基于随机抖动的高动态范围压缩感知成像系统及方法
1.本发明涉及光学领域,特别涉及一种基于随机抖动的高动态范围压缩感知成像系统及方法。
背景技术:
2.近年来,压缩感知成像方法展示出巨大的应用价值。与传统的成像方法相比,压缩感知成像方法利用后处理算法对亚采样信号进行重建以获取图像,这意味着采样过程不必再遵循传统的奈奎斯特采样定理,仅需对待测信号进行远少于信号数量的探测,便可精确恢复出原始图像。另一方面,压缩感知成像系统也不再依赖于传统成像中的阵列探测器,仅需单点探测器就可以实现信号收集。基于上述优势,压缩感知成像系统及方法被广泛运用于成像光谱、单光子成像、荧光成像等方面。
3.然而,由于自然界中的成像目标是连续的模拟变量,而数字图像则是离散的,因此在压缩感知成像系统中,探测器必须要与模数转换器相结合,并进行一系列量化操作;这必然会导致成像过程中的失真。此外,基于压缩感知成像方法的测量具有高动态范围的特点,这也使得成像过程对探测器位数要求更高。位数较低的探测器非光滑的输入概率密度函数,通常会为成像系统带来较大的量化误差,使压缩感知成像质量降低。
4.在传统成像系统中,为解决量化噪声问题,有研究人员提出在量化前引入随机抖动,利用抖动的随机性打破量化输入
‑
输出间的固定关系,使输入概率密度函数趋于平滑,达到减小量化噪声的目的。但是,传统的抖动方法都是在单次测量中引入单次随机抖动,并没有一种基于多次并行随机抖动的成像方法。单次测量中引入单次随机抖动的方法抖动数据规模较大,降低量化误差的能力有限,并且对抖动幅度要求较为严格。而且,目前并没有针对压缩感知成像系统的抖动方法。
5.综上所述,现有压缩感知成像系统中,数位低的探测器会造成成像质量降级,而且探测器必须与数模转换器进行一系列量化操作会造成成像失真。虽然,传统成像技术中利用在单次测量中引入单次随机抖动的方法可以减小量化噪音,但是,由于抖动数据规模较大,降低量化误差的能力有限,对抖动幅度要求也较为严格。而且,目前还没有针对压缩感知成像系统的抖动方法。
技术实现要素:
6.本发明的目的在于,克服现有压缩感知成像系统对探测器数位要求过高,而且不具备利用抖动方法减小量化噪音的缺点,和传统成像系统对抖动幅度要求严格的缺点,从而提供一种基于随机抖动的高动态范围压缩感知成像系统及方法。本发明提供的压缩感知成像系统及方法可以在探测器位数受限的情况下降低量化误差,并在抖动振幅较大的情况下也能进一步降低量化误差,以提升系统成像质量。
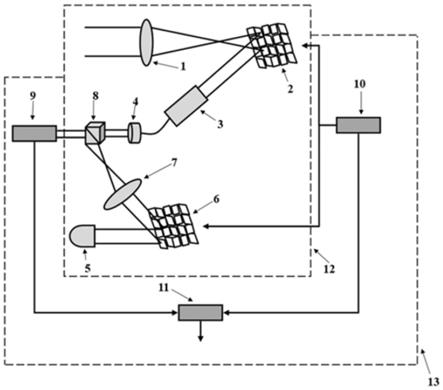
7.所述一种基于随机抖动的高动态范围压缩感知成像系统,包括:光学单元12和电学单元13,其特征在于,包括:
8.所述光学单元12包括:第一成像镜头1、空间光调制器2、收集模块3、匀光模块4、光源5、抖动部件6、第二成像镜头7和分光模块8;
9.所述电学单元13包括:探测器9、控制模块10和存储计算模块11;其中,
10.所述第一成像镜头1,用于将待测目标成像到空间光调制器2;
11.所述空间光调制器2,基于所述控制模块10产生的所述n对空间互补调制矩阵 b
i
和b
i
',对所述待测目标的成像进行n对随机互补调制,形成n对调制后的互补光信号,其中,i∈[1,n],b
i
=1
‑
b
i
';
[0012]
所述收集模块3,用于在每一次随机互补调制后,汇聚收集所对应的调制后的互补光信号,并将收集的光信号传输至匀光模块;
[0013]
所述匀光模块4,用于将所述收集的光信号进行匀光处理,形成n个均匀光斑和 n个对应的互补均匀光斑,并传输至所述分光模块8;
[0014]
所述光源5,用于生成光信号,所述光信号为所述抖动部件6提供摄入光;
[0015]
所述抖动部件6,基于所述控制模块10产生的所述k个随机灰度矩阵,产生k个随机灰度图像;并将所述k个随机灰度图像传输至所述第二成像镜头7,每个随机灰度图像在空间光调制器2的一对随机互补调制时间内,保持固定不变;
[0016]
所述第二成像镜头7,用于收集所述k个随机灰度图像,并将收集的k个随机灰度图像输出至分光模块8;
[0017]
所述分光模块8,用于将所述每个均匀光斑和对应的互补均匀光斑,与对应的互补调制时间内产生的随机灰度图像进行合束处理,以形成叠加成像,并传输至探测器 9;
[0018]
所述探测器9,用于采集所述叠加图像中任意t个像素分别对应的光强度信号,并进行模数转换,形成量化信号和互补量化信号,并传送至存储计算模块11,其中,所述探测器采集频率与所述空间光调制器2互补调制频率相同;
[0019]
所述控制模块10,用于生成测量矩阵a,并发送至所述存储计算模块11;其中,所述测量矩阵a具体生成过程包括:
[0020]
依次将所述n对空间互补调制矩阵b
i
和b
i
'中的b
i
与b
i
'相减,获得n个中间矩阵 a
i
=b
i
‑
b
i
',并将所述中间矩阵a
i
拉伸成一行,作为所述测量矩阵a的第i行,直至 i=n;
[0021]
所述存储计算模块11,基于所述量化信号与互补量化信号,生成矩阵和矩阵计算所述矩阵和矩阵平均值,生成列向量y1和列向量y2;并基于所述列向量y1和列向量y2与所述测量矩阵a,利用压缩感知算法获得待测目标的重建图像。
[0022]
作为上述系统的一种改进,所述第一成像镜头1包括:望远镜头、显微镜头、单个透镜或透镜组;所述第二成像镜头7包括:望远镜头、显微镜头、单个透镜或透镜组。
[0023]
作为上述系统的一种改进,所述空间光调制器2为具有空间光调制能力的器件,具体包括:液晶空间光调制器或微反射镜阵列;所述抖动部件6为掩膜板在内的具有产生灰度图像能力的器件,具体包括:液晶空间光调制器或微反射镜阵列。
[0024]
作为上述系统的一种改进,所述匀光模块4为具有将入射光转化成均匀光斑能力的器件,具体包括:光纤、匀光棒或匀光片;所述光源5为能主动产生光信号的光学照明元件,具体包括:卤素灯、激光器或led灯;所述分光模块8为具有将多束光合成一束光能力的器件,具体包括:分光棱镜或分光平片;所述收集模块3包括:光纤准直器、透镜或凹面镜。
[0025]
作为上述系统的一种改进,所述探测器9为具有空间分辨能力的光学探测器件,具体包括:电荷耦合器件或cmos图像传感器;所述探测器9输出量化信号和互补量化信号,探测器9具有mid
‑
riser或mid
‑
tread量化特性。
[0026]
一种基于随机抖动的高动态范围压缩感知成像方法,包括:
[0027]
步骤1通过所述控制模块10产生n对互补的空间光调制矩阵b
i
和b
i
',b
i
=1
‑
b
i
',并依次发送至空间光调制器2;产生k个随机灰度矩阵,并依次发送至抖动部件6,其中i∈[1,n],b
i
=1
‑
b
i
',k≥1;其中,n为互补测量数,根据实际采样率设定;
[0028]
步骤2通过所述第一成像镜头1将待测目标成像到空间光调制器2;
[0029]
步骤3所述空间光调制器2,基于所述控制模块10产生的所述一对空间互补调制矩阵b
i
和b
i
',对所述待测目标的成像进行一对随机互补调制,形成一对调制后的光信号;
[0030]
步骤4通过收集模块3汇聚收集所述一对调制后的光信号,并传输至匀光模块;
[0031]
步骤5通过所述匀光模块4将所述收集的一对光信号进行匀光处理,形成均匀光斑和对应的互补均匀光斑;并传输至所述分光模块8;
[0032]
步骤6重复步骤3
‑
5,直至i=n;
[0033]
步骤7通过所述光源5生成光信号,所述光信号为所述抖动部件6提供摄入光;
[0034]
步骤8所述抖动部件6,基于所述控制模块10产生的所述随机灰度矩阵,产生随机灰度图像,并传输至所述第二成像镜头7;其中,所述随机灰度图像在空间光调制器2的一对随机互补调制时间内,保持固定不变;
[0035]
步骤9通过所述第二成像镜头7收集所述随机灰度图像,并传输至分光模块8;
[0036]
步骤10重复步骤8
‑
9,直至发送k个所述随机灰度图像至分光模块8;
[0037]
步骤11通过所述分光模块8,依次将每个所述均匀光斑和对应的互补均匀光斑,与每对随机互补调制时间内对应随机灰度图像进行合束处理,以形成叠加成像,并传输至探测器9;
[0038]
步骤12通过所述探测器9采集所述叠加图像中任意t个像素分别对应的光强度信号;将采集的t个光强度信号进行模数转换,形成量化信号和互补量化信号,并传送至存储计算模块11;其中,所述探测器采集频率与所述空间光调制器2互补调制频率相同;
[0039]
步骤13通过所述控制模块10,生成测量矩阵a,并发送至所述存储计算模块 11;其中,所述测量矩阵a具体生成过程包括:
[0040]
依次将所述n对空间互补调制矩阵b
i
和b
i
'中的b
i
与b
i
'相减,获得n个中间矩阵 a
i
=b
i
‑
b
i
',并将所述中间矩阵a
i
拉伸成一行,作为所述测量矩阵a的第i行,直至 i=n;
[0041]
步骤14通过所述存储计算模块11,基于所述量化信号与互补量化信号,生成矩阵和矩阵计算所述矩阵和矩阵平均值,生成列向量y1和列向量y2;并基于所述列向量y1和列向量y2与所述测量矩阵a,利用压缩感知算法获得待测目标的重建图像。
[0042]
作为上述方法的一种改进,所述压缩感知算法包括:匹配跟踪算法mp、正交匹配跟踪算法omp、基跟踪算法bp、贪心重建算法、lasso、lars、gpsr、贝叶斯估计算法、magic、ist、tv、stomp、cosamp、lbi、sp、l1_ls、smp算法、sparsa 算法、twist算法、l0重建算法、l1重建算法或l2重建算法。
[0043]
作为上述方法的一种改进,所述探测器9为具有空间分辨能力的光学探测器件,具体包括:电荷耦合器件或cmos图像传感器;所述探测器9输出量化信号和互补量化信号,并
具有mid
‑
riser或mid
‑
tread探测器传输特性;所述随机灰度矩阵具有的统计分布性质包括:均匀分布,高斯分布或泊松分布。
[0044]
作为上述方法的一种改进,所述探测器9将采集的t个光强度信号进行模数转换,形成量化信号和互补量化信号,具体包括:
[0045]
所述探测器9,基于采集的t个光强度信号,和对应的空间调制矩阵b
i
,输出各像素位置上由n个均匀光斑对应的量化信号所组成的列向量并基于采集的t个光强度信号和与空间调制矩阵b
i
互补的空间调制矩阵b
i
',输出各像素位置上由n个与所述均匀光斑对应互补均匀光斑的互补量化信号所组成的列向量述均匀光斑对应互补均匀光斑的互补量化信号所组成的列向量其中,
[0046]
每个像素位置都通过空间调制矩阵b
i
'进行了n次互补调制,并对应的输出了n 个均匀光斑的量化结果,由于选择了探测器包括t个像素位置,因此,记录下t个像素位置分别对应的n个所述互补均匀光斑;各像素位置上对应的互补均匀光斑的互补量化信号组成列向量
[0047]
每个像素位置都通过空间调制矩阵b
i
进行了n次调制,并对应的输出了n个均匀光斑对应的量化信号,由于选择了探测器包括t个像素位置,因此,记录下t个像素位置分别对应的n个均匀光斑;各像素位置上均匀光斑的对应的量化结果为应的n个均匀光斑;各像素位置上均匀光斑的对应的量化结果为
[0048]
作为上述方法的一种改进,所述步骤14具体包括:
[0049]
所述存储计算模块11将所述列向量拼接成矩阵并将所述列向量拼接成矩阵计算所述矩阵的每一行的行向量均值,并组成的列向量y1,计算矩阵的每一行的行向量均值,并组成的列向量y2;通过计算测量结果列向量y=y1‑
y2,并根据所述测量结果列向量y与测量矩阵a,利用压缩感知算法进行重建获得成像目标的重建图像;其中,矩阵和矩阵的维度为 n
×
t,列向量y1和列向量y2维度为n
×
1。
[0050]
本发明的优点在于:
[0051]
1、本发明实现了在压缩感知成像中引入随机抖动,通过抖动部件向光路中引入随机灰度图像,并通过选取探测器上t个像素实现了一次测量多次抖动,即通过光学手段添加了并行抖动。抖动的添加,降低了成像系统对探测器位数的需求。传统的探测器的量化即模数转换会造成量化误差,本发明提供的系统和方法引入并行抖动之后,降低这种量化误差,并解决了由于探测器位数不足造成的量化误差大的问题;
[0052]
2、本发明在压缩感知成像光路中引入随机灰度图像,在不增加采样时间的前提下,在测量中引入了多次抖动,与现有的抖动方法相比,实现了基于单次测量的多次并行抖动,增加了抖动次数,进一步降低了量化误差;
[0053]
3、本发明的系统可以降低压缩感知成像系统中的量化误差,实现基于低位数探测器的高质量成像,因此在采样时间与探测器条件有限的动态成像和单光子成像领域有广泛的应用价值。
附图说明
[0054]
图1为本发明的基于随机抖动的高动态范围压缩感知成像系统的结构示意图。
[0055]
附图标识
[0056]
1、第一成像镜头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2、空间光调制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3、收集模块
[0057]
4、匀光模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5、光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6、抖动部件
[0058]
7、第二成像镜头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8、分光模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9、探测器
[0059]
10、控制模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11、存储计算模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12、光学单元
[0060]
13、电学单元
具体实施方式
[0061]
以下结合附图进一步说明本发明所提供的技术方案。
[0062]
如图1所述,本发明提供的一种基于随机抖动的高动态范围压缩感知成像系统,包括:光学单元12和电学单元13,其特征在于,包括:
[0063]
所述光学单元12包括:第一成像镜头1、空间光调制器2、收集模块3、匀光模块4、光源5、抖动部件6、第二成像镜头7和分光模块8;
[0064]
所述电学单元13包括:探测器9、控制模块10和存储计算模块11;其中,
[0065]
所述第一成像镜头1,用于将待测目标成像到空间光调制器2;
[0066]
所述空间光调制器2,基于所述控制模块10产生的所述n对空间互补调制矩阵 b
i
和b
i
',对所述待测目标的成像进行n对随机互补调制,形成n对调制后的互补光信号,其中,i∈[1,n],b
i
=1
‑
b
i
';
[0067]
所述收集模块3,用于在每一次随机互补调制后,汇聚收集所对应的调制后的互补光信号,并将收集的光信号传输至匀光模块;
[0068]
所述匀光模块4,用于将所述收集的光信号进行匀光处理,形成n个均匀光斑和 n个对应的互补均匀光斑,并传输至所述分光模块8;
[0069]
所述光源5,用于生成光信号,所述光信号为所述抖动部件6提供摄入光;
[0070]
所述抖动部件6,基于所述控制模块10产生的所述k个随机灰度矩阵,产生k个随机灰度图像;并将所述k个随机灰度图像传输至所述第二成像镜头7,每个随机灰度图像在空间光调制器2的一对随机互补调制时间内,保持固定不变;
[0071]
所述第二成像镜头7,用于收集所述k个随机灰度图像,并将收集的k个随机灰度图像传输至分光模块8;
[0072]
所述分光模块8,用于将所述每个均匀光斑和对应的互补均匀光斑,与对应的互补调制时间内产生的随机灰度图像进行合束处理,以形成叠加成像,并传输至探测器 9;
[0073]
所述探测器9,用于采集所述叠加图像中任意t个像素分别对应的光强度信号,并进行模数转换,形成量化信号和互补量化信号,并传送至存储计算模块11,其中,所述探测器采集频率与所述空间光调制器2互补调制频率相同;
[0074]
所述控制模块10,用于生成测量矩阵a,并发送至所述存储计算模块11;其中,所述测量矩阵a具体生成过程包括:
[0075]
依次将所述n对空间互补调制矩阵b
i
和b
i
'中的b
i
与b
i
'相减,获得n个中间矩阵 a
i
=b
i
‑
b
i
',并将所述中间矩阵a
i
拉伸成一行,作为所述测量矩阵a的第i行,直至 i=n;
[0076]
所述存储计算模块11,基于所述量化信号与互补量化信号,生成矩阵和矩阵计算所述矩阵和矩阵平均值,生成列向量y1和列向量y2;并基于所述列向量y1和列向量
y2与所述测量矩阵a,利用压缩感知算法获得待测目标的重建图像。
[0077]
所述第一成像镜头1包括:望远镜头、显微镜头、单个透镜或透镜组;所述第二成像镜头7包括:望远镜头、显微镜头、单个透镜或透镜组。
[0078]
所述空间光调制器2为具有空间光调制能力的器件,具体包括:液晶空间光调制器或微反射镜阵列;所述抖动部件6为掩膜板在内的具有产生灰度图像能力的器件,具体包括:液晶空间光调制器或微反射镜阵列。
[0079]
所述匀光模块4为具有将入射光转化成均匀光斑能力的器件,具体包括:光纤、匀光棒或匀光片;所述光源5为能主动产生光信号的光学照明元件,具体包括:卤素灯、激光器或led灯;所述分光模块8为具有将多束光合成一束光能力的器件,具体包括:分光棱镜或分光平片;所述收集模块3包括:光纤准直器、透镜或凹面镜。
[0080]
所述探测器9为具有空间分辨能力的光学探测器件,具体包括:电荷耦合器件或cmos图像传感器;所述探测器9输出量化信号和互补量化信号,探测器9具有 mid
‑
riser或mid
‑
tread量化特性。
[0081]
一种基于随机抖动的高动态范围压缩感知成像方法,包括:
[0082]
步骤1通过所述控制模块10产生n对互补的空间光调制矩阵b
i
和b
i
',b
i
=1
‑
b
i
',并依次发送至空间光调制器2;产生k个随机灰度矩阵,并依次发送至抖动部件6,其中i∈[1,n],b
i
=1
‑
b
i
',k≥1;其中,n为互补测量数,根据实际采样率设定;
[0083]
步骤2通过所述第一成像镜头1将待测目标成像到空间光调制器2;
[0084]
步骤3所述空间光调制器2,基于所述控制模块10产生的所述一对空间互补调制矩阵b
i
和b
i
',对所述待测目标的成像进行一对随机互补调制,形成一对调制后的光信号;
[0085]
步骤4通过收集模块3汇聚收集所述一对调制后的光信号,并传输至匀光模块;
[0086]
步骤5通过所述匀光模块4将所述收集的一对光信号进行匀光处理,形成均匀光斑和对应的互补均匀光斑;并传输至所述分光模块8;
[0087]
步骤6重复步骤3
‑
5,直至i=n;
[0088]
步骤7通过所述光源5生成光信号,所述光信号为所述抖动部件6提供摄入光;
[0089]
步骤8所述抖动部件6,基于所述控制模块10产生的所述随机灰度矩阵,产生随机灰度图像,并传输至所述第二成像镜头7;其中,所述随机灰度图像在空间光调制器2的一对随机互补调制时间内,保持固定不变;
[0090]
步骤9通过所述第二成像镜头7收集所述随机灰度图像,并传输至分光模块8;
[0091]
步骤10重复步骤8
‑
9,直至发送k个所述随机灰度图像至分光模块8;
[0092]
步骤11通过所述分光模块8,依次将每个所述均匀光斑和对应的互补均匀光斑,与每对随机互补调制时间内对应随机灰度图像进行合束处理,以形成叠加成像,并传输至探测器9;
[0093]
步骤12通过所述探测器9采集所述叠加图像中任意t个像素分别对应的光强度信号;将采集的t个光强度信号进行模数转换,形成量化信号和互补量化信号,并传送至存储计算模块11;其中,所述探测器采集频率与所述空间光调制器2互补调制频率相同;
[0094]
步骤13通过所述控制模块10,生成测量矩阵a,并发送至所述存储计算模块 11;其中,所述测量矩阵a具体生成过程包括:
[0095]
依次将所述n对空间互补调制矩阵b
i
和b
i
'中的b
i
与b
i
'相减,获得n个中间矩阵 a
i
=b
i
‑
b
i
',并将所述中间矩阵a
i
拉伸成一行,作为所述测量矩阵a的第i行,直至 i=n;
[0096]
步骤14通过所述存储计算模块11,基于所述量化信号与互补量化信号,生成矩阵和矩阵计算所述矩阵和矩阵平均值,生成列向量y1和列向量y2;并基于所述列向量y1和列向量y2与所述测量矩阵a,利用压缩感知算法获得待测目标的重建图像。
[0097]
所述步骤3
‑
6与所述步骤8
‑
10同步进行,即空间光调制器调制的同时,抖动部件也在产生灰度图像;并且,步骤3
‑
6中,基于一对空间互补调制矩阵b
i
和b
i
',依次对所述待测目标的成像进行随机互补调制、汇聚收集和匀光处理,并将均匀光斑和对应的互补均匀光斑传输至所述分光模块8,完成一次后,返回步骤3,直至i=n,即完成n次步骤3
‑
6,并一共传输n个均匀光斑和n个对应的互补均匀光斑至所述分光模块8;
[0098]
所述步骤8
‑
9中,所述抖动部件6,基于所述控制模块10产生的所述一个随机灰度矩阵,产生随机灰度图像,并经过收集后进入分光模块8;完成一次后,重复步骤8
‑
9,直至发送k个随机灰度图像至分光模块8,即完成k次步骤8
‑
9,并一共传输k个随机灰度图像至分光模块8;
[0099]
分光模块8依次将每对相对应的所述均匀光斑和互补均匀光斑与对应随机灰度图像进行合束处理,以形成叠加成像,并传输至探测器9;
[0100]
所述压缩感知算法包括:匹配跟踪算法mp、正交匹配跟踪算法omp、基跟踪算法bp、贪心重建算法、lasso、lars、gpsr、贝叶斯估计算法、magic、ist、 tv、stomp、cosamp、lbi、sp、l1_ls、smp算法、sparsa算法、twist算法、 l0重建算法、l1重建算法或l2重建算法。
[0101]
所述探测器9为具有空间分辨能力的光学探测器件,具体包括:电荷耦合器件或cmos图像传感器;所述探测器9输出量化信号和互补量化信号,并具有mid
‑
riser 或mid
‑
tread探测器传输特性;所述随机灰度矩阵具有的统计分布性质包括:均匀分布,高斯分布或泊松分布。
[0102]
所述探测器9将采集的t个光强度信号进行模数转换,形成量化信号和互补量化信号,具体包括:
[0103]
所述探测器9,基于采集的t个光强度信号,和对应的空间调制矩阵b
i
,输出各像素位置上由n个均匀光斑对应的量化信号所组成的列向量并基于采集的t个光强度信号和与空间调制矩阵b
i
互补的空间调制矩阵b
i
',输出各像素位置上由n个与所述均匀光斑对应互补均匀光斑的互补量化信号所组成的列向量述均匀光斑对应互补均匀光斑的互补量化信号所组成的列向量其中,
[0104]
每个像素位置都通过空间调制矩阵b
i
'进行了n次互补调制,并对应的输出了n 个均匀光斑的量化结果,由于选择了探测器包括t个像素位置,因此,记录下t个像素位置分别对应的n个所述互补均匀光斑;各像素位置上对应的互补均匀光斑的互补量化信号组成列向量
[0105]
每个像素位置都通过空间调制矩阵b
i
进行了n次调制,并对应的输出了n个均匀光斑对应的量化信号,由于选择了探测器包括t个像素位置,因此,记录下t个像素位置分别对应的n个均匀光斑;各像素位置上均匀光斑的对应的量化结果为应的n个均匀光斑;各像素位置上均匀光斑的对应的量化结果为
[0106]
所述步骤14具体包括:
[0107]
所述存储计算模块11将所述列向量拼接成矩阵并将所述列
向量拼接成矩阵计算所述矩阵的每一行的行向量均值,并组成的列向量y1,计算矩阵的每一行的行向量均值,并组成的列向量y2;通过计算测量结果列向量y=y1‑
y2,并根据所述测量结果列向量y与测量矩阵a,利用压缩感知算法进行重建获得成像目标的重建图像;其中,矩阵和矩阵的维度为n
×
t,列向量y1和列向量y2维度为n
×
1。
[0108]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1