支撑件1275上,本技术实施例对此不作限定。在其他一些实施例中,镜头支架127上也可以设有其他数量的支撑件,例如一个或三个以上等,本技术实施例对此不作限定,只要能对线圈提供支撑即可。
168.示例性的,位于镜头支架127两侧的两组线圈中的设置方式可以相同,即每组线圈中对焦线圈1261及辅助线圈1262均为堆叠设置或错开设置。在其他一些实施例中,两组线圈的设置方式也可以不同,即其中一组线圈中对焦线圈1261及辅助线圈1262堆叠设置,另一组线圈中对焦线圈1261及辅助线圈1262错开设置,本技术实施例对此不做限定。
169.示例性的,请一并参阅图23及图25,图25是图23所示结构沿b-b处剖开的示意图。霍尔组件128包括霍尔磁铁1281及霍尔线圈1282。霍尔磁铁1281安装于镜头支架127,霍尔
线圈1282安装于电路板123上,霍尔磁铁1281及霍尔线圈1282相对设置。在其他一些实施例中,霍尔磁铁1281与霍尔线圈1282也可以错开设置,只要满足霍尔线圈1282处于霍尔磁铁1281的磁场中即可。
170.霍尔组件128用于检测镜头支架127的实际位置并进行反馈,从而提高摄像模组1的对焦精度。在其他一些实施例中,也可以不设置霍尔组件128,本技术实施例对此不作严格限定。
171.示例性的,霍尔磁铁1281可以安装于镜头支架127的安装槽1276内,能够减少对马达12内部空间的占用,使得马达12的内部结构更加紧凑,从而减小马达12的整体体积。在其他一些实施例中,霍尔磁铁1281也可以固定于镜头支架127的外侧,本技术实施例对此不做限定。
172.示例性的,请一并参阅图9及图26,图26是图10所示结构沿a-a处剖开的示意图。图26为对焦马达12的可动部1202处于底置位置时的结构示意图。镜头11安装于可动部1202的镜头支架127中部。对焦马达12的可动部1202下沉至底置位置时,也即可动部1202置底,可动部1202下沉至被允许的最低位置时,可动部1202抵持固定部1201。此时,镜头支架127的第一凸部1271抵持底座122的支撑部1226,镜头11处于其远焦位置。“远焦位置”为镜头11拍摄位于无限远的被拍摄物时的对焦位置。其中,被拍摄物与镜头11之间的距离大于十米,即可认为被拍摄物位于无限远的位置。镜头11处于“对焦位置”时,被拍摄物通过镜头11汇聚形成的成像面位于感光元件15的感光面上。
173.示例性的,簧片组件125连接固定部1201与可动部1202。簧片组件125用于在摄像模组1未通电时,将可动部1202稳定在底置位置。一些实施例中,上簧片1251和下簧片1252用于提供弹性力,可动部1202在弹性力的作用下靠近或稳定在底置位置。示例性的,当摄像模组1未通电时,上簧片1251和下簧片1252形变所产生的弹性力可以提供预压力,以将对焦马达12的可动部1202稳定在底置位置。具体地,在预压力的作用下,镜头支架127的第一凸部1271与支座122的支撑部1226之间存在相互作用力。也即支撑部1226受到第一凸部1271的压力,使得支座122在上簧片1251和下簧片1252的预压力的作用下,稳定在镜头支架127上。
174.在另一些实施例中,当摄像模组1未通电时,上簧片1251或下簧片1252中的一者可以发生形变产生弹性力,从而提供预压力,以将对焦马达12的可动部1202稳定在底置位置。上簧片1251或下簧片1252中的另一者可以不发生形变,本技术实施例对此不做限定。
175.此外,在非稳定环境中,上簧片1251和下簧片1252形变所产生的弹性力,有利于使镜头11克服惯性、保持在其远焦位置,获得清晰的拍摄效果。示例性的,当摄像模组1通电后,可动部1202离开底置位置,上簧片1251和下簧片1252发生形变产生弹性力,该弹性力用于使可动部1202回复至初始位置、以靠近底置位置。
176.在其他一些实施例中,对焦马达12的可动部1202处于底置位置时,镜头支架127的第一凸部1271与支座122的支撑部1226之间也可以接触,但不产生相互作用力,本技术实施例对此不作严格限定。
177.示例性的,请一并参阅图11及图26,上簧片1251及下簧片1252一端连接固定部1201的支座122,另一端连接可动部1202的镜头支架127,起到承载可动部1202的作用。此外,上簧片1251及下簧片1252产生的弹性力可以对可动部1202的移动起到缓冲作用,平衡
力矩,提高镜头11的稳定性。在一些实施例中,上簧片1251和/或下簧片1252可以采用导电材料,以为安装于镜头支架127上的线圈提供电流路径。
178.示例性的,磁路组件124固定于壳体121内侧,且与对焦线圈1261及辅助线圈1262相对设置。可以理解的,在磁路组件的磁场作用下,通电线圈中产生使其运动的安培力,安培力的大小和方向与通入电流的大小和方向有关。故而,在本实施例中,对焦线圈1261及辅助线圈1262通电后,产生使镜头支架127沿平行光轴10的方向运动的安培力,在安培力的作用下,镜头支架127带动镜头11运动。在其他一些实施例中,磁路组件124与线圈也可以错开设置,只要满足线圈处于磁路组件124的磁场中即可。
179.本技术还提供了对焦马达12的另一种实施例。请一并参阅图27、图28及图29,图27是图3所示对焦马达12在第二种实施例中的结构示意图,图28是图27所示对焦马达12的部分分解示意图,图29是图28所示对焦马达12部分结构的分解示意图。第二种实施例可以包括图10所示实施例的大部分特征,以下主要说明两者区别,两者相同的大部分内容不再赘述。
180.示例性的,对焦马达12包括固定部1201和可动部1202,可动部1202位于固定部1201内侧。镜头11安装于可动部1202,可动部1202能够相对于固定部1201移动,且移动方向平行于镜头10的光轴10。可动部1202能够在对焦线圈1261的带动下移动至底置位置、并保持在底置位置。可动部1202保持在底置位置时,可动部1202和镜头11相对固定部1201保持稳定,镜头11处于远焦位置。
181.示例性的,可动部1202包括镜头支架127、对焦线圈1261及辅助磁路组件1263。其中,镜头支架127背向通孔1270的外侧可以设有安装槽,辅助磁路组件1263安装于安装槽内。固定部1201包括辅助线圈1262及支座122,辅助线圈1262安装于支座122的底板1220上,且与辅助磁路组件1263相对设置。可以理解的,辅助磁路组件1263与辅助线圈1262的安装位置可以互换,即辅助线圈1262安装于镜头支架127外侧,辅助磁路组件1263安装于底板1220上。在其他一些实施例中,辅助磁路组件1263与辅助线圈1262也可以错开设置,只要满足辅助线圈1262处于辅助磁路组件1263的磁场中内即可。
182.示例性的,辅助线圈1262的数量可以为一个或多个,本技术实施例对此不作严格限定。例如对焦马达12包括两个辅助线圈1262。两个辅助线圈1262安装于电路板123上,且围绕通孔1270呈中心对称分布。此外,辅助磁路组件1263包括两个磁体,且围绕通孔1270呈中心对称分布。在本实施例中,两个辅助线圈1262中心对称分布、两个磁体中心对称分布,辅助线圈1262与磁体相对设置,使得通电后的辅助线圈1262能够提供平衡的安培力,镜头支架127在安培力的作用下平稳移动,减少安装于镜头支架127上的镜头11的晃动,以提升拍照质量。在其他一些实施例中,辅助磁路组件1263也可以包括一个或三个以上数量的磁体,本技术实施例对此不作严格限定。
183.其中,辅助线圈1262可以直接固定于底板1220,也可以通过中间媒介、间接地固定于底板1220。示例性的,电路板123位于支座122与镜头支架127之间,且固定于支座122的底板1220上。辅助线圈1262固定于电路板123。电路板123包括多个引脚1230,用于与对焦马达12外部实现电连接。
184.请参阅图30,图30是图29所示电路板123的结构示意图。其中,电路板123包括主体件1231及连接件1232。主体件1231中部设有沿平行于光轴10的方向贯穿主体件1231的通孔
1270。主体件1231还设有四个沿平行于光轴10的方向贯穿主体件1231的装配孔1233,装配孔1233围绕通孔1270间隔设置。连接件1232包括多个背向可动部1202设置的引脚1230。辅助线圈1262安装于电路板123的主体件1231上。
185.示例性的,请参阅图31,图31是图29所示支座122与图30所示电路板123在一些实施例中的组装结构示意图。电路板123的主体件1231上的装配孔1233用于避让底板1220上的支撑部1226,使得主体件1231能够贴合底板1220。支座122的四个支柱靠近底板1220的底部均设有挡板1227,用于限定主体件1231的安装位置,提高装配精度。底板1220的侧部设有安装槽1224,电路板123的连接件1232置于安装槽1224内。如图27所示,电路板123的连接件1232上的引脚露出至摄像模组1的外部。
186.本技术还提供了对焦马达12的再一种实施例。请参阅图32,图32是图3所示对焦马达12在第三种实施例中的内部示意图。第三种实施例可以包括第一种实施例的大部分特征,以下对第三实现方式进行简要说明,第三实现方式与第一实现方式相同的大部分内容不再赘述。
187.对焦马达12包括固定部1201和可动部1202,可动部1202位于固定部1201内侧。镜头11安装于可动部1202,可动部1202能够相对于固定部1201移动,且移动方向平行于镜头10的光轴10。可动部1202能够在对焦线圈1261的带动下移动至底置位置并保持在底置位置。可动部1202保持在底置位置时,可动部1202和镜头11相对固定部1201保持稳定,镜头11处于远焦位置。
188.固定部1201包括壳体121、磁路组件124、支座122及电路板123。可动部1202包括镜头支架127及对焦线圈1261。镜头1安装于镜头支架127的中部,对焦线圈1261安装于镜头支架127的外侧,对焦线圈1261处于磁路组件124的磁场中。
189.其中,对焦马达12包括对焦线圈1261,且通过对焦线圈1261实现对焦马达12的功能。本实现方式与第一实现方式的主要区别在于,对焦马达12不设置辅助线圈。
190.本技术还提供了一种镜头控制方法,用于实现电子设备100的自动对焦功能和超级稳定录像功能。镜头控制方法可以用于包括对焦马达12的电子设备100,对焦马达12可以具有本技术中提供的三种实施例中任一种的结构。可以理解的,镜头控制方法还可以用于包括其它结构的对焦马达的电子设备100,本技术对此不作严格限定。下面结合电子设备100的结构、对电子设备100的自动对焦功能和超级稳定录像功能的实现过程进行描述。
191.在本实施例中,镜头控制方法能够使电子设备100实现自动对焦功能和超级稳定录像功能。如图2所示,电子设备100包括摄像模组1和处理器7,处理器7电连接摄像模组1。如图10至图32所示的摄像模组1的三种实施例,摄像模组1包括对焦马达12和镜头11,对焦马达12包括固定部1201和可动部1202,镜头11安装于可动部1202,可动部1202能够相对固定部1201移动,可动部1202下沉至底置位置时,可动部1202抵持固定部1201,且镜头11处于远焦位置。
192.示例性的,镜头控制方法包括:摄像模组1响应于自动对焦驱动信号,控制可动部1202带动镜头11沿平行于光轴10的方向移动。此时,摄像模组1处于自动对焦工作模式,电子设备100处于拍照模式、录像模式等模式中,电子设备100能够实现自动对焦功能。
193.镜头控制方法还包括:摄像模组1响应于超级稳定驱动信号,控制可动部1202移动至底置位置,且保持在底置位置。此时,摄像模组1处于超级稳定工作模式,电子设备100处
于超级稳定录像模式中,电子设备100能够实现超级稳定录像功能。
194.在本实施例中,镜头控制方法能够使摄像模组1控制镜头11沿光轴方向移动至其对焦位置,从而使电子设备100实现正常的自动对焦。此外,镜头控制方法能够使摄像模组1控制可动部1202下沉至底置位置且保持在底置位置,使得可动部1202相对于固定部1201保持静止,镜头11能够克服惯性稳定在其远焦位置,实现类似于定焦马达的超稳定效果,故而,即使处于非稳定的拍摄环境中,处于超级稳定录像模式的电子设备100也可以拥有高质量的拍摄效果。
195.其中,摄像模组1实现自动对焦工作模式的方法和实现超级稳定工作模式的方法可以有多种,具体方法根据摄像模组1的具体结构进行设计。
196.示例性的,本技术提供了一种摄像模组1(参阅图10至图26所示的第一种实施例),包括固定部1201及可动部1202。固定部1201包括磁路组件124,可动部1202包括对焦线圈1261及辅助线圈1262。对焦线圈1261及辅助线圈1262处于磁路组件124的磁场中。
197.具体地,摄像模组1控制可动部1202带动镜头11沿光轴10方向移动的过程包括:为对焦线圈1261提供第一电流,以使可动部1202带动镜头11移动至对焦位置。摄像模组1控制可动部1202移动至底置位置的过程包括:为对焦线圈1261提供第二电流,和/或为辅助线圈1262提供第三电流,以使可动部1202移动至底置位置;摄像模组1控制可动部1202保持在底置位置的过程包括:为对焦线圈1261提供第四电流,和/或为辅助线圈1262提供第五电流,以使可动部1202保持在底置位置。
198.在本实施例中,摄像模组1处于自动对焦工作模式时,可动部1202在对焦线圈1261的安倍力作用下,能够沿光轴方向移动,并带动镜头11移动至其对焦位置,使电子设备100实现自动对焦功能。摄像模组1处于超级稳定工作模式时,可动部1202在对焦线圈1261及辅助线圈1262的安培力的共同作用下保持在底置位置上,使电子设备100实现超级稳定录像功能,从而获得清晰的拍摄效果。
199.示例性的,摄像模组1的簧片组件125还可以用于,在摄像模组1未通电时,将可动部1202稳定在底置位置。在本实施例中,摄像模组1通电时,簧片组件125提供预压力,可动部1202在簧片组件125的预压力、对焦线圈1261及辅助线圈1262的安培力的共同作用下保持在底置位置上。
200.示例性的,本技术还提供了另一种摄像模组1(参阅图27至图31所示的第二种实施例),包括固定部1201及可动部1202。固定部1201包括磁路组件124和辅助线圈1262,可动部1202包括对焦线圈1261及辅助磁路组件1263。对焦线圈1261处于磁路组件124的磁场中,辅助线圈1262处于辅助磁路组件1263的磁场中。
201.具体地,摄像模组1控制可动部1202带动镜头11沿光轴10方向移动的过程包括:为对焦线圈1261提供第一电流,以使可动部1202带动镜头11移动至对焦位置。摄像模组1控制可动部1202移动至底置位置的过程包括:为对焦线圈1261提供第二电流,和/或为辅助线圈1262提供第三电流,以使可动部1202移动至底置位置;摄像模组1控制可动部1202保持在底置位置的过程包括:为对焦线圈1261提供第四电流,和/或为辅助线圈1262提供第五电流,以使可动部1202保持在底置位置。
202.在本实施例中,摄像模组1处于自动对焦工作模式时,可动部1202在对焦线圈1261的安倍力作用下,能够沿光轴方向移动,并带动镜头11移动至其对焦位置,使电子设备100
实现自动对焦功能。摄像模组1处于超级稳定工作模式时,可动部1202在对焦线圈1261及辅助线圈1262的安培力的共同作用下保持在底置位置上,使电子设备100实现超级稳定录像功能,从而获得清晰的拍摄效果。
203.示例性的,摄像模组1的簧片组件125还可以用于,在摄像模组1未通电时,将可动部1202稳定在底置位置。在本实施例中,摄像模组1通电时,簧片组件125提供预压力,可动部1202在簧片组件125的预压力、对焦线圈1261及辅助线圈1262的安培力的共同作用下保持在底置位置上。
204.示例性的,本技术还提供了再一种摄像模组1(参阅图32所示的第三种实施例),包括固定部1201及可动部1202。固定部1201包括磁路组件124,可动部1202包括对焦线圈1261。对焦线圈1261处于磁路组件124的磁场中。
205.具体地,摄像模组1控制可动部1202带动镜头11沿光轴10方向移动的过程包括:为对焦线圈1261提供第一电流,以使可动部1202带动镜头11移动至对焦位置。摄像模组1控制可动部1202移动至底置位置的过程包括:为对焦线圈1261提供第二电流,以使可动部1202移动至底置位置;摄像模组1控制可动部1202保持在底置位置的过程包括:为对焦线圈1261提供第三电流,以使可动部1202保持在底置位置。
206.在本实施例中,摄像模组1处于超级稳定工作模式时,可动部1202在簧片组件125的预压力及对焦线圈1261的安培力的共同作用下保持在底置位置上。可以理解的,簧片组件125也可以不提供预压力,也即摄像模组1处于超级稳定工作模式时,可动部1202在对焦线圈1261的安培力的作用下保持在底置位置上。
207.此外,在本实施例中,摄像模组1通过对焦线圈1261带动可动部1202运动,即可使得电子设备100实现自动对焦功能及超级稳定录像功能,相较于前两种实施例,省去了辅助线圈1262等结构,简化了驱动信号,并降低了功耗及发热量。
208.以下通过举例说明电子设备100实现自动对焦功能和超级稳定录像功能的具体过程。其中,电子设备100实现自动对焦功能的方法和实现超级稳定功能的方法可以有多种,具体方法可以根据摄像模组1的具体结构进行设计。
209.示例性的,请参阅图33,图33是镜头控制方法实现电子设备100的自动对焦功能的流程示意图。其中,电子设备100的摄像模组可以采用如图10至图26所示的第一种实施例、如图27至图31所示的第二种实施例以及如图32所示的第三种实施例的结构,摄像模组还包括驱动芯片,驱动芯片电连接对焦线圈1261。
210.电子设备100实现自动对焦功能的镜头控制方法包括:
211.s01:处理器7响应于自动对焦指令,发送被摄对象获取信号至摄像模组1。
212.s02:摄像模组1响应于被摄对象获取信号,获取被摄对象信息,并将被摄对象信息发送至处理器7。
213.s03:处理器7根据被摄对象信息确定镜头11的对焦位置,形成能够驱动镜头11移动至对焦位置的自动对焦驱动信号,并将自动对焦驱动信号发送至摄像模组1的驱动芯片。
214.s04:摄像模组1的驱动芯片依据自动对焦驱动信号、向摄像模组1的对焦线圈1261提供第一电流。
215.s05:通入第一电流的对焦线圈1261控制可动部1202带动镜头11沿平行于光轴10的方向移至对焦位置。
216.具体地,通入第一电流的对焦线圈1261在安培力的作用下,能够克服簧片组件125的弹性力沿平行于光轴10的方向移动,并带动对焦马达12的可动部1202移动。安装于可动部1202上的镜头11也会沿平行于光轴10的方向移动,并在第一电流产生的安培力的作用下移动到对焦位置。其中,第一电流的大小及方向能够控制安培力的大小和方向,从而控制可动部1202的移动位移以及速度等参数。
217.s06:通过霍尔组件128获得可动部1202的实际位置,并将可动部1202的实际位置发送至处理器7。
218.s07:处理器7将实际位置与对焦位置进行对比,判断两者是否重合,也即镜头11是否移动到预设的对焦位置。
219.具体地,若实际位置与对焦位置重合,说明此时镜头11已经移动至预设的对焦位置,则结束自动对焦;若实际位置与对焦位置未重合,说明镜头11未移动至预设的对焦位置,则根据可动部1202的实际位置,形成能够驱动镜头11移动至预设的对焦位置的自动对焦驱动信号,并将自动对焦驱动信号发送至摄像模组1的驱动芯片。再次执行步骤s04至s07,如此循环进行,直至实际位置与对焦位置重合,也即镜头11移动至预设的对焦位置,则结束自动对焦程序。
220.请参阅图34,图34是镜头控制方法实现电子设备100的超级稳定录像功能的流程示意图。其中,电子设备100的摄像模组可以采用如图10至图26所示的第一种实施例以及如图27至图31所示的第二种实施例的结构。
221.电子设备100实现超级稳定录像功能的镜头控制方法包括:
222.s11:处理器7响应于超级稳定录像指令,并发送超级稳定驱动信号至摄像模组1的驱动芯片。
223.s12:摄像模组1的驱动芯片依据超级稳定驱动信号向对焦线圈1261和辅助线圈1262提供电流。
224.s13:通电后的对焦线圈1261和辅助线圈1262带动可动部1202移动至底置位置并保持在底置位置。
225.具体地,在步骤s12中,驱动芯片向对焦线圈1261提供第二电流,向辅助线圈1262提供第三电流,通入第二电流的对焦线圈1261和通入第三电流的辅助线圈1262带动可动部1202移动至底置位置。之后驱动芯片向对焦线圈1261提供第四电流,向辅助线圈1262提供第五电流,通入第四电流的对焦线圈1261和通入第五电流的辅助线圈1262控制可动部1202保持在底置位置。
226.其中,第二电流与第三电流的大小可以相同,第四电流与第五电流的大小可以相同,第二电流可以大于第四电流。通入第四电流的对焦线圈1261用于控制可动部1202保持在底置位置,使用较小的电流能够降低功耗,同时减少线圈发热量,降低发热量对镜头11透镜的影响。在其他一些实施例中,第二电流和第四电流的大小可以相同,本技术实施例对此不作限定。
227.在其他一些实施例中,第二电流和第三电流的大小可以不同。例如第二电流大于第三电流,通入第二电流的对焦线圈1261作为主驱动部件带动可动部1202移动至底置位置。在其他一些实施例中,可以通过调节第三电流的大小来控制可动部1202的移动速度,本技术实施例对此不作严格限定。
228.在其他一些实施例中,第四电流和第五电流的大小可以不同。例如当电子设备100检测到剧烈晃动时,增大第五电流,从而使得可动部1202稳定在底置位置。在其他一些实施例中,第五电流也可以是瞬时脉冲电流,本技术实施例对此不作严格限定。
229.在其他一些实施例中,驱动芯片可以仅向对焦线圈1261提供第二电流和第四电流,可动部1202由对焦线圈1261带动,向底置位置移动并保持在底置位置。
230.在其他一些实施例中,电子设备100的摄像模组也可以采用如图32所示的第三种实施例的结构。对应于第三种实施例的摄像模组,电子设备100实现超级稳定录像功能的镜头控制方法可以参阅前文实施例,两者主要区别在于步骤s12,在本实施例中,步骤s12可以是:驱动芯片向对焦线圈1261提供第二电流,通入第二电流的对焦线圈1261带动可动部1202移动至底置位置。之后驱动芯片向对焦线圈1261提供第三电流,通入第三电流的对焦线圈1261控制可动部1202保持在底置位置。
231.在本技术的一些实施例中,摄像模组1还可以具有光学防抖工作模式,电子设备100还可以实现光学防抖功能。其中,摄像模组1还可以包括防抖马达。防抖马达用于驱动镜头11在垂直于光轴10的方向上移动,或相对光轴10倾斜转动。防抖马达可以是记忆金属式(shape memory alloy)马达、悬丝式马达以及滚珠式马达等。可以理解的,摄像模组1可以只包括对焦马达12,也可以同时包括对焦马达12和防抖马达,本技术实施例对此不作严格限定。
232.请参阅图35,图35是图2所示摄像模组1在其他一些可能实施例中的部分结构示意图。示例性的,摄像模组1包括壳体35、防抖马达及对焦马达12。防抖马达收容于壳体35的内侧中,防抖马达包括悬丝31、防抖固定部及防抖可动部。镜头11安装于对焦马达12上,对焦马达12安装于防抖可动部,且防抖可动部可相对于防抖固定部移动或转动。防抖可动部包括防抖线圈33,防抖固定部包括防抖磁路组件32。悬丝31的一端固定连接防抖固定部,一端固定连接防抖可动部。悬丝31用于支撑防抖可动部,并使其悬浮于壳体35的内侧。防抖线圈33能够在通电后,产生使防抖可动部移动或转动的安培力,从而带动镜头11运动,以补偿在非稳定环境下拍摄时、镜头11因惯性产生的抖动,从而提高拍摄质量。
233.可以理解的,本技术提供的对焦马达12的结构可以采用如图10至图32所示的三种实施例中的对焦马达12实现,也可以由具有其他结构的对焦马达实现,本技术对此不作严格限定。
234.示例性的,镜头控制方法还包括:摄像模组1响应于自动防抖驱动信号,控制防抖可动部带动镜头11、相对防抖固定部移动或转动,以补偿在非稳定环境下拍摄时、镜头11因惯性产生的抖动,从而获得高质量的图像。
235.其中,电子设备100能够同时实现自动对焦功能和光学防抖功能。此时,摄像模组1既处于自动对焦工作模式,也处于光学防抖工作模式。自动防抖驱动信号的形成条件或场景,可以参阅前文中自动对焦驱动信号的相关描述,此处不再赘述。
236.本技术还提供一种电子设备,包括处理器和存储器,处理器耦合存储器。存储器用于存储计算机程序代码,计算机程序代码包括计算机指令,当处理器执行计算机指令时,电子设备执行本技术所提供的上述镜头控制方法。
237.本技术还提供一种计算机存储介质,包括计算机指令,当计算机指令在电子设备上运行时,电子设备执行本技术所提供的上述镜头控制方法。
238.本技术还提供一种计算机程序产品,当其在计算机上运行时,计算机执行本技术所提供的上述镜头控制方法。
239.以上描述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内;在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1