相机解析力的检测方法、装置、设备、介质及双台阶治具与流程
本公开涉及电子产品检测领域,尤其涉及一种相机解析力的检测方法、 装置、设备、介质及一种双台阶治具。
背景技术:
1、相关技术中,相机的深度与宽度解析力测试一般采用两组图卡进行检测, 利用不同高度的台体治具测试深度解析力,不同大小的柱体治具测试宽度解 析力。但台体治具和柱体治具的制作成本极高,对材料消耗较大,且算法定 位困难计算量大,从而导致较大的制作成本和人工成本。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供一种相机解析力的检测方法、 装置、设备、介质及一种双台阶治具,用于减少检测相机解析力的过程中带 来的成本。
2、根据本公开实施例的第一方面,提供一种相机解析力的检测方法,包括:
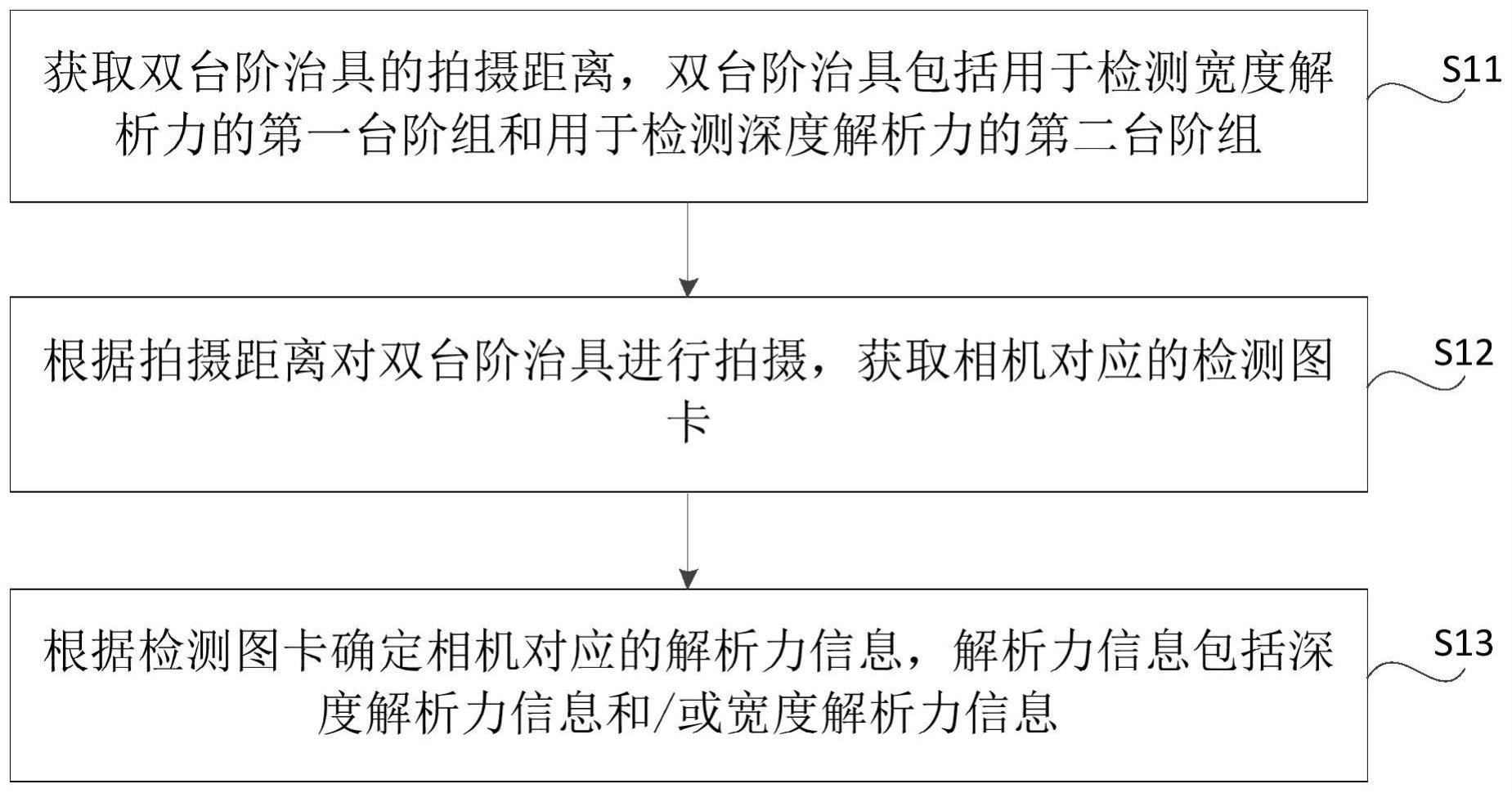
3、获取双台阶治具的拍摄距离,所述双台阶治具包括用于检测宽度解析力 的第一台阶组和用于检测深度解析力的第二台阶组;
4、根据所述拍摄距离对所述双台阶治具进行拍摄,获取所述相机对应的检 测图卡;
5、根据所述检测图卡确定所述相机对应的解析力信息,所述解析力信息包 括深度解析力信息和/或宽度解析力信息。
6、可选地,所述第一台阶组包括多个宽度不同的台阶,所述第二台阶组包 括多个高度不同宽度相同的台阶,所述宽度为台阶延伸方向上的每一级台阶 的长度,所述根据所述图卡信息确定所述相机的解析力信息,包括:
7、获取所述第一台阶组的多个宽度不同的台阶对应的多个宽度信息和所 述第二台阶组的多个高度不同宽度相同的台阶对应的多个高度信息;
8、将所述检测图卡中所述第一台阶组对应的第一距离曲线与所述多个宽 度信息进行比对,获取所述相机对应的宽度解析力信息;
9、将所述检测图卡中所述第二台阶组对应的第二距离曲线与所述多个高 度信息进行比对,获取所述相机对应的深度解析力信息。
10、可选地,所述将所述检测图卡中所述第一台阶组对应的第一距离曲线与 所述多个宽度信息进行比对,获取所述相机对应的宽度解析力信息,包括:
11、基于所述多个宽度信息获取所述第一台阶组对应的宽度分布曲线;
12、将所述宽度分布曲线与所述第一距离曲线进行比对,确定所述第一距离 曲线中最短台阶对应的目标宽度信息;
13、根据所述目标宽度信息确定所述相机对应的宽度解析力信息。
14、可选地,所述将所述检测图卡中所述第二台阶组对应的第二距离曲线与 所述多个高度信息进行比对,获取所述相机对应的深度解析力信息,包括:
15、基于所述多个高度信息获取所述第二台阶组对应的高度分布曲线;
16、确定所述第二距离曲线中最短上升沿对应的位置信息;
17、基于所述高度分布曲线,确定所述位置信息对应的目标高度信息;
18、根据所述目标高度信息确定所述相机对应的深度解析力信息。
19、可选地,所述将所述检测图卡中所述第二台阶组对应的第二距离曲线与 所述多个高度信息进行比对,获取所述相机对应的深度解析力信息,包括:
20、基于所述第二距离曲线,获取导数曲线;
21、确定所述导数曲线中最小峰值对应的目标位置信息;
22、基于所述多个高度信息,确定所述目标位置信息对应的目标高度信息;
23、根据所述目标高度信息确定所述相机对应的深度解析力信息。
24、可选地,所述获取双台阶治具的拍摄距离,包括:
25、根据所述相机的最大视场角和所述双台阶治具底部的最长对角线长度, 通过拍摄距离计算公式获取所述拍摄距离,所述拍摄距离计算公式包括:
26、
27、其中,l表示所述拍摄距离,d表示所述最长对角线长度,dfov表示 所述最大视场角。
28、可选地,所述根据所述拍摄距离对所述台阶治具进行拍摄,获取所述相 机对应的检测图卡,包括:
29、根据所述拍摄距离对所述台阶治具进行拍摄,得到原始检测图卡;
30、确定所述双台阶治具在所述原始检测图卡中的区域信息;
31、基于所述区域信息截取所述原始检测图卡中与所述区域信息对应的图 像,获得所述相机对应的检测图卡。
32、根据本公开实施例的第二方面,提供一种相机解析力的检测装置,包括:
33、第一获取模块,被配置为获取双台阶治具的拍摄距离,所述双台阶治具 包括用于检测宽度解析力的第一台阶组和用于检测深度解析力的第二台阶 组;
34、第二获取模块,被配置为根据所述拍摄距离对所述台阶治具进行拍摄, 获取所述相机对应的检测图卡;
35、确定模块,被配置为根据所述检测图卡确定所述相机对应的解析力信息, 所述解析力信息包括深度解析力信息和/或宽度解析力信息。
36、根据本公开实施例的第三方面,提供一种双台阶治具,包括:
37、用于检测宽度解析力的第一台阶组和用于检测深度解析力的第二台阶 组;
38、所述第一台阶组包括多个宽度不同的台阶,所述第二台阶组包括多个高 度不同宽度相同的台阶。
39、可选地,所述第一台阶组中的最低一层台阶与所述第二台阶组中的最低 一层台阶处于所述双台阶治具的底部,所述第一台阶组中的最高一层台阶与 所述第二台阶组中的最高一层台阶处于所述双台阶治具的顶部;
40、在所述第一台阶组中的从最低一层台阶到最高一层台阶高度不变,宽度 逐层递减;
41、在所述第二台阶组中的从最低一层台阶到最高一层台阶宽度不变,高度 逐层递增。
42、可选地,在对所述双台阶治具进行拍摄时,所述双台阶治具的底面用于 将所述双台阶治具设置在固定面上,拍摄方向为拍摄装置的镜头正对所述双 台阶治具的顶部。
43、可选地,所述双台阶治具的底面为矩形,各级台阶的形状相同。
44、根据本公开实施例的第四方面,提供一种电子设备,包括:
45、存储器;
46、用于存储处理器可执行指令的存储器;
47、其中,所述处理器被配置为:
48、获取双台阶治具的拍摄距离,所述双台阶治具包括用于检测宽度解析力 的第一台阶组和用于检测深度解析力的第二台阶组;
49、根据所述拍摄距离对所述台阶治具进行拍摄,获取所述相机对应的检测 图卡;
50、根据所述检测图卡确定所述相机对应的解析力信息,所述解析力信息包 括深度解析力信息和/或宽度解析力信息。
51、根据本公开实施例的第五方面,提供一种计算机可读存储介质,其上存 储有计算机程序指令,该程序指令被处理器执行时实现本公开第五方面所提 供的相机解析力的检测方法的步骤。
52、本公开的实施例提供的技术方案可以包括以下有益效果:通过获取双台 阶治具的拍摄距离,其中该双台阶治具包括用于检测宽度解析力的第一台阶 组和用于检测深度解析力的第二台阶组,根据拍摄距离对双台阶治具进行拍 摄,获取该相机对应的检测图卡,根据检测图卡确定该相机对应的解析力信 息,解析力信息中包括深度解析力信息和/或宽度解析力信息。从而能够通过 对双台阶治具进行一次拍摄获得检测图卡,并对检测图卡的一组数据进行分 析,就能获得相机对应的深度解析力和宽度解析力,避免了采用两组图卡来 对相机的深度解析力和宽度解析力分别进行测试带来的治具材料消耗较多 和算法定位困难,计算量大的问题,降低了相机解析力检测过程中的治具制 作成本和数据运算成本。
53、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性 的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!