一种支持自适应HDMI编码的无人机数图传输控制方法与流程
一种支持自适应hdmi编码的无人机数图传输控制方法
技术领域
1.本发明属于无人机技术领域,尤其涉及一种支持自适应hdmi编码的无人机数图传输控制方法。
背景技术:
2.目前,关于无人机数据传输与图像传输方法,第一种是分别在不同频段的点对点的数传电台、图传电台分别来传输飞控数传数据、视频图像数据。在复杂电磁环境条件下可靠工作的能力还不足;其次,频率使用效率低。无人机数据链带宽、通信频率通常采用预分配方式,长期占用频率资源,而无人机飞行架次不多,频率使用次数有限,造成频率资源的浪费。传输距离受限,只能应用于单兵近距离控制。
3.第二种是依托运营商公网网络环境,将无人机的数传信息、编码压缩后的视频图像经4g/5g网络发送到后台服务器,同时从后台服务器可以实现对无人机的数传控制。但是运营商公网网络的上行流量带宽受限,而且信号覆盖不完善,会影响图像回传质量。
4.第三种是搭建专网网络环境,将无人机的数传信息、编码压缩后的视频图像经专网4g/5g网络发送到后台服务器,同时从后台服务器可以实现对无人机的数传控制。搭建专网网络环境成本较高,在相邻基站交叠区域或者因地形遮挡等环境下,也存在无线信号覆盖相对较弱的区域。影响上行带宽流量,对图传和数传传输都会影响。
5.综上,针对图像回传需求的解决方式,是在传输设备中做编码压缩,编码压缩后的数据缓存到buffer,当传输设备检测到网络条件变差时,自动调整编码压缩码率来满足带宽能够传输的图像码率需求。
6.在现有专利技术中,中国专利申请号cn201911093360.x公开了一种景区用共享无人机管理平台,包括前台和的后台,前台包括数据库服务器、核心交换机、防火墙设备、景区局域网、管理终端1、管理终端2、管理终端n、转换设备1、转换设备2 和转换设备n;后台包括无人机飞行管理版块、数据管理版块、安全管理版块和数据应用版块;本发明可以对无人机飞行进行管理,也可以对景区无人机数据进行分发和应用的共享管理,管理平台运行稳定可靠,具有很强的实时性,提高了工作效率,有效地节省了人力和物力。
7.又如,中国发明专利申请cn201810914370.4提供了一种景区用共享无人机管理平台,包括无人机本体、客户端、无人机飞行控制器、机载计算机服务器、后台服务器,所述无人机飞行控制器和机载计算机服务器均安装在无人机本体上,客户端处理模块与服务器4通过websocket方式经由互联网双向连接;无人机控制器2与机载计算机3通过pwm电信号双向连接;机载计算机3与服务器4通过websocket方式经由互联网双向连接。本发明同时提供了一种景区用共享无人机管理平台的服务方法,包括商家放置贴有固定标志的二维码的无人机、用户通过手机客户端扫码租用无人机等步骤。业务背景:将数传、编码压缩后的图传2个通道链路合一基于4g/5g网络传输至后台服务器。因为数传是对无人机的基本传输控制要求,所以要优先保证数传通道的可靠性。
8.再如,中国发明专利申请号cn202110947736.x公开了一种基于网络的无人机远程
实时流推送及数传系统与方法,用户登录系统,对某一指定的无人机、多台无人机或无人机群进行视频流直播或数据传输。本发明把网络服务器作为用户远程登录端和无人机之间的媒介,用户登录系统后通过网络将观看请求或交互请求等上传给网络服务器,网络服务器数据中心将上述请求智能处理后转化为指令,并通过网络下发给无人机,无人机通过机载网络通信模块接收指令,并针对指令要求最终将用户请求内容回推用户,真正实现不受地域限制的无人机远程实时流推送与数传。本发明对于无人机远程实时流推送与数传技术未来适用于不同的应用领域有着非常重要的科研意义和经济社会价值。
9.以上公开的发明专利申请均未解决当传输设备检测到网络条件变差时,如何同时有效自动调整编码压缩码率来满足带宽能够传输的图像码率需求,以不影响图像回传质量,保证无人机安全。
技术实现要素:
10.本发明的目的在于提供一种能够克服上述技术问题的,涉及无人机数据传输和图像传输在无线带宽波动受限的情况下优先保障数据传传输的一种支持自适应hdmi编码的无人机数图传输控制方法。
11.所述一种支持自适应hdmi编码的无人机数图传输控制方法,包括以下步骤:
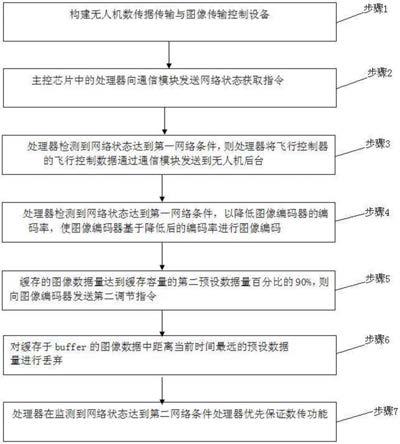
12.步骤1.构建无人机数传据传输与图像传输控制设备,包括:挂载在无人机机仓内的主控芯片,数图传输设备和图像采集设备,主控芯片上设有图像编码器和与图像编码器连接的处理器,通过串口与主控芯片上的处理器连接的飞行控制器,与无人机后台通信的通信模块,以及安装在无人机机底板上的无人机天线,用于无人机的上行与下行链路的通信;
13.步骤2.主控芯片中的处理器向通信模块发送网络状态获取指令,处理器接收通信模块返回的当前的网络状态指令,当前的网络状态指令包括:信号强度、信噪比中至少一项指令参数;
14.步骤3.处理器检测到网络状态达到第一网络条件,缓存的图像数据量达到缓存容量的第一预设图像数据缓存容量,则处理器将飞行控制器的飞行控制数据通过通信模块发送到无人机后台,并对从图像编码器接收到的编码图像缓存到buffer(缓存器),并监测网络状态,如网络状态大于预设的网络参数阈值,将缓存的编码图像发送至通信模块,由通信模块将其发送到4g/5g网络服务器;
15.步骤4.处理器在缓存的图像数据的数据量达到第一缓存条件,处理器检测到网络状态达到第一网络条件,则向图像编码器发送第一调节指令,以降低图像编码器的编码率,使图像编码器基于降低后的编码率进行图像编码,在网络动态流量带宽的允许范围内实时传输图像数据;
16.步骤5.处理器在缓存到buffer的图像数据量达到第二缓存条件,缓存的图像数据量达到缓存容量的第二预设数据量,则向图像编码器发送第二调节指令,并继续降低图像编码器的编码率,使图像编码器基于降低后的编码率进行图像编码,在网络动态流量带宽的允许范围内实时传输图像数据;
17.步骤6.对缓存于buffer的图像数据中距离当前时间最远的预设数据量进行丢弃;
18.步骤7.处理器在监测到网络状态达到第二网络条件,第二网络条件的参数范围低
于第一网络条件的参数阈值,则处理器优先保证数传功能,将图像编码器发送的编码图像丢弃,即只将飞行控制器发送的飞行控制数据通过通信模块发送到主控芯片,以保证无人机的飞行安全。
19.进一步地,步骤1所述飞行控制器与处理器电连接的串口为rs232、ttl或者subs 接口。
20.进一步地,步骤1所述无人机天线在上行链路用于接收地面站对飞行器的飞行姿态或工作任务进行调整,在下行链路用于飞行姿态,电池电量、姿态角以及无人机执行飞行任务信息的反馈。
21.进一步地,步骤1所述无人机天线为旋翼式无人机数传双天线,旋翼式无人机数传双天线安装在无人机机身底部的碳纤维板上,碳纤维板上设有内装有电池的电池仓,无人机底板上的电池仓左右两侧装有数传天线固定位,数传天线与无人机底板间安装有天线旋转装置,可使得数传天线能够360
°
全角旋转,自动选择强信号源,数传天线上设置l型折叠装置,使得数传天线能够90度折叠,从而接受范围更广的信号。
22.进一步地,步骤3所述第一网络条件的参数范围为-19.5~17db。
23.进一步地,步骤3所述第一预设图像数据量为缓存容量的70%。
24.进一步地,步骤5所述第二网络条件的参数为《-19.5db。
25.进一步地,步骤5所述第二预设图像数据量为缓存容量的90%。
26.本发明的优越效果是:
27.1.本发明所述支持自适应hdmi编码的无人机数图传输控制方法,将数传、图传两个通道链路合一为基于4g/5g公网或专网频段使用,减少频段资源带宽浪费,能够传输距离更远、抗干扰性更强、稳定性保密性更高。
28.2.本发明所述支持自适应hdmi编码的无人机数图传输控制方法,通过对无人机的数据传输与图像传输流量控制机制,根据网络资源状况和检测无线信号质量来控制图像传输流量,优先传输数据确保无人机飞行安全,同时能够提高无人机跟后台之间的连接可靠性。
29.3.本发明所述支持自适应hdmi编码的无人机数图传输控制方法,另外在飞行安全的基础下,适配空口流量带宽情况,并将可传输的图像发实时传送到后台服务器。
30.4.本发明所述支持自适应hdmi编码的无人机数图传输控制方法,是无人机实时位置和传感器数据的监测,并通过从后台对无人机的飞行控制进行操作,故数传是无人机需要优先保证的基本要求,通过流控安全机制,确保无人机飞控数据高优先级、可靠传输,以不被大流量图传数据冲击。
31.5.本发明所述支持自适应hdmi编码的无人机数图传输控制方法,在hdmi图像编码被压缩之后先缓存在buffer里面,然后再经5g/4g网络传输到后台服务器,当无线网络信号质量变差时,buffer里面会缓存的越来越,通过设定buffer阈值,在上行带宽流量变差的情况下当缓存触发到阈值时,自动降低hdmi编码压缩码率,在优先确保数传正常发送接收的基础下,根据动态流量带宽的允许范围内实时传输图像,最大限度的发挥无人机实时传输数据与图像功能。
32.6.本发明所述支持自适应hdmi编码的无人机数图传输控制方法,就是无人机传输链路在5g/4g基础上,检测无人机当前位置无线网络信号覆盖质量,通过流控机制优先传输
数传信息,以及通过自动调整图像的编码压缩码率控制,提升飞行安全以及图像回传需求。本发明是数图传通信模块在无人机当前位置检测到的5g/4g网络覆盖信号质量参数,在主控芯片中预设对应不同的阈值,来动态调整hdmi编码压缩码率。
附图说明
33.附图1是本发明所述支持自适应hdmi编码的无人机数图传输控制方法的流程示意图。
具体实施方式
34.下面结合附图对本发明的具体实施方式的实施例进行详细描述。
35.如附图所示,本发明述支持自适应hdmi编码的无人机数图传输控制方法,包括以下步骤:
36.步骤1.构建无人机数传据传输与图像传输控制设备,包括:挂载在无人机机仓内的主控芯片,数图传输设备和图像采集设备,主控芯片上设有图像编码器和与图像编码器连接的处理器,通过串口为rs232、ttl或者subs接口与主控芯片上的处理器连接的飞行控制器,与无人机后台通信的通信模块,以及安装在无人机机底板上的无人机天线,无人机天线为无人机天线在上行链路用于接收地面站对飞行器的飞行姿态或工作任务进行调整,在下行链路用于飞行姿态,电池电量、姿态角以及无人机执行飞行任务信息的反馈,无人机天线为旋翼式无人机数传双天线,旋翼式无人机数传双天线安装在无人机机身底部的碳纤维板上,碳纤维板上设有内装有电池的电池仓,无人机底板上的电池仓左右两侧装有数传天线固定位,数传天线与无人机底板间安装有天线旋转装置,可使得数传天线能够360
°
全角旋转,自动选择强信号源,数传天线上设置l型折叠装置,使得数传天线能够90度折叠,从而接受范围更广的信号。
37.步骤2.主控芯片中的处理器向通信模块发送网络状态获取指令,处理器接收通信模块返回的当前的网络状态指令,当前的网络状态指令包括:信号强度、信噪比中至少一项指令参数;
38.步骤3.处理器检测到网络状态达到第一网络条件,则处理器将飞行控制器的飞行控制数据通过通信模块发送到无人机后台,并对从图像编码器接收到的编码图像缓存到buffer(缓存器),并监测网络状态,如网络状态大于预设的网络参数阈值,将缓存的编码图像发送至通信模块,由通信模块将其发送到4g/5g网络服务器;
39.步骤4.处理器在缓存的图像数据的数据量达到第一缓存条件,缓存的图像数据量达到缓存容量的第一预设图像数据量,当第一预设图像数据量达到缓存容量的70%时,也即第一网络条件的参数范围为-19.5~17db,则向图像编码器发送第一调节指令,以降低图像编码器的编码率,使图像编码器基于降低后的编码率进行图像编码,在网络动态流量带宽的允许范围内实时传输图像数据;
40.步骤5.处理器在缓存到buffer的图像数据量达到第二缓存条件,缓存的图像数据量达到缓存容量的第二预设数据量百分比的90%,也即当第二网络条件的参数为《-19.5db时则向图像编码器发送第二调节指令,并继续降低图像编码器的编码率,使图像编码器基于降低后的编码率进行图像编码,在网络动态流量带宽的允许范围内实时传输图像数据;
41.步骤6.对缓存于buffer的图像数据中距离当前时间最远的预设数据量进行丢弃;
42.步骤7.处理器在监测到网络状态达到第二网络条件,第二网络条件的参数范围低于第一网络条件的参数阈值,则处理器优先保证数传功能,将图像编码器发送的编码图像丢弃,即只将飞行控制器发送的飞行控制数据通过通信模块发送到主控芯片,以保证无人机的飞行安全。
43.在本实施例中,无人机传输链路中的信号强度rsrp和信噪比sinr参数情况如下表1所示:
44.表1
[0045][0046]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的范围内,能够轻易想到的变化或替换,都应涵盖在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1