一种车辆召唤方法、装置、车辆以及机器可读介质与流程
1.本发明涉及车辆技术领域,特别是涉及一种车辆召唤方法、车辆召唤装置、车辆、以及机器可读介质。
背景技术:
2.现有技术中,若需要将停放在停车场中的车辆泊出停车场,通常需要用户前往停放车辆的车位,进入车辆后离开停车场。而用户前往停放车辆的车位可能需要行走较长时间,导致用户使用车辆并不十分便捷。
技术实现要素:
3.鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的一种车辆召唤方法、车辆召唤装置、车辆、以及机器可读介质。
4.为了解决上述问题,本发明公开了一种车辆召唤方法,包括:
5.当用户访问终端上的车辆召唤入口后,呈现车辆的召唤准备过程;
6.确定车辆进入召唤准备就绪状态后,响应用户的召唤启动操作,呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程。由此,用户可以无需前往车辆所在的车位附近,而可以通过终端将车辆召唤至召唤地点,使用户可以便捷地使用车辆。
7.所述呈现车辆的召唤准备过程的步骤,包括:
8.呈现对车辆召唤启动环境进行检查的过程。由此,可以在车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程之前,确保车辆周边环境安全,减少车辆在行驶过程中可能面对的风险。
9.所述呈现对车辆召唤启动环境进行检查的过程的步骤,包括:
10.呈现车辆周围环境实时影像。由此,可以通过车辆周围环境实时影像,更好地观察车辆周围环境,确保车辆周围环境安全。
11.所述方法还包括:
12.车辆进入召唤准备就绪状态或者车辆处于召唤暂停状态的情况下,在预设等待时长内用户未发出召唤启动操作时,向用户反馈车辆退出当前的召唤。由此,车辆长时间未执行车辆召唤的情况下,车辆可以及时退出车辆召唤,确保车辆安全,同时可以通过终端向用户反馈车辆退出当前的召唤,及时告知用户车辆的当前状态。
13.所述方法还包括:
14.在车辆自动驾驶系统满足系统退出条件时,向用户反馈车辆退出当前的召唤。由此,在车辆自动驾驶系统出现异常的情况下,车辆可以及时退出车辆召唤,确保车辆安全,同时可以通过终端向用户反馈车辆退出当前的召唤,及时告知用户车辆的当前状态。
15.所述方法还包括:
16.在响应用户的召唤退出操作时,向用户反馈车辆退出当前的召唤。由此,在用户需
要停止车辆召唤过程的情况下,车辆可以及时退出车辆召唤,确保车辆安全。同时可以通过终端向用户反馈车辆退出当前的召唤,及时向用户反馈车辆已经停止执行车辆召唤。
17.所述呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程的步骤,包括:
18.在车辆从车位驶出的过程中,采用顶视视角呈现车辆从车位中驶出的过程。由此,用户可以在车辆驶出车位的过程中,方便地观察车辆周围环境,确保车辆行驶安全。
19.所述呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程的步骤,包括:
20.采用预设角度的后视视角呈现车辆在召唤路线对应道路行驶的过程。由此,用户可以更好地关注车辆前方可能对车辆行驶产生影响的情况,并及时作出相应的处理,确保车辆安全。
21.所述采用预设角度的后视视角呈现车辆在召唤路线对应道路行驶的过程的步骤,包括:
22.采用预设角度的后视视角,呈现车辆在行驶过程的正常行驶状态、绕行障碍物状态、避让障碍物状态、暂停状态、转向状态中的任一种状态。由此,可以全面地向用户呈现车辆召唤过程中车辆实时状态,以便用户对车辆行驶进行监控。
23.所述方法还包括:
24.车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程中,在车辆进入暂停状态时,呈现车辆周围影像查看入口。由此,在车辆行驶过程中,若用户需要详细观察车辆周围环境,可以在车辆处于暂停状态下,呈现车辆周围影像查看入口以便用户通过车辆周围影像观察车辆周围环境。
25.所述方法还包括:
26.当用户访问车辆周围影像查看入口后,采用前视图视角呈现车辆前方的影像。由此,可以便于用户快速观察更有可能影响车辆行驶安全的车辆前方环境。
27.所述方法还包括:
28.在呈现车辆前方影像的过程中,响应用户的视角切换操作,根据所述视角切换操作所选择的视角呈现对应的影像。由此,可以便于用户更加全面地观察车辆周围环境。
29.所述方法还包括:
30.在车辆到达召唤路线对应的召唤地点后,呈现车辆召唤完成结果。由此,可以便于用户了解本次车辆召唤过程的相关情况。
31.所述方法还包括:
32.在车辆到达召唤路线对应的召唤地点后,若在预设锁车时长内用户未进入车辆,呈现车辆进入锁车状态。由此,可以进一步确保车辆安全。
33.本发明还提供一种车辆召唤装置,包括:
34.准备模块,用于当用户访问终端上的车辆召唤入口后,呈现车辆的召唤准备过程;
35.召唤模块,用于确定车辆进入召唤准备就绪状态后,响应用户的召唤启动操作,呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程。由此,用户可以无需前往车辆所在的车位附近,而可以通过终端将车辆召唤至召唤地点,使用户可以便捷地使用车辆。
36.所述准备模块包括:
37.环境检查子模块,用于呈现对车辆召唤启动环境进行检查的过程。由此,可以在车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程之前,确保车辆周边环境安全,减少车辆在行驶过程中可能面对的风险。
38.所述环境检查子模块包括:
39.环境检查单元,用于呈现车辆周围环境实时影像。由此,可以通过车辆周围环境实时影像,更好地观察车辆周围环境,确保车辆周围环境安全。
40.所述装置还包括:
41.第一退出模块,用于车辆进入召唤准备就绪状态或者车辆处于召唤暂停状态的情况下,在预设等待时长内用户未发出召唤启动操作时,向用户反馈车辆退出当前的召唤。由此,车辆长时间未执行车辆召唤的情况下,车辆可以及时退出车辆召唤,确保车辆安全,同时可以通过终端向用户反馈车辆退出当前的召唤,及时告知用户车辆的当前状态。
42.所述装置还包括:
43.第二退出模块,用于在车辆自动驾驶系统满足系统退出条件时,向用户反馈车辆退出当前的召唤。由此,在车辆自动驾驶系统出现异常的情况下,车辆可以及时退出车辆召唤,确保车辆安全,同时可以通过终端向用户反馈车辆退出当前的召唤,及时告知用户车辆的当前状态。
44.所述装置还包括:
45.第三退出模块,用于在响应用户的召唤退出操作时,向用户反馈车辆退出当前的召唤。由此,在用户需要停止车辆召唤过程的情况下,车辆可以及时退出车辆召唤,确保车辆安全。同时可以通过终端向用户反馈车辆退出当前的召唤,及时向用户反馈车辆已经停止执行车辆召唤。
46.所述召唤模块包括:
47.车位驶出子模块,用于在车辆从车位驶出的过程中,采用顶视视角呈现车辆从车位中驶出的过程。由此,用户可以在车辆驶出车位的过程中,方便地观察车辆周围环境,确保车辆行驶安全。
48.所述召唤模块包括:
49.后视呈现子模块,用于采用预设角度的后视视角呈现车辆在召唤路线对应道路行驶的过程。由此,用户可以更好地关注车辆前方可能对车辆行驶产生影响的情况,并及时作出相应的处理,确保车辆安全。
50.所述后视呈现子模块包括:
51.状态呈现单元,用于采用预设角度的后视视角,呈现车辆在行驶过程的正常行驶状态、绕行障碍物状态、避让障碍物状态、暂停状态、转向状态中的任一种状态。由此,可以全面地向用户呈现车辆召唤过程中车辆实时状态,以便用户对车辆行驶进行监控。
52.所述装置还包括:
53.影像入口呈现模块,用于车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程中,在车辆进入暂停状态时,呈现车辆周围影像查看入口。由此,在车辆行驶过程中,若用户需要详细观察车辆周围环境,可以在车辆处于暂停状态下,呈现车辆周围影像查看入口以便用户通过车辆周围影像观察车辆周围环境。
54.所述装置还包括:
55.影像呈现模块,用于当用户访问车辆周围影像查看入口后,采用前视图视角呈现车辆前方的影像。由此,可以便于用户快速观察更有可能影响车辆行驶安全的车辆前方环境。
56.所述装置还包括:
57.影像切换模块,用于在呈现车辆前方影像的过程中,响应用户的视角切换操作,根据所述视角切换操作所选择的视角呈现对应的影像。由此,可以便于用户更加全面地观察车辆周围环境。
58.所述装置还包括:
59.结果呈现模块,用于在车辆到达召唤路线对应的召唤地点后,呈现车辆召唤完成结果。由此,可以便于用户了解本次车辆召唤过程的相关情况。
60.所述装置还包括:
61.锁车模块,用于在车辆到达召唤路线对应的召唤地点后,若在预设锁车时长内用户未进入车辆,呈现车辆进入锁车状态。由此,可以进一步确保车辆安全。
62.本发明还公开了一种车辆,包括:
63.一个或多个处理器;和
64.其上存储有指令的一个或多个机器可读介质,当由所述一个或多个处理器执行时,使得所述车辆执行如本发明所述的一个或多个的方法。
65.本发明还公开了一个或多个机器可读介质,其上存储有指令,当由一个或多个处理器执行时,使得所述处理器执行如本发明所述的一个或多个的方法。
附图说明
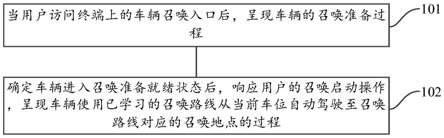
66.图1是本发明的一种车辆召唤方法示例的步骤流程图;
67.图2是本发明的一种终端界面的示意图;
68.图3是本发明的另一种终端界面的示意图;
69.图4是本发明的另一种终端界面的示意图;
70.图5是本发明的另一种终端界面的示意图;
71.图6是本发明的另一种终端界面的示意图;
72.图7是本发明的另一种终端界面的示意图;
73.图8是本发明的另一种终端界面的示意图;
74.图9是本发明的一种车辆召唤装置示例的结构框图。
具体实施方式
75.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明做进一步详细的说明。
76.本发明面对用户前往停放车辆的车位可能需要行走较长时间,导致用户使用车辆并不十分便捷的情况,通过用户持有的终端向用户提供车辆召唤功能。终端响应用户的召唤启动操作之后,可以呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程,从而实现用户在车辆外部将车辆召唤至召唤地点,无需用户前往停
放车辆的车位附近,而可以使车辆前往用户准备上车的地点,使用户可以更加便捷地使用车辆。
77.参照图1,示出了本发明的一种车辆召唤方法示例的步骤流程图,该方法可以应用于包括pc、mac、笔记本电脑、手机、平板电脑等终端。具体可以包括如下步骤:
78.步骤101,当用户访问终端上的车辆召唤入口后,呈现车辆的召唤准备过程;
79.终端可以向用户提供一车辆召唤入口,以供用户通过终端控制车辆执行车辆召唤功能。终端可以与车辆进行通信,由此,在用户通过触控终端、发出语音、发出非接触终端的手势操作等方式访问终端上的车辆召唤入口后,终端可以呈现车辆的召唤准备过程,以便用户对车辆的召唤准备过程进行监控。
80.终端确定用户访问车辆召唤入口后,可以与车辆建立通信连接。车辆可以进行召唤准备,包括车辆环境确认准备和车辆状态确认准备。终端可以呈现车辆的召唤准备过程,以向用户反馈车辆正在进行召唤准备,并向用户呈现车辆的实时状态,使用户可以通过终端监控车辆的召唤准备过程。
81.在车辆满足车辆召唤功能的使用条件的情况下,才向用户呈现车辆召唤入口。作为本发明的一种具体示例,车辆召唤功能的使用条件可以包括车载系统版本满足要求,终端的可用电量、应用程序版本等终端状态满足要求,gps定位信号等硬件状态满足要求等。在车辆召唤功能的使用条件未满足的情况下,车辆召唤入口可以设置为隐藏状态或者不可用状态,此时无法使用车辆召唤功能。
82.步骤102,确定车辆进入召唤准备就绪状态后,响应用户的召唤启动操作,呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程。
83.车辆在进入召唤准备就绪状态,可以启动车辆召唤功能之后,终端可以向用户呈现车辆已经准备就绪。此时,用户可以通过触控终端、发出语音、发出非接触终端的手势操作等方式,发出召唤启动操作。终端可以响应用户的召唤启动操作,控制车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点。同时,终端可以向用户呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程,以便用户可以实时地监控车辆的行驶情况,并根据实际所需要对车辆进行相应的处理。
84.传统方式使用车钥匙的蓝牙功能来对车辆进行召唤的弊端在于,召唤全程需要用户以不间断的操作来控制车辆的行驶,例如用户松开对车钥匙的按压操作则会使得行驶中车辆停止前进。但在本方案中,车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程里,用户全程可以不去控制车辆如何行驶,而让车辆按照召唤路线自动驾驶,用户可以只需要眼睛关注车辆自动驾驶至召唤地点的过程,仅在车辆行驶可能存在风险的情况下才需要通过终端对车辆进行控制。
85.车辆获得的召唤路线可以是车辆学习一段行驶路线后将这段行驶路线作为召唤路线,也可以通过下载云端的召唤路线后得到。
86.召唤路线可以由车位或车位附近的地点为起点,以车位所处位置预设范围内的某一地点为终点。终点包括充电桩、电梯口、零售商铺或者零售设施、车辆服务商铺和商用建筑出入口等。其中,零售商铺例如可以是指设置在停车场的便利店;零售设施例如可以是指设置在停车场的无人售货机;车辆服务商铺例如可以包括提供洗车、修车、保养等服务的商铺;商用建筑出入口包括商用建筑的入口或者出口,商业建筑可以包括商场、写字楼等。用
户可以将召唤路线的终点作为召唤路线对应的召唤地点,也可以将召唤路线途中的某一地点作为召唤路线对应的召唤地点,以确定自身的上车地点,本发明对此不做限制。
87.在呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程中,可以通过环境模拟显示的方式在车载系统当前的界面中展示车辆周围环境对应的模拟行驶环境,具体地,模拟行驶环境包括真实的车辆周围环境中可能影响车辆正常行驶的元素,例如,车辆行驶的道路形状,车辆周围可能影响行驶的障碍物如墙壁、交通锥、缓冲带、行人等,道路上的其他车辆,本发明对此不做限制。同时,还可以呈现车辆的行驶状态、例如档位、车速、剩余行驶距离、车灯状态等,以便用户监控车辆的行驶状态。
88.图2为本发明的一种终端界面示意图。用户可以首先访问图2(a)呈现的车辆召唤入口201,其后,终端可以通过图2(b)呈现车辆的召唤准备过程,其后,确定车辆进入召唤准备就绪状态之后,可以通过图2(c)呈现车辆进入召唤准备就绪状态,用户可以通过点击图2(c)中的用户界面设计元素202以发出召唤启动操作。其后,可以通过图2(d)呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程。
89.在本发明中,呈现车辆的召唤准备过程的步骤,包括:
90.s11,呈现对车辆召唤启动环境进行检查的过程。
91.由于车辆并不位于用户身边,为了确保车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程安全,可以在呈现车辆的召唤准备过程中,具体呈现对车辆召唤启动环境进行检查的过程,以提示用户确认车辆召唤启动环境安全。
92.对车辆召唤启动环境进行检查的过程,可以包括功能使用的安全声明,以提示用户注意使用车辆召唤功能的安全事项;还可以包括对车辆周围环境的检查,以确保车辆所处的车辆周围环境适合进行车辆召唤;还可以包括对车载系统的检查,以确保车载系统的当前状态可以进行车辆召唤;还可以包括对车门、车辆前舱盖、车辆后舱盖等零部件的检查,以确保车辆零部件可以满足正常行驶的要求。
93.在本发明中,呈现对车辆召唤启动环境进行检查的过程的步骤,包括:
94.s21,呈现车辆周围环境实时影像。
95.由于车辆并不位于用户身边,为了进一步确保车辆召唤过程中的安全,可以向用户呈现车辆周围环境的实时影像,以提示用户对车辆周围环境进行进一步的确认,以便开始进行车辆召唤。
96.终端可以呈现车辆周围环境的全景影像,包括车辆前方、车辆后方、车辆左侧、车辆右侧等各个角度的实时影像,以便用户进一步确认特定方向的车辆周围环境可以满足车辆召唤要求。
97.图3为本发明的另一种终端界面示意图。终端呈现车辆的召唤准备过程中,可以首先通过图3(a)向用户展示安全声明,在用户确认阅读安全声明之后,可以通过图3(b)呈现车辆准备加载影像。在影像加载完成后,可以通过图3(c)呈现车辆周围环境的全景影像,同时,用户可以通过点击图3(c)中的用户界面设计元素301,使界面切换至图3(d)所示的车辆前方、车辆后方、车辆左侧、车辆右侧中任一方向的实时影像,用户可以对不同方向的实时影像中进行切换,来查看想要进一步确认的特定方向的车辆周围环境的安全。在呈现车辆准备加载影像的过程中,车辆可以检查车辆召唤条件如车载系统是否已经启用车辆召唤功能,车门、车辆舱盖等零部件是否满足车辆安全行驶要求,在车辆不满足车辆召唤条件时,
终端可以呈现图3(e)以告知用户车辆无法启用车辆召唤功能。而在车辆满足车辆召唤条件,且用户确认车辆周围环境安全的情况下,终端可以呈现图3(f)提示用户车辆准备进入车辆召唤。在车辆准备完成后,终端向用户呈现图2(c)的召唤准备就绪状态。
98.在本发明中,方法还包括:
99.s31,车辆进入召唤准备就绪状态或者车辆处于召唤暂停状态的情况下,在预设等待时长内用户未发出召唤启动操作时,向用户反馈车辆退出当前的召唤。
100.车辆在召唤准备过程完成之后,可以进入召唤准备就绪状态,等待用户主动启动车辆召唤过程。在车辆召唤过程中,用户可以控制车辆暂停行驶,进入召唤暂停状态。在车辆进入召唤准备就绪状态或者车辆处于召唤暂停状态的情况下,由于车辆未完成车辆召唤,终端以及车辆需要等待用户的操作才能进行下一步的处理。
101.但是,若在预设等待时长内,用户未发出召唤启动操作,此时可以认为用户暂时没有进行下一步的意图,则此时车辆可以主动退出车辆召唤,终端可以通过向用户呈现弹窗、发出语音等方式向用户反馈车辆退出当前的召唤,以告知用户召唤功能已退出。
102.图4为本发明的另一种终端界面示意图。若车辆主动退出车辆召唤,终端可以向用户呈现图4,向用户反馈车辆退出当前的召唤。
103.在本发明中,方法还包括:
104.s41,在车辆自动驾驶系统满足系统退出条件时,向用户反馈车辆退出当前的召唤。
105.在车辆的召唤准备过程以及车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程中,车辆还可以实时检查车辆的自动驾驶系统是否满足系统退出条件,以确定车辆的自动驾驶系统是否可以满足车辆召唤功能的要求。在车辆自动驾驶系统满足系统退出条件,即车辆的自动驾驶系统无法满足车辆召唤的要求的情况下,车辆可以主动停止执行车辆召唤,终端可以通过向用户呈现弹窗、发出语音等方式向用户反馈车辆退出当前的召唤,以告知车辆无法使用车辆召唤。
106.如若车辆内存在其他用户,在车辆内部的方向盘、刹车踏板等零部件被其他用户控制的情况下,可以认为车辆内的用户此时需要主动控制车辆行驶,这种情况下车辆自动驾驶属于不可用的状态,即车辆自动驾驶系统满足系统退出条件。在车辆网络异常、系统异常等车辆异常情况下,可以认为车辆此时无法正常执行自动驾驶功能,则可以认为车辆自动驾驶系统满足系统退出条件。
107.在本发明中,方法还包括:
108.s51,在响应用户的召唤退出操作时,向用户反馈车辆退出当前的召唤。
109.用户在车辆的召唤准备过程以及车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程中,皆可以随时主动退出车辆召唤。若用户需要退出车辆召唤,用户可以通过触控终端、发出语音、发出非接触终端的手势操作等方式发出召唤退出操作。终端可以响应用户的召唤退出操作,车辆退出车辆召唤后,终端可以通过向用户呈现弹窗、发出语音等方式向用户反馈车辆退出当前的召唤,以向用户提示车辆停止执行车辆召唤。
110.在具体实现中,用户可以通过主动点击终端界面呈现的用于退出车辆召唤的用户界面设计元素,以主动退出车辆召唤。
111.在用户设置终端进入锁屏状态、关屏状态、或者切换至其他应用的情况下,此时用户并未关注车辆的行驶状态,则此时也可以认为用户通过停止呈现车辆自动驾驶至召唤地点的过程的界面的方式发出召唤退出操作,退出车辆召唤。
112.用户在车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程中,为了确保车辆行驶安全,可以在车辆行驶异常的情况下发出召唤退出操作,及时对车辆进行相应的处理。
113.在本发明中,呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程的步骤,包括:
114.s61,在车辆从车位驶出的过程中,采用顶视视角呈现车辆从车位中驶出的过程。
115.在车辆从车位驶出的过程中,由于车位通常距离墙壁、其他车辆等障碍物距离较近,且车辆的多个方向可能同时存在障碍物,为了便于用户全面地观察车辆从车辆驶出过程中车辆周围环境,可以采用顶视视角的方式呈现车辆从车位中驶出的过程,以确保车辆驶出车位过程中的安全。
116.图5为本发明的另一种终端界面示意图。在车辆从车位驶出的过程中,可以采用顶视视角呈现一与真实车辆对应的车辆虚拟模型,并通过车辆虚拟模型呈现车辆从车位中驶出的过程。
117.可选地,在车辆从车位驶出的过程中,还可以在车载系统当前的界面中使用环境模拟显示来呈现车辆周围环境对应的模拟行驶环境。模拟行驶环境中可以呈现真实的车辆周围环境中可能影响车辆从车位驶出的元素,例如,车位形状,车辆从车位驶出的障碍物如墙壁、交通锥、缓冲带、行人等,车位周围的其他车辆等,本发明对此不做限制。
118.在本发明中,呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程的步骤,包括:
119.s71,采用预设角度的后视视角呈现车辆在召唤路线对应道路行驶的过程。
120.在车辆驶出车位后,车辆在召唤路线对应道路行驶至召唤地点的过程中,用户可以重点关注车辆前方可能存在的影响车辆正常行驶的情况,如存在障碍物,存在缓冲带、存在其他车辆正在接近等,以确保车辆在道路行驶过程中的安全。由此,可以采用预设角度的后视视角呈现车辆在召唤路线对应道路行驶的过程,以便用户可以更加全面地观察车辆前方的情况,确保车辆行驶安全。
121.图6为本发明的另一种终端界面示意图。如图6(a)所示,车辆在召唤路线对应道路行驶的过程中,可以采用预设角度的后视视角呈现一与真实车辆对应的车辆虚拟模型,同时使用环境模拟显示来呈现车辆周围环境对应的模拟行驶环境。模拟行驶环境可以呈现真实的车辆周围环境中与车辆行驶关联的元素,例如,车辆所处的道路形状、车辆周围环境可能存在障碍物如墙壁、交通锥、缓冲带、行人等,道路上接近车辆的其他车辆等,本发明对此不做限制。用户可以通过观察车辆虚拟模型在模拟行驶环境中的道路行驶的过程,以观察车辆在召唤路线对应道路行驶的过程,并对车辆行驶安全进行监控。
122.终端界面上还可以在车辆虚拟模型呈现车辆上包括车灯、车窗、车门、雨刮器等零部件的使用状态,以便用户直观感受车辆的细节信息。例如,若真实车辆的右转向灯亮起,则车辆虚拟模型也可以对应点亮模型上的右转向灯,以向用户呈现右转向灯处于开启的使用状态。
123.终端界面上还可以通过在图形用户界面上利用用户界面设计元素呈现车辆的状态数据如车辆是否正在行驶、行驶速度、行驶方向、行驶剩余距离,以便用户具体了解车辆行驶过程中的状态。用户界面设计元素包括文字、图标、图形、背景、高光、布局、以及涵盖弹窗、浮动窗口、文本框、列表等各种使用在图形用户界面上的控件。例如,在图6(a)中,可以呈现文字“车辆召唤行驶中”,以提示车辆当前处于行驶状态;并呈现文字“50m”以及“剩余距离”,以提示遥控泊车当前剩余行驶距离;并呈现文字“d”,以提示车辆当前使用的档位;并呈现文字“3km/h”,以提示车辆当前的行驶速度。还可以根据实际需要,在车辆行驶时呈现围绕车辆虚拟模型的动态光波,以呈现车辆正在行驶中,而若车辆暂停行驶,则可以停止呈现围绕车辆虚拟模型的动态光波,以呈现车辆暂停行驶。
124.终端界面上还可以采用不同的颜色对道路进行渲染,以呈现当前道路的安全等级。在车辆未遭遇障碍物的情况下,可以采用第一颜色渲染道路,以强调道路的安全等级较高。而在车辆遭遇障碍物的情况下,可以采用第二颜色渲染道路,以强调道路的安全等级较低,提示用户注意道路安全。
125.在本发明中,采用预设角度的后视视角呈现车辆在召唤路线对应道路行驶的过程的步骤,包括:
126.s81,采用预设角度的后视视角,呈现车辆在行驶过程的正常行驶状态、绕行障碍物状态、避让障碍物状态、暂停状态、转向状态中的任一种状态。
127.车辆从车位驶出后,可以采用预设角度的后视视角,呈现车辆在行驶过程的正常行驶状态、绕行障碍物状态、避让障碍物状态、暂停状态、转向状态中的任一种状态,以使用户可以得知车辆的当前行驶状态。同时,预设角度的后视视角可以更好地呈现出行驶过程中车辆前方环境,以便用户可以更加清晰地对车辆可能遭遇的情况进行观察。
128.如图6(a)所示,在正常行驶状态下,可以通过使用环境模拟显示来呈现车辆周围环境对应的模拟行驶环境,以呈现真实的车辆周围环境中可能影响车辆正常行驶的元素,例如,车辆行驶的道路形状,车辆周围可能影响行驶的障碍物如墙壁、交通锥、缓冲带、行人等,道路上的其他车辆等。同时可以呈现真实车辆对应的车辆虚拟模型在模拟行驶环境的道路上行驶的状态,以便用户确认车辆在模拟行驶环境中所处的位置。
129.如图6(b)所示,在绕行障碍物状态下,在正常行驶状态的界面的基础上,呈现用于提示障碍物的用户界面设计元素601以强调当前车辆遭遇需要绕行的障碍物。对于多种不同的障碍物来说,提示障碍物的用户界面设计元素的外观可以相同的,从而可以避免用户观察与车辆安全关联性相对较低的障碍物外观,而重点关注车辆前方存在障碍物。同时,还可以在终端界面上呈现用于提示车辆行驶方向的用户界面设计元素602,以强调车辆行驶方向为当前正在绕行障碍物。
130.如图6(c)所示,在避让障碍物状态下,可以在正常行驶状态的界面的基础上,呈现用于提示障碍物的用户界面设计元素603以强调当前车辆遭遇需要避让的障碍物。
131.如图6(d)所示,在暂停状态下,可以在正常行驶状态的界面的基础上,通过用户界面设计元素呈现车辆的状态数据如车辆是否正在行驶、行驶速度、行驶方向、行驶剩余距离,以提示用户车辆当前进入暂停状态。可选地,还可以在车辆处于暂停状态时,停止呈现模拟行驶环境的道路,以提示用户当前车辆并未在道路上行驶,处于暂停状态。
132.如图6(e)所示,在转向状态下,可以在正常行驶状态的界面的基础上,呈现用于提
示车辆行驶方向的用户界面设计元素604,以强调车辆当前的行驶方向。
133.在本发明中,方法还包括:
134.s81,车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程中,在车辆进入暂停状态时,呈现车辆周围影像查看入口。
135.在车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程中,若用户需要进一步仔细观察车辆周围环境,可以控制车辆进入暂停状态。若车辆识别车辆周围环境可能存在异常情况,如车辆识别盲区可能存在障碍物等,车辆可以控制自身进入暂停状态。此时,为了进一步确保车辆召唤过程的安全,终端可以呈现车辆周围影像查看入口,以便用户对车辆周围环境进行进一步的确认。
136.在本发明中,所述方法还包括:
137.s91,当用户访问车辆周围影像查看入口后,采用前视图视角呈现车辆前方的影像。
138.用户可以通过触控终端、发出语音、发出非接触终端的手势操作等方式访问终端上的车辆周围影像查看入口。由于车辆前方的环境可以更加明显地影响车辆正常行驶,由此,终端可以优先采用前视图视角呈现车辆采集的车辆前方影像,以便用户快速确认车辆前方环境是否安全。
139.在本发明中,方法还包括:
140.s92,在呈现车辆前方影像的过程中,响应用户的视角切换操作,根据所述视角切换操作所选择的视角呈现对应的影像。
141.在呈现车辆前方影像的过程中,用户可能期望进一步观察其他视角的车辆周围影像,以便用户进一步确认特定方向的车辆周围环境是否安全。由此,在呈现车辆前方影像的过程中,还可以同时呈现用于切换为其他视角的用户界面设计元素。用户可以基于用于切换为其他视角的用户界面设计元素,通过触控终端、发出语音、发出非接触终端的手势操作等方式发出视角切换操作,其后终端可以响应用户的视角切换操作,根据所述视角切换操作所选择的视角呈现对应的影像,以便用户更加全面地观察车辆周围环境。
142.作为本发明的一种示例,图7为本发明示例的一种终端界面示意图。如图7(a)所示,用户点击车辆周围影像查看入口701之后,可以如图7(b)所示呈现采用前视图视角呈现车辆前方的影像,同时呈现用于切换为其他视角的用户界面设计元素702,用户可以基于用于切换为其他视角的用户界面设计元素702发出视角切换操作,终端可以响应用户的视角切换操作,如图7(c)根据所述视角切换操作所选择的全景视角呈现对应的全景影像。
143.在本发明中,方法还包括:
144.s101,在车辆到达召唤路线对应的召唤地点后,呈现车辆召唤完成结果。
145.在车辆到达召唤路线对应的召唤地点后,终端可以呈现车辆召唤完成的结果,以提示车辆召唤完成。作为本发明的一种具体的实施方式,图8为本发明的另一种终端界面示意图。如图8(a)所示,终端可以呈现车辆召唤完成结果,其具体可以呈现车辆处于召唤完成状态,还可以呈现车辆召唤过程中如驾驶距离、驾驶时长等信息的总结性展示,还可以呈现车辆召唤过程分享入口。若用户针对车辆召唤过程分享入口发出分享操作,则可以如图8(b)所示,向用户呈现本次车辆召唤过程的路线图,以及多种应用程序的分享入口,以便用户将车辆召唤过程的路线图通过不同的应用程序分享至社交平台。
146.在本发明中,方法还包括:
147.s111,在车辆到达召唤路线对应的召唤地点后,若在预设锁车时长内用户未进入车辆,呈现车辆进入锁车状态。
148.在车辆到达召唤路线对应的召唤地点后,车辆通常可以位于用户附近,由此,车辆可以进入解锁状态,以便用户直接进入车辆,而无需用户进行额外的操作。若在预设锁车时长内用户未进入车辆,则可以认为用户目前没有进入车辆的需求,车辆进入锁车状态。此时终端可以向用户呈现车辆进入锁车状态,以提示用户车辆已经锁定,当前无法直接进入车辆。用户可以根据实际需要,重新解锁车辆,或者保持车辆处于锁车状态。
149.从该示例可以看出,本发明的车辆召唤方法,当用户访问终端上的车辆召唤入口后,呈现车辆的召唤准备过程;确定车辆进入召唤准备就绪状态后,响应用户的召唤启动操作,呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程,从而用户可以无需前往车辆所在的车位附近,而可以通过终端将车辆召唤至召唤地点,使用户可以便捷地使用车辆。
150.需要说明的是,对于方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本发明实施例并不受所描述的动作顺序的限制,因为依据本发明实施例,某些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作并不一定是本发明实施例所必需的。
151.参照图9,示出了本发明的一种车辆召唤装置示例的结构框图,具体可以包括如下模块:
152.准备模块901,用于当用户访问终端上的车辆召唤入口后,呈现车辆的召唤准备过程;
153.召唤模块902,用于确定车辆进入召唤准备就绪状态后,响应用户的召唤启动操作,呈现车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程。
154.所述准备模块包括:
155.环境检查子模块,用于呈现对车辆召唤启动环境进行检查的过程。
156.所述环境检查子模块包括:
157.环境检查单元,用于呈现车辆周围环境实时影像。
158.所述装置还包括:
159.第一退出模块,用于车辆进入召唤准备就绪状态或者车辆处于召唤暂停状态的情况下,在预设等待时长内用户未发出召唤启动操作时,向用户反馈车辆退出当前的召唤。
160.所述装置还包括:
161.第二退出模块,用于在车辆自动驾驶系统满足系统退出条件时,向用户反馈车辆退出当前的召唤。
162.所述装置还包括:
163.第三退出模块,用于在响应用户的召唤退出操作时,向用户反馈车辆退出当前的召唤。
164.所述召唤模块包括:
165.车位驶出子模块,用于在车辆从车位驶出的过程中,采用顶视视角呈现车辆从车位中驶出的过程。
166.所述召唤模块包括:
167.后视呈现子模块,用于采用预设角度的后视视角呈现车辆在召唤路线对应道路行驶的过程。
168.所述后视呈现子模块包括:
169.状态呈现单元,用于采用预设角度的后视视角,呈现车辆在行驶过程的正常行驶状态、绕行障碍物状态、避让障碍物状态、暂停状态、转向状态中的任一种状态。
170.所述装置还包括:
171.影像入口呈现模块,用于车辆使用已获得的召唤路线从当前车位自动驾驶至召唤路线对应的召唤地点的过程中,在车辆进入暂停状态时,呈现车辆周围影像查看入口。
172.所述装置还包括:
173.影像呈现模块,用于当用户访问车辆周围影像查看入口后,采用前视图视角呈现车辆前方的影像。
174.所述装置还包括:
175.影像切换模块,用于在呈现车辆前方影像的过程中,响应用户的视角切换操作,根据所述视角切换操作所选择的视角呈现对应的影像。
176.所述装置还包括:
177.结果呈现模块,用于在车辆到达召唤路线对应的召唤地点后,呈现车辆召唤完成结果。
178.所述装置还包括:
179.锁车模块,用于在车辆到达召唤路线对应的召唤地点后,若在预设锁车时长内用户未进入车辆,呈现车辆进入锁车状态。
180.对于装置实施例而言,由于其与方法实施例基本相似,所以描述得比较简单,相关之处参见方法实施例的部分说明即可。
181.本发明示例还提供了一种车辆,包括:
182.一个或多个处理器;和
183.其上存储有指令的一个或多个机器可读介质,当由所述一个或多个处理器执行时,使得所述车辆执行本发明示例所述的方法。
184.本发明示例还提供了一个或多个机器可读介质,其上存储有指令,当由一个或多个处理器执行时,使得所述处理器执行本发明示例所述的方法。
185.本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
186.本领域内的技术人员应明白,本发明实施例的实施例可提供为方法、装置、或计算机程序产品。因此,本发明实施例可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明实施例可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
187.本发明实施例是参照根据本发明实施例的方法、终端设备(系统)、和计算机程序
产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理终端设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理终端设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
188.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理终端设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
189.这些计算机程序指令也可装载到计算机或其他可编程数据处理终端设备上,使得在计算机或其他可编程终端设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程终端设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
190.尽管已描述了本发明实施例的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明实施例范围的所有变更和修改。
191.最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的相同要素。
192.以上对本发明所提供的一种车辆召唤方法、装置、车辆以及机器可读介质,进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1