无人机多载荷数据交互系统及其数据传输管控方法与流程
1.本发明涉及无人机技术领域,尤其涉及一种无人机多载荷数据交互系统及其数据传输管控方法。
背景技术:
2.无人机要执行各类任务离不开各类机载任务载荷,当前无人机上搭载的任务载荷种类主要包括雷达传感器、光学传感器、磁异探测传感器及通信设备等。早期无人机由于载重能力限制只能携带单一传感器,随着大型长航时无人机的发展,无人机携带的任务载荷种类和数量均不断提升,以支撑多种多样的作战样式要求。
3.为实现对无人机上多种任务载荷数据的传输,通常是通过无人机测控链路,进行任务载荷数据的下传和地面控制站指令的上传,在地面控制站操控台各自载荷显控软件上显示载荷状态、探测数据以及设置传感器工作参数,从而实现对机上各类载荷的状态监控、探测数据显示和控制等功能。
4.传统的无人机,在实现载荷数据传输时,通常以无人机任务管理模块为中转站,对上传的指令消息进行识别并分发给不同任务载荷。而下传的数据在地面控制站由各传感器软件自行识别,任务管理模块不进行管控。
5.无人机测控链路因其无线链路特性,具备有限的带宽和链路波动等特点,而无人机载荷数据也会因传感器探测情况出现较大波动。传统的数据传输方法在搭载单一探测载荷时能够满足使用需要,但当无人机搭载多种探测载荷且某一个或多个载荷短时间内产生大量数据情况下,测控链路无法同时满足包括该载荷在内的所有载荷数据传输需求,将会随机产生丢包,从而影响系统正常工作。
技术实现要素:
6.本发明要解决的技术问题是如何提高无人机载荷数据交互的可靠性,本发明提出一种无人机多载荷数据交互系统及其数据传输管控方法。
7.根据本发明实施例的无人机多载荷数据交互系统,包括:
8.无人机,所述无人机具有机载任务管控模块和机载测控数据链路终端,所述无人机搭载的多种载荷与所述机载任务管控模块通信连接,所述机载任务管控模块与机载测控数据链路终端通信连接;
9.操控台,所述操控台通过地面测控链路终端与所述机载测控数据链路终端通信连接,以实现所述无人机上的多种所述载荷与所述操控台间的数据交互;
10.其中,在数据交互过程中,所述机载任务管控模块对不同载荷数据进行分类,基于分类结果,通过对应优先级的缓冲队列对各所述载荷数据进行传输。
11.根据本发明的一些实施例,所述机载任务管控模块按照预设周期监测系统数据交互状态,并基于所述系统数据交互状态对各缓冲队列的传输速率进行相应调整。
12.在本发明的一些实施例中,所述系统数据交互状态包括:缓存队列占用率、缓存占
用增长率、链路传输时延和丢包数。
13.根据本发明的一些实施例,基于所述系统数据交互状态对各缓冲队列的传输速率进行对应调整包括:
14.若所述缓存队列占用率和/或缓存占用增长率大于预设阈值,则降低对应缓存队列的传输速率;
15.若所述缓存队列的丢包数为0且所述链路传输时延小于时延阈值,则提高对应缓存队列的传输速率;
16.若所述缓存队列的丢包数大于0,则降低对应缓存队列的传输速率。
17.在本发明的一些实施例中,通过所述机载任务管理模块降低或提高所述缓存队列的传输速率的方法包括:
18.机载任务管理模块向对应的载荷主控发送传输速率控制报;
19.接收所述载荷主控回复的当前传输速率等级;
20.所述机载任务管理模块更新当前各载荷传输速率等级表。
21.根据本发明实施例的无人机多载荷数据传输管控方法,所述管控方法用于对如上所述的无人机多载荷数据交互系统的数据交互进行管控,所述方法包括:
22.设置机载任务管控模块与机载测控数据链路终端间数据交互的初始传输速率;
23.机载任务管控模块向各载荷主控发送初始化参数报,所述初始化参数报包含各载荷的初始数据传输速率等级;
24.机载任务管控模块建立不同类型数据缓存队列,并定义缓存队列服务优先级参数;
25.机载任务管控模块收到交互数据时,将所述交互数据放入对应优先级的所述缓存队列进行数据传输。
26.根据本发明的一些实施例,所述管控方法还包括:
27.所述机载任务管理模块通过所述缓存队列将所述交互数据发往机载测控数据链路终端,由所述机载测控数据链路终端完成数据打包、传输。
28.在本发明的一些实施例中,所述机载任务管控模块按照预设周期监测系统数据交互状态,并基于系统数据交互状态对各缓冲队列的传输速率进行相应调整,所述系统数据交互状态包括:缓存队列占用率、缓存占用增长率、链路传输时延和丢包数。
29.根据本发明的一些实施例,所述基于监测结果对相应缓存队列的传输缩率进行对应调整,包括:
30.若所述缓存队列占用率和/或缓存占用增长率大于预设阈值,则降低对应缓存队列的传输速率;
31.若所述缓存队列的丢包数为0且所述链路传输时延小于时延阈值,则提高对应缓存队列的传输速率;
32.若所述缓存队列的丢包数大于0,则降低对应缓存队列的传输速率。
33.在本发明的一些实施例中,基于所述系统数据交互状态对各缓冲队列的传输速率进行对应调整包括:
34.机载任务管理模块向对应的载荷主控发送传输速率控制报;
35.接收所述载荷主控回复的当前传输速率等级;
36.所述机载任务管理模块更新当前各载荷传输速率等级表。
37.本发明提出的无人机多载荷数据交互系统及其数据传输管控方法具有如下有益效果:
38.本发明通过预设缓存队列优先级、载荷和任务数据传输速率等级等传输处理参数,并根据估计的缓存占用和测控链路信道状态动态调整以上参数,再按照数据帧中填写的数据类型字段,将数据放置到不同的传输缓存队列中,按照当前的传输处理参数对数据进行处理,从而实现对多载荷数据的传输管控,保障了系统的正常工作,避免了多种载荷数据在传输时发生丢包现象。通过在挂载多种任务载荷的无人机上进行测试,测试结果表明在2m、4m和8m测控链路带宽下,不同任务情况下各载荷均能够有效完成各自数据的传输,系统工作正常,基本满足了多任务载荷无人机数据传输的需要。
附图说明
39.图1为根据本发明实施例的无人机多载荷数据交互系统的任务网络模型示意图;
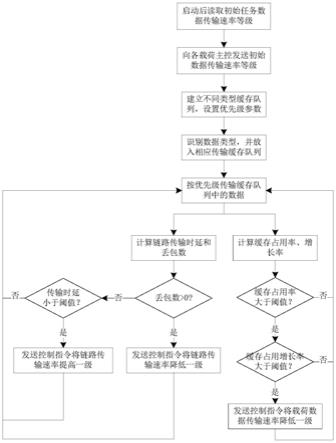
40.图2为根据本发明实施例的无人机多载荷数据传输管控流程示意图;
41.图3为根据本发明实施例的分组调度算法流程示意图;
42.图4为根据本发明实施例的无人机多载荷数据传输管控方法流程图。
具体实施方式
43.为更进一步阐述本发明为达成预定目的所采取的技术手段及功效,以下结合附图及较佳实施例,对本发明进行详细说明如后。
44.本发明中说明书中对方法流程的描述及本发明说明书附图中流程图的步骤并非必须按步骤标号严格执行,方法步骤是可以改变执行顺序的。而且,可以省略某些步骤,将多个步骤合并为一个步骤执行,和/或将一个步骤分解为多个步骤执行。
45.本发明的目的是提出一种无人机多载荷数据交互系统及其数据传输管控方法,采用机载任务管控模块,对不同载荷数据进行类型区分,根据当前系统状态调整优先级和传输策略,通过对不同载荷数据传输速率的控制,尽可能保证关键数据的可靠传输,以实现系统的正常工作。
46.如图1所示,根据本发明实施例的无人机多载荷数据交互系统,包括:无人机和操控台。
47.其中,无人机具有机载任务管控模块和机载测控数据链路终端,无人机搭载的多种载荷与机载任务管控模块通信连接,机载任务管控模块与机载测控数据链路终端通信连接。例如,部署在无人机上的各载荷可以通过机载任务总线与机载任务管控模块实现数据交换,机载任务管控模块与机载测控数据链路终端通过串行总线实现数据交换。
48.操控台通过地面测控链路终端与机载测控数据链路终端通信连接,以实现无人机上的多种载荷与操控台间的数据交互。例如,机载测控数据链路终端可以通过无线信道与无人机地面控制站端实现数据交换。
49.其中,在数据交互过程中,机载任务管控模块对不同载荷数据进行分类,基于分类结果,通过对应优先级的缓冲队列对各载荷数据进行传输。
50.根据本发明的一些实施例,机载任务管控模块按照预设周期监测系统数据交互状
态,并基于系统数据交互状态对各缓冲队列的传输速率进行相应调整。可选地,系统数据交互状态可以包括:缓存队列占用率、缓存占用增长率、链路传输时延和丢包数。
51.根据本发明的一些实施例,基于系统数据交互状态对各缓冲队列的传输速率进行对应调整包括:
52.若缓存队列占用率和/或缓存占用增长率大于预设阈值,则降低对应缓存队列的传输速率;
53.若缓存队列的丢包数为0且链路传输时延小于时延阈值,则提高对应缓存队列的传输速率;
54.若缓存队列的丢包数大于0,则降低对应缓存队列的传输速率。
55.在本发明的一些实施例中,通过机载任务管理模块降低或提高缓存队列的传输速率的方法包括:
56.机载任务管理模块向对应的载荷主控发送传输速率控制报;
57.接收载荷主控回复的当前传输速率等级;
58.机载任务管理模块更新当前各载荷传输速率等级表。
59.如图4所示,根据本发明实施例的无人机多载荷数据传输管控方法,管控方法用于对如上所述的无人机多载荷数据交互系统的数据交互进行管控,方法包括:
60.s100,设置机载任务管控模块与机载测控数据链路终端间数据交互的初始传输速率;
61.s200,机载任务管控模块向各载荷主控发送初始化参数报,初始化参数报包含各载荷的初始数据传输速率等级;
62.s300,机载任务管控模块建立不同类型数据缓存队列,并定义缓存队列服务优先级参数;
63.s400,机载任务管控模块收到交互数据时,将交互数据放入对应优先级的缓存队列进行数据传输。
64.根据本发明的一些实施例,管控方法还包括:
65.s500,机载任务管理模块通过缓存队列将交互数据发往机载测控数据链路终端,由机载测控数据链路终端完成数据打包、传输。
66.在本发明的一些实施例中,机载任务管控模块按照预设周期监测系统数据交互状态,并基于系统数据交互状态对各缓冲队列的传输速率进行相应调整,系统数据交互状态包括:缓存队列占用率、缓存占用增长率、链路传输时延和丢包数。
67.根据本发明的一些实施例,基于监测结果对相应缓存队列的传输缩率进行对应调整,包括:
68.若缓存队列占用率和/或缓存占用增长率大于预设阈值,则降低对应缓存队列的传输速率;
69.若缓存队列的丢包数为0且链路传输时延小于时延阈值,则提高对应缓存队列的传输速率;
70.若缓存队列的丢包数大于0,则降低对应缓存队列的传输速率。
71.在本发明的一些实施例中,基于系统数据交互状态对各缓冲队列的传输速率进行对应调整包括:
72.机载任务管理模块向对应的载荷主控发送传输速率控制报;
73.接收载荷主控回复的当前传输速率等级;
74.机载任务管理模块更新当前各载荷传输速率等级表。
75.本发明提出的无人机多载荷数据交互系统及其数据传输管控方法具有如下有益效果:
76.采用分发明提出的无人机多载荷数据交互系统及其数据传输管控方法,对缓存队列和信道状态进行估计,调整传输优先级和速率等,避免了多种载荷数据在传输时发生丢包现象。通过在挂载多种任务载荷的无人机上进行测试,测试结果表明在2m、4m和8m测控链路带宽下,不同任务情况下各载荷均能够有效完成各自数据的传输,系统工作正常,基本满足了多任务载荷无人机数据传输的需要。本发明简单实用,达到了应用要求。
77.下面参照附图详细描述根据本发明的无人机多载荷数据交互系统及其数据传输管控方法。值得理解的是,下述描述仅是示例性描述,而不应理解为对本发明的具体限制。
78.无人机多载荷数据交互系统的数据传输网络拓扑如附图1,多载荷数据的传输管控主要在机载任务管控模块实现,结合图2所示,本发明的多载荷数据传输管控方法包括如下步骤:
79.a1,机载任务管控模块启动后读取配置文件,设置机载任务管控模块向机载测控数据链路终端发送任务数据的初始传输速率;
80.a2,机载任务管控模块向各载荷主控发送初始化参数报,其中包含各载荷的初始数据传输速率等级;
81.a3,机载任务管控模块建立不同类型数据缓存队列,并定义缓存队列服务优先级参数;
82.a4,机载任务管控模块收到数据传输服务请求,根据传输数据内容,区分控制指令回执、状态报、业务数据等类型并放入不同缓存队列;
83.a5,按照优先级将数据发往机载测控数据链路终端,由机载测控数据链路终端完成数据打包、传输;
84.a6,周期对缓存队列占用率进行估计,包括:
85.a61,获取各缓存队列当前长度;
86.a62,计算缓存占用率、缓存占用增长率;
87.a7,周期对测控链信道状态进行估计,包括:
88.a71,通过链路状态报文获得数据发送时间和帧计数等数据;
89.a72,计算链路传输时延和丢包数;
90.a8,若缓存占用率、缓存占用增长率大于阈值,那么:
91.将使用此缓存队列的载荷数据传输速率降低一个等级;
92.机载任务管控模块向相关的载荷主控发送传输速率控制报;
93.载荷主控回复当前传输速率等级;
94.机载任务管控模块更新当前各载荷传输速率等级表。
95.a9,若丢包数为0且传输时延小于阈值tm,那么:
96.将任务数据传输速率提高一个等级;
97.跳转到步骤a11;
98.a10,若丢包数大于0,那么:
99.将任务数据传输速率降低一个等级;
100.跳转到步骤a11;
101.a11,跳转到步骤a5,循环以上处理过程。
102.本发明采用基于缓存长度和信道状态的检测方法,提高传输状态检测结果的准确性。根据任务管控模块缓存内数据长度和信道状态估计来判定网络状态,作为传输控制策略的依据。
103.缓存占用率估计:
104.任务管控模块缓存队列的长度反映了当前任务网络的数据流量,通过周期性检测本地缓存队列的长度,将检测结果q与缓存队列的总长度w的比值α作为当前任务管控模块缓存占用率,定义为:
105.α=q/wα=q/w
ꢀꢀꢀꢀꢀ
(1);
106.同时,将上一次计算的缓存队列长度q
old
与当前计算的缓存队列长度q
now
进行比较得出缓存占用增长率,定义为:
107.α=q/wα
inc
=(q
now-q
old
)/q
old
ꢀꢀꢀ
(2);
108.信道状态估计:
109.信道状态估计的内容包括传输时延和丢包数。通过在载荷数据报帧格式中定义发送时间和帧流水号字段,实现对信道状态的估计。
110.传输时延d
t
是指发送方发送数据并收到接收方反馈数据的时延:
111.d
t
=2
×
(ts+tr)
ꢀꢀꢀ
(3);
112.其中,ts为发送方发送数据的时间,tr为接收方收到数据的时间。
113.丢包数n通过将当前数据帧流水号与上一数据帧流水号比较得出。
114.传输时延估计:
115.通过测量当前的传输时延t
t-now
,并将其与旧的传输时延t
t-old
进行加权平均,来得到新的传输时延t
t-new
。
116.t
t-new
=(1-α)
×
t
t-now
+α
×
t
t-old
ꢀꢀꢀ
(4);
117.其中,α的值取1/8。
118.本发明采用队列管理、分组调度和流量整形来实现多载荷数据的传输控制。
119.缓存队列管理:
120.本发明采用预测算法来进行缓冲队列的管理。基于队列的长度预测可能发生的载荷数据丢包,当缓冲队列占用率和增长率超过设置的阈值,在丢包尚未发生时,控制任务网络中的发送端降低发送速率,来避免出现网络丢包。
121.队列分组调度:
122.参考附图3所示,本发明采用容易实现的基于静态优先级的分组调度算法。通过给每个队列赋予不同的优先级,每次需要调度时,具有最高优先级的非空队列中的分组最先被选择服务。
123.发送速率控制:
124.本发明中的发送速率控制包括载荷速率控制和测控链路速率控制,将载荷发送速率分为5个等级,测控链发送速率分为3个等级,依据队列缓存情况和测控链丢包情况进行
相应的速率调整。
125.若缓存占用率超过阈值αm且缓存占用增长率超过阈值α
incm
,则将载荷速率降低一个等级;若缓存占用率未超过阈值αm且缓存占用增长率为负则增加一个等级。
126.若检测到丢包数为0,且传输时延小于阈值tm,则将发送速率增加一个等级;若丢包数大于0,则将发送速率级别减少一个等级。
127.综上所述,本发明通过预设缓存队列优先级、载荷和任务数据传输速率等级等传输处理参数,并根据估计的缓存占用和测控链路信道状态动态调整以上参数,再按照数据帧中填写的数据类型字段,将数据放置到不同的传输缓存队列中,按照当前的传输处理参数对数据进行处理,从而实现对多载荷数据的传输管控,保障了系统的正常工作。
128.通过具体实施方式的说明,应当可对本发明为达成预定目的所采取的技术手段及功效得以更加深入且具体的了解,然而所附图示仅是提供参考与说明之用,并非用来对本发明加以限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1