为自主地面和空中载具优化的集成光子光学陀螺仪的制作方法
1.本公开内容涉及将集成的基于光子的光学陀螺仪集成到自主车辆中。
背景技术:
2.陀螺仪(有时也称为“陀螺”)是可以测量角速度的传感器。陀螺仪可以是机械的或光学的,并且可以在精度、性能成本和尺寸方面有所不同。基于科里奥利(coriolis)效应的机械陀螺仪通常成本较低,但无法提供非常高的性能,并且容易受到温度、振动和电磁干扰(electromagnetic interference,emi)引起的测量误差的影响。光学陀螺仪通常具有最高的性能,并且依赖于基于萨格纳克(sagnac)效应(干涉测量中遇到的一种由旋转引起的现象)的干涉测量。由于光学陀螺仪没有任何移动零件,因此它们比机械陀螺仪更具有优势,因为它们比带有移动零件的机械陀螺仪更能承受冲击、振动和温度变化的影响。
3.最常见的光学陀螺仪是光纤陀螺仪(fiber optical gyroscope,fog)。fog的构造通常涉及保偏(polarization-maintaining,pm)纤维的长回路(所述回路可以构成包括几匝的线圈)。激光从不同方向发射到pm纤维的两端。如果纤维回路/线圈在移动,那么光束彼此之间会经历不同的光路长度。通过建立干涉测量系统,可以测量与封闭回路的面积和旋转线圈的角速度成正比的微小路径长度差。
4.fog可以具有非常高的精度,但同时,它们尺寸大,非常昂贵,并且由于装置基于需要精确对准的分立光学部件来构建而难以组装。通常涉及手动对准,这很难按比例放大以进行批量生产。本公开内容提供了这个问题的解决方案,如下文进一步描述。
5.多个陀螺仪和其他传感器(例如,加速度计,在某些情况下还包括磁力计)可以封装在一起作为移动物体中的惯性测量单元(inertial measurement unit,imu),以感测沿x、y和z轴的各种运动参数。例如,6轴imu可能具有封装在一起的3轴加速度计和3轴陀螺仪,以测量移动物体的绝对空间位移。imu的应用包括但不限于军事演习(例如,通过战斗机、潜艇)、商用飞机/无人机导航、机器人、自主车辆导航、虚拟现实、增强现实、游戏等。
6.对于导航应用,imu可以是惯性导航系统(inertial navigation system,ins)的一部分,所述惯性导航系统(ins)可以由全球导航卫星系统(global navigation satellite system,gnss)提供的导航数据辅助,例如全球定位系统(global positioning system,gps)、glonass、伽利略(galileo)、北斗(beidou)等。gnss辅助式ins接收器使用复杂的融合算法,通过结合来自各种本地物理传感器的数据和从gnss获得的数据,为移动物体提供准确的位置、速度和定向。然而,当gnss信号缺失或变弱时,例如,当汽车在隧道或城市峡谷中时,来自本地物理传感器的数据成为使用替代算法(诸如,航位推算(dead reckoning,dr))进行准确位置预测的唯一来源。具有dr能力的接收器使用来自陀螺仪、加速度计、里程计、轮速传感器等的数据,以便基于最后的已知位置来预测移动物体的即将到来的位置和移动方向(航向)。
7.imu中一个感兴趣的参数是角度随机游走(angle random walk,arw),它是描述当陀螺仪信号在有限时间量内积分以计算移动物体的角运动时发生的平均偏差或误差的噪
声参数。这个误差是dr算法的关键组成部分。通常,低偏差稳定性值对应于低arw,以及低偏差估计误差。例如,偏差稳定性为0.5
°
/hr的陀螺仪的arw通常为0.02-0.05
°
/√hr,这是fog等高性能陀螺仪的特征。另一方面,低性能机械陀螺仪(例如,基于微机电系统(micro-electro-mechanical system,mems)的陀螺仪)可能具有高得多的arw和偏差稳定性值(例如,0.3
°
/√hr的arw和3.5
°
/hr或更高的较高偏差稳定性值)。陀螺仪测量中的高偏差估计误差可能会使数据变得毫无意义,尤其是当传感器还经历热变化时。例如,mems陀螺仪的偏差估计误差可能在100
°
/hr甚至高达1000
°
/hr的范围内。1000
°
/hr范围内的大的热误差使得准确度低于100
°
/hr的基于陀螺仪的偏差估计变得不切实际。
技术实现要素:
8.本文公开的新型小尺寸集成光学陀螺仪可以提供低于0.5
°
/hr的偏差稳定性和在0.05
°
/√hr或以下(例如,低至0.01
°
/√hr)范围内的arw,这使得它们就性能而言可与fog相当,但成本却低得多。集成光学陀螺仪可以基于硅光子,缩写为siphogtm(硅光子光学陀螺仪),虽然基于化合物半导体(iii-v半导体)的集成光学陀螺仪也在本公开内容的范围内。此外,如下所述,集成光学陀螺仪可以具有由集成光子制成的前端芯片,所述芯片可以发射和接收来自旋转传感元件的光。光学陀螺仪的旋转传感元件可以包括光纤回路或另一个集成光子波导芯片(例如,基于氮化硅波导的线圈或微谐振器环)。使用集成光学陀螺仪时可用的低偏差估计误差(在1.5
°
/hr范围内甚至更低)对于安全关键型应用至关重要,例如计算自主车辆、无人机等的航向。应注意,“自主车辆”一词涵盖能够以半自主或完全自主模式驾驶的陆地、空中或海上载具,虽然一些具体说明性示例是关于自主陆地载具进行描述的。
9.集成光子光学陀螺仪具有两个主要部件。第一部件是集成光子芯片(例如,在硅光子光学陀螺仪的情况下为“siph芯片”或“集成siph芯片”),其设计考虑了更高级系统架构和关键性能参数,包括但不限于激光性能、调谐参数、检测器参数以及封装注意事项。这个芯片包含激光器、移相器、检测器、分光器等。第二部件是基于波导的光学陀螺仪芯片(“og芯片”或“陀螺芯片”或“传感芯片”),这个芯片具有波导线圈或环谐振器。波导可由氮化硅形成(sin)。因此,基于sin波导的og芯片也被称为“sin波导芯片”或简称为“sin芯片”。在一个实施方式中,og芯片与集成光子芯片混合集成。在一些先进的实施方式中,集成光子芯片与og芯片可以单片地制造在同一芯片上或通过晶片接合堆叠。陀螺仪芯片中的低波导损耗是获得所需陀螺仪灵敏度值的关键,所述灵敏度值与较低的偏差估计误差相关。
10.集成光子光学陀螺仪可以使用标准拾取和放置技术在印刷电路板(printed circuit board,pcb)上模块化(例如,siph芯片和og芯片可以封装在一起)。pcb还可能具有集成光子芯片的控制电子器件,并且可以与支持imu主要架构的主板集成。模块化设计允许将相同的光学陀螺仪产品引入为不同市场定制的不同imu pcb,因为光学陀螺仪模块的形状因数保持不变。一个这类市场是用于自主车辆的自动驾驶辅助系统(automated driver assistance system,adas),但是本领域技术人员将理解本公开内容的范围不仅限于adas。晶片级处理和标准ic封装和组装技术能够为各种市场(包括商业和军事应用)的各种系统架构大规模批量制造光学陀螺仪模块。
附图说明
11.通过以下给出的详细描述以及根据本公开内容的各种实施方式的附图,将更充分地理解本公开内容。应注意,图中所示尺寸仅用于说明目的,并非按比例绘制。
12.图1图示了根据本公开内容的实施方式的单轴siphog模块的主要部件。
13.图2图示了图1所示的单轴siphog的透视示意图。
14.图3图示了根据本公开内容的实施方式的具有单轴siphog的imu的印刷电路板(pcb)的示意图。
15.图4图示了根据本公开内容的实施方式的封装在一起以实现3轴陀螺仪的三个单轴siphog的示意图。
16.图5图示了根据本公开内容的实施方式的3轴光学陀螺仪的实施方式的示意图,所述陀螺仪包括用于两个附加轴的两个附加单轴siphog,所述两个附加单轴siphog封装在上面已经附接有单轴siphog的pcb上。
17.图6a图示了根据本公开内容的实施方式的第一siphog配置的管芯布局。
18.图6b图示了根据本公开内容的实施方式的第二siphog配置的管芯布局。
19.图6c图示了根据本公开内容的实施方式的第三siphog配置的管芯布局。
20.图6d示意性地图示了根据本公开内容的实施方式的管芯堆叠概念。
21.图6e示意性地进一步图示了根据本公开内容的实施方式的管芯堆叠概念。
22.图7a图示了根据本公开内容的实施方式的在用于单轴角度测量的siphog模块中建立冗余的第一种方式。
23.图7b图示了根据本公开内容的实施方式的在用于单轴角度测量的siphog模块中建立冗余的第二种方式。
24.图8a图示了示出根据本公开内容的实施方式的具有6轴mems模块和单轴siphog模块的6轴混合惯性测量单元(imu)的部件的框图。
25.图8b图示了示出根据本公开内容的实施方式的具有6轴mems模块和针对相同轴具有两个单轴siphog模块以实现冗余的6轴混合惯性测量单元(imu)的部件的框图。
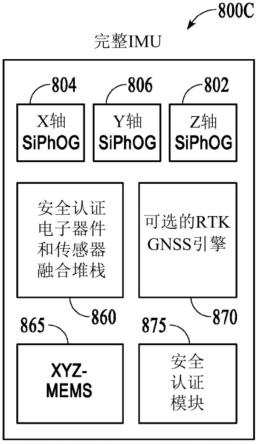
26.图8c图示了示出根据本公开内容的实施方式的具有6轴mems模块和针对三个不同轴具有三个单轴siphog模块的6轴混合imu的部件的框图。
27.图9图示了根据本公开内容的实施方式的混合imu模块的硬件架构。
具体实施方式
28.本公开内容的各方面涉及紧凑型超低损耗的基于波导的光学陀螺仪模块与其他系统级电子部件的集成,以产生高性能惯性测量单元(imu)。系统集成是在考虑大规模制造的情况下完成的,以促进集成光子光学陀螺仪(例如,siphog)的大规模生产。应注意,虽然“siphog”一词已经贯穿整个说明书中普遍使用,它是加利福尼亚州圣克拉拉市anello photonics(anello photonics,santa clara,california)的注册商标。
29.一些传感应用可能需要仅用于一个轴的高精度光学陀螺仪,以补充或替代低成本机械陀螺仪(例如,基于微机电系统(mems)的陀螺仪)的低精度测量,而其他两个轴可能会继续使用低成本机械陀螺仪的低精度测量。一个这类例子是自动驾驶辅助系统(adas)依赖的安全传感器中的陀螺仪,用于当前和未来几代自主车辆,尤其是2.5级/3级(l2.5/l3)市
optical gyroscopes with mode-selective waveguides”的临时申请62/904,443中涵盖了siph芯片与sin芯片的系统级集成,这些申请通过引用并入本文。应注意,除了所述申请中描述的内容之外,对于内置冗余,两个单独sin芯片可以耦接到具有两组集成光子部件的单个siph芯片。或者,单个sin芯片中的第二层可用于内置冗余,即两个完整的波导线圈可用于耦接到siph芯片。这些冗余概念在图7a和图7b中进行了说明。
36.图2图示了单轴siphog模块100的透视示意图。应注意,虽然未按比例绘制,但sin芯片110可能基本上比siph芯片大,并且可能决定siphog模块100的总形状因数。应注意,封装基板105可以在背表面具有附加电路,并且可以具有指定的接合焊盘以附接到更大模块(例如,imu)的另一个封装基板。
37.图3图示了根据本公开内容的实施方式300的具有单轴siphog模块100的imu的印刷电路板(pcb)305的示意图。pcb 305可以具有处理器330以处理来自siphog 100的数据以及由imu接收的其他信号/数据(例如,加速度计数据、gnss数据、机械陀螺仪数据)。处理器330可以具有可以与数字信号处理器(digital signal processor,dsp)结合的中央处理单元(central processing unit,cpu)。此外,其他ic 332可以在同一pcb上。siphog模块100可以通过倒装芯片接合或其他标准封装技术来组装在pcb 305上。当siphog模块仅用于一个轴时,pcb 305上的一些ic 332可以是用于其他轴的mems陀螺仪。此外,6轴mems装置可以与提高仅一个轴(例如,偏航轴)的角度测量精度的siphog模块100一起封装在pcb上。
38.图4图示了根据本公开内容的实施方式400的封装在一起的是三个单轴siphog模块的示意图。实施方式400可以具有三维外壳450以分别附接z、x和y轴的三个siphog模块100a、100b和100c。
39.图5图示了3轴光学陀螺仪的另一个实施方式500的示意图,所述3轴光学陀螺仪包括一起封装在pcb上的两个附加的单轴siphog,所述pcb上已经附接有单轴siphog(例如,如实施方式300中所示)。实施方式500可以是混合imu的一部分,其中pcb 305具有处理器330并且可选地具有6轴mems装置(未示出)。z轴的siphog 100a可以组装在pcb 305上,而另外两个竖直面板550可以与pcb 305附接,使得来自siphog 100b和100c的数据通过pcb 305路由到处理器330。
40.通常,陀螺仪灵敏度值越低,物体针对已知速度的角漂移越低。陀螺仪灵敏度取决于与陀螺仪相关联的物理尺寸而变化。光学陀螺仪的相位信号与萨格纳克效应乘以角旋转速度成正比,如下式所示:
41.δφ=(8πna/λc)ω
42.其中n=陀螺仪的匝数,
43.a=封闭面积,
44.ω=角旋转速度,
45.δφ=光相位差信号,
46.λ=光的波长,
47.c=光速。
48.例如,可以容纳在单个管芯(如图6a中所示)内的较小波导线圈(具有较小封闭面积'a')可以具有较高的陀螺仪灵敏度值。但是使用较大管芯(例如,图6b中所示的四方管芯)可以获得低得多的陀螺仪灵敏度值,这表明陀螺仪性能更好。单个管芯的尺寸可以是
multi-layer structures for integrated silicon photonics optical gyroscopes”的美国专利申请号16/894,120和2020年9月17日提交的标题为“chemical-mechanical polishing for fabricating integrated photonics optical gyroscopes”的美国临时专利申请号63/079,928中描述了这两种配置的制造过程,这两个申请均以引用方式并入本文。
54.图7a图示了将冗余并入siphog模块的一种方式。siph芯片720可以具有两个相同的集成光子部件724a和724b,分别耦接到sin波导芯片710a和710b。每个集成光子部件包括耦接到集成光子部件的激光器。例如,激光器726a耦接到集成光子部件724a,并且激光器726b耦接到集成光子部件724b。激光器和集成光子部件可以一起封装在共同的基板上(例如,722a和722b)。在一些实施方式中,激光器被单片地集成在集成光子部件上。集成光子部件724a具有输入波导端728a,输入波导端728a可以是喇叭形的(或锥形的)以更好地与激光器726a模式匹配。附加光学部件可以包括2x2分路器730a和732a、相位调制器734a和736a以及检测器742a、744a和745a。两个输出波导端738a和740a可以是锥形的,以便更好地耦接到sin波导芯片710a中。检测器742a可以充当从sin芯片710a接收光学相位差信号的sagnac检测器,角旋转速度从所述信号导出。检测器可以是pin二极管、基于波导的检测器或雪崩光电二极管(apd)。在2019年7月10日提交的标题为“system architecture for silicon photonics optical gyroscopes”的共同未决申请62/872,640和2019年9月23日提交的标题为“system architecture for silicon photonics optical gyroscopes with mode-selective waveguides”的共同未决申请62/904,443中详细描述了集成光子部件724a和724b中的波导设计。集成光子部件724b的各个元件在功能上与集成光子部件724a的相应标记的元件相同。
55.图7b图示了将冗余并入siphog模块的另一种方式,其中两层760a和760b通过晶片接合在同一sin芯片710中堆叠以容纳两个波导线圈或可以通过标准晶片处理生长。两个波导线圈中的每一个都可以分布在两层760a与760b之间(即代替图6e中所示的一个波导线圈,存在两个波导线圈),或者,每个波导线圈可能已容纳在其自己的相应层中。有关详细描述,请参考2020年6月5日提交的标题为“single-layer and multi-layer structures for integrated silicon photonics optical gyroscopes”的美国专利申请号16/894,120。
56.图8a图示了示出根据本公开内容的实施方式的具有6轴mems模块和单轴siphog模块的6轴混合惯性测量单元(imu)的部件的框图。图8b图示了用于单轴测量中的冗余的附加单轴siphog模块(其他一切与图8a相同)。图8c图示了示出根据本公开内容的实施方式的具有6轴mems模块和三个单轴siphog模块的6轴混合imu的部件的框图。单轴siphog实施方式800a或800b对于只需要一个轴的精确角度测量的应用来说可能是足够的,如前所述,例如陆地自主车辆的偏航轴,尤其是l2.5/3自主车辆。可能需要三轴siphog实施方式800c,其中需要对所有三个俯仰轴、侧倾轴和偏航轴进行精确角度测量,例如航空、商用无人机、机器人、建筑、农业或l4/l5自主车辆。这可能还包括从摄像头、雷达和其他传感器获取数据,这些传感器“融合”在一起以帮助导航。
57.实施方式800a、800b和800c依靠具有足够内部完整性监控的数字信号处理来实现汽车安全完整性等级(automotive safety integrity level,asil)认证。国际标准组织(international standards organization,iso)目前确定了四个asil级别:a、b、c和d。
asil-d是指对产品设计的最高完整性要求,需要最高性能的陀螺仪来降低自主车辆的伤害风险。imu可以具有安全认证模块875,用于内部电子器件和光学传感器的完整性监控,以及算法的完整性。模块860代表安全认证电子器件和传感器融合堆栈。传感器融合堆栈是指一组软件模块,这些软件模块将原始传感器数据(例如,加速度计、siphog陀螺仪、mems陀螺仪、车轮里程计和gnss原始测量值)共同处理成对姿态、航向、速度和位置的最佳估计,以及传感器误差的内部估计,例如陀螺仪偏差估计。这些内部估计通常被称为系统的“状态”。通过传感器融合技术(例如,扩展卡尔曼滤波器(extended kalman filter))估计和更新系统状态。为了实现传感器融合,需要几层处理。首先,通过专门的驱动程序软件采集数据,其中可能包括访问imu内部的数字电路的代码,以及通过车辆总线读取外部传感器,例如使用车辆控制区域网络(can)总线检索轮速数据。下一个操作包括对采集的原始传感器数据进行校准和完整性检查。其次是高速导航预测。这个预测可能以100-200hz的速率发生,并且在预测中所有可用信息都经过处理以估计车辆姿态、航向、速度和位置。附加的传感器处理任务可能与主导航更新异步发生。这些任务包括将gnss原始测量值gnss处理为基于gnss的位置估计。这个步骤可以可选地包括使用卫星轨道和卫星到接收器时钟误差的外部校正,以及对gnss测量的电离层和对流层相关失真的局部校正的gnss校正技术。这类技术被称为实时动态(real-time kinematic,rtk)或精确点定位(precise point positioning,ppp)处理,可在晴朗的天空条件下将gnss位置误差从米级降低到厘米级。gnss处理通常以1-20hz的速率发生,比高速实时导航预测慢。最后,卡尔曼滤波器本身会执行周期性的测量更新步骤,所述步骤涉及较多计算,并且可以计算为较慢速率,因为测量更新的输出(如陀螺偏差估计)较慢地变化。典型的测量更新发生在1hz下。来自传感器融合软件的数据输出到标准化接口,包括异步串行、同步串行、can总线以及以太网。最后,当gnss接收器包括在imu中时,imu通常还会提供硬件时间脉冲输出,用于使用内部gnss作为时间主机来同步其他车辆子系统的时间。在imu融合外部gnss数据的情况下,imu可以提供以接收硬件时间脉冲输入并将其采样和处理同步到这个外部时间参考。这组处理步骤的集合称为传感器融合堆栈。传感器融合算法通过组合来自所有可用物理传感器的数据来预测移动物体的位置和轨迹。例如,混合imu中的模块860中的传感器融合堆栈也自z轴siphog 802(或来自所有三个siphog 802、804和806,如图8c所示),以及自提供3轴陀螺仪和3轴加速度计数据的板载xyz mems 865接收数据作为输入。附加传感器数据(例如,里程计、磁力计、摄像头、雷达等)也可以用于传感器融合算法。gnss引擎870可以接收卫星数据(当卫星信号可用时)以提高预测的准确度。从实时动态(real-time kinematic,rtk)网络接收的数据可以进一步辅助基于gnss的预测。
58.图9图示了根据本公开内容的实施方式的混合imu模块900的硬件架构。位置和轨迹预测算法由处理装置980(可以是cpu或微控制器)处理。处理装置980可以具有数字信号处理(dsp)块、处理核心(例如,risc处理核心)以及存储器和输入/输出(i/o)块。siphog 902和mems imu 963将测量数据发送到处理装置980,gnss接收器965通过天线974和射频(rf)前端972接收卫星数据。混合imu模块900可以支持各种通信协议,因此,可以具有各种通信接口/电路/总线,例如通用异步接收器/发射器(universal asynchronous receiver/transmitter,uart)、串行外围接口(serial peripheral interface,spi)、控制器局域网(controller area network,can)总线等。混合imu模块900还可以具有以太网物理层(phy)
985以支持以太网协议。可以具有降压转换器块990和连接器995。来自gnss接收器965的每秒脉冲(pulse per second,pps)信号可以用作与其他传感器同步时间的基准,这对于传感器集成的准确度至关重要。
59.通常,siphog在mems imu模块中用作完整性检查的一部分,以用最少的附加部件(即,仅一个siphog可能就足够了)实现高级别的安全认证和性能。
60.siphog可用于减少校准步骤,即,消除对单独温度校准步骤(工厂或实时)的需要可基于使用siphog的低漂移而消除。此外,siphog的低漂移和稳定性可用于最小化初始化或收敛时间。
61.一个或多个siphog可用于减少imu中的温度相关误差,所述imu包括机械imu和gnss接收器。换句话说,一个或多个siphog是修复所有6轴mems imu的漂移的参考,例如,当与卡尔曼滤波器一起使用时,当车辆在甚至平缓坡度的地形上行驶时。siphog的低漂移也可用于以最少的部件和无需驾驶员干预来实现移动车辆的安全停用(所谓的“安全停止”)。
62.在以上的说明书中,已经参考本公开内容的特定示例性实施方式对这些实施方式进行了描述。将显而易见的是:在不脱离如以上权利要求中阐述的本公开内容实施方式的更宽广精神和范围的情况下,可对其做出各种修改和改变。因此,应以说明性意义而不是限制性意义来理解本说明书和附图。此外,方向术语,例如“顶部”、“底部”等并不将本公开内容的范围限制为任何固定方向,而是涵盖方向的各种排列和组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1