拍摄装置以及电子设备的制作方法
1.本技术涉及电子技术领域,特别涉及一种拍摄装置以及电子设备。
背景技术:
2.随着电子设备的不断普及,电子设备已经成为人们日常生活中不可或缺的社交工具和娱乐工具,人们对于电子设备的要求也越来越高。以手机为例,人们在使用手机进行拍摄的过程中,存在因手机抖动而导致拍摄的图像模糊、不清晰的问题。目前手机的摄像头可以通过集成光学防抖、电子防抖、感光器防抖等技术以减弱手机抖动对成像清晰度的影响。然而,传统的摄像头防抖系统的防抖效果较差。
技术实现要素:
3.本技术实施例提供一种拍摄装置以及电子设备,可以提高拍摄装置的防抖效果。
4.本技术实施例提供一种拍摄装置,包括:
5.第一支架,具有相背设置的第一侧和第二侧;
6.第一防抖组件,设置在所述第一侧上;
7.第二防抖组件,设置在所述第二侧上;
8.镜头,设置在所述第一防抖组件上,所述第一防抖组件用于驱动所述镜头移动;以及
9.感光元件,设置在所述第二防抖组件上,且在所述镜头的光轴方向上与所述镜头相对设置,所述第二防抖组件用于驱动所述感光元件移动。
10.本技术实施例提供一种电子设备,包括壳体和如上申请实施例所述的拍摄装置,所述拍摄装置设置在壳体内。
11.本技术实施例的拍摄装置可以同时实现镜头防抖和感光元件防抖,集成镜头防抖功能以及感光元件防抖功能,相对于仅采用摄像头防抖或感光芯片防抖等单一防抖结构,本技术实施例可以实现更大角度的光学防抖,有效提升拍摄装置的光学防抖效果。
附图说明
12.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
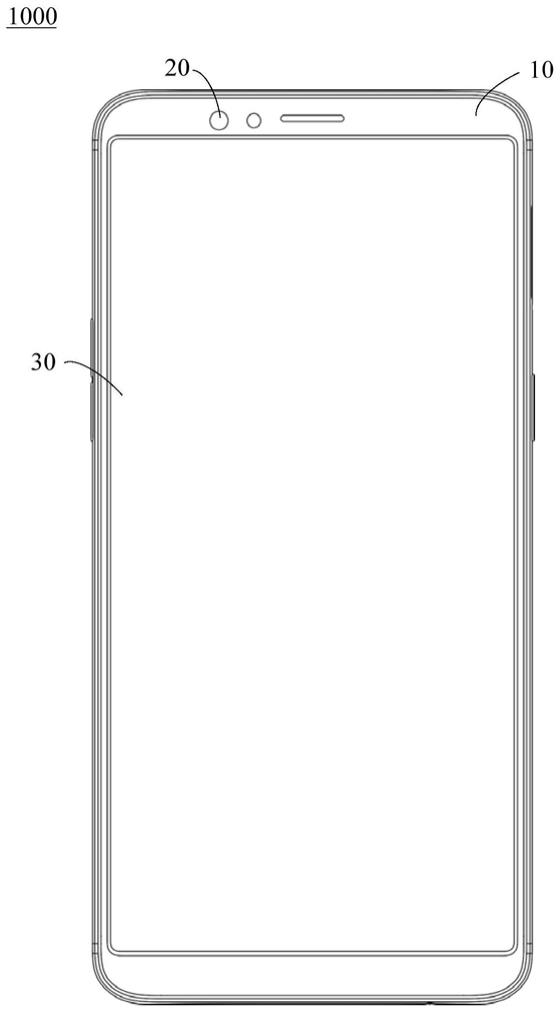
13.图1为本技术实施例提供的电子设备的结构示意图。
14.图2为图1所示电子设备中拍摄装置的第一种结构示意图。
15.图3为图2所示拍摄装置中第一支架的第一种结构示意图。
16.图4为图2所示拍摄装置中第一支架的第二种结构示意图。
17.图5为图1所示电子设备中拍摄装置的第二种结构示意图。
18.图6为图1所示电子设备中拍摄装置的第三种结构示意图。
19.图7为图1所示电子设备中拍摄装置的第四种结构示意图。
20.图8为图2所示第一支架、第一防抖组件和第二防抖组件的结构示意图。
21.图9为图8所示第一支架、第一防抖组件和第二防抖组件的爆炸结构示意图。
具体实施方式
22.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
23.本技术实施例提供一种电子设备,作为在此使用的“电子设备”(或简称为“终端”)包括但不限于被设置成经由有线线路连接和/或经由诸如蜂窝网络、无线局域网等无线通信网络接收/发送通信信号的装置。移动终端的示例包括但不限于蜂窝电话以及常规膝上型和/或掌上型接收器或包括无线电电话收发器的其它电子装置。手机即为配置有蜂窝通信模块的电子设备。
24.示例性的,如图1所示,图1为本技术实施例提供的电子设备的结构示意图。电子设备1000可以包括壳体10、拍摄装置20以及显示屏30。显示屏30设置在壳体10上,其可以用于显示画面,拍摄装置20可以设置于壳体10内,并能够接受到外部环境射入的光线以实现画面拍摄。其中,壳体10可以包括中框和后壳,显示屏30可以盖设于中框的一面,后壳盖设于中框的另一面。例如,显示屏30和后壳可以通过粘接、焊接以及卡接等方式盖设于中框相背设置的两面。拍摄装置20可以设置于显示屏30和后壳之间,并能够接受到外部环境射入的光线。
25.后壳可以是电子设备1000的电池盖,它的材质可以是玻璃、金属和硬质塑料等,也可以由其它电致变色材料制成。其中,后壳具有一定的结构强度,主要用于保护电子设备1000。相应地,中框的材质也可以是玻璃、金属和硬质塑料等。中框也具有一定的结构强度,主要用于支撑和固定拍摄装置20以及安装在中框和后壳之间的其他功能器件。例如电池、主板以及天线等。进一步地,由于中框和后壳一般会直接暴露于外界环境,中框和后壳的材质可以优选地具有一定的耐磨耐蚀防刮等性能,或者在中框和后壳的外表面(也即是电子设备1000的外表面)涂布一层用于耐磨耐蚀防刮的功能材料。
26.显示屏30可以包括显示模组以及用于响应对显示模组进行触控操作的电路等。其中,显示屏30可以是使用oled(organic light
‑
emitting diode有机发光二极管)的屏幕进行图像显示,也可以是使用lcd(liquid crystal display,液晶显示器)的屏幕进行图像显示。并且显示屏30在外形上可以是平板屏幕,也可以是双曲面屏幕,还可以是四曲面屏幕,本实施例对此不作限定。需要说明的是,对于手机而言,上述平板屏幕是指显示屏30在整体上呈平板状设置;上述双曲面屏幕是指显示屏30的左、右边缘区域呈弯曲状设置,其他区域依旧呈平板状设置,这样不仅能够减小显示屏30的黑边并增加显示屏30的可视区域,还能够增加电子设备1000的外观美感及握持手感;上述四曲面屏幕是指显示屏30的上、下、左、右边缘区域均呈弯曲状设置,其他区域依旧呈平板状设置,这样不仅能够进一步减小显示屏30的黑边并增加显示屏30的可视区域,还能够进一步增加电子设备1000的外观美感及握
持手感。
27.请参阅图2,图2为图1所示电子设备中拍摄装置的第一种结构示意图。拍摄装置20可以包括镜头100、感光元件200、第一支架300、第一防抖组件400和第二防抖组件500。其中,第一支架300具有相背设置的第一侧和第二侧,第一防抖组件400设置在第一侧上,第二防抖组件500设置在第二侧上。可以理解的是,第一防抖组件400和第二防抖组件500同时设置在同一支架上,且分别位于第一支架300的相背的两侧。相对于相关技术中,将第一防抖组件400和第二防抖组件500分别设置在不同的支架上,可以节省一个支架,简化拍摄装置20的结构。
28.镜头100设置在第一防抖组件400上,通过第一防抖组件400可以驱动镜头100移动而实现镜头100防抖。其中,镜头100的材质可以是玻璃或塑胶等。镜头100主要用于改变光线的传播路径,并对光线进行聚焦。镜头100可以包括多组镜片,多组镜片会相互矫正过滤光线。
29.感光元件200具体可以是ccd(charge coupled device,电荷耦合元件)这类影像传感器,也可以是cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)这类影像传感器。感光元件200可以在拍摄装置20的光轴方向(也即是镜头100光轴方向,如图2中虚线所示)上与镜头100相对设置,主要用于接收来自镜头100采集的光线,并将光信号转化为电信号,以便于实现拍摄装置20的成像需求。感光元件200设置在第二防抖组件500上,通过第二防抖组件500可以驱动感光元件200移动以实现拍摄装置20的感光元件200防抖。
30.可以理解的是,第一防抖组件400和第二防抖组件500主要用于改善拍摄装置20因用户在使用过程中发生抖动而产生的成像效果,以使得感光元件200的成像效果能够满足用户的使用需求。本技术实施例的拍摄装置20既可以实现镜头100防抖,又可实现感光元件200防抖,即本技术实施例的拍摄装置20具有双防抖功能。
31.相关技术中,通常仅可以实现摄像头防抖或感光芯片防抖等单一防抖功能,然而摄像头防抖或感光芯片防抖等单一防抖结构受电子设备的结构空间限制所能实现的防抖角度有限,仅能实现小角度(诸如1
°
以内或1.5
°
以内)的光学防抖功能。本技术实施例的拍摄装置20可以同时实现镜头100防抖和感光元件200防抖,集成镜头100防抖功能以及感光元件200防抖功能,相对于相关技术可以实现更大角度的光学防抖,有效提升拍摄装置20的光学防抖效果。
32.其中,本技术实施例的第一防抖组件400可以采用电磁式马达、压电式马达、记忆合金式驱动器以及微型机电系统中的一种,电磁式马达可以包括弹片式马达和滚珠式马达。第二防抖组件500也可以采用电磁式马达、压电式马达、记忆合金式驱动器以及微型机电系统中的一种,而且第二防抖组件500所采用的类型可以与第一防抖组件400所采用的类型相同,比如两者皆采用电磁式马达,或者均采用压电式马达。当然,第二防抖组件500所采用的类型可以与第一防抖组件400所采用的类型不同,比如第一防抖组件400可以采用电磁式马达,第二防抖组件500可以采用记忆合金式驱动器以及微型机电系统(micro
‑
electro
‑
mechanical system,mems)。
33.请参阅图3和图4,图3为图2所示拍摄装置中第一支架的第一种结构示意图,图4为图2所示拍摄装置中第一支架的第二种结构示意图。第一支架300具有底壁310和侧壁320,
侧壁320围设在底壁310周缘以形成收纳槽330。底壁310具有相背设置的第一表面311和第二表面312,第一表面311为位于收纳槽330内的一面,第二表面312为位于收纳槽330外的一面。其中,第一防抖组件400设置在第一表面311且位于收纳槽330内,比如可以直接设置在第一表面311上,也可以设置在第一表面311的上方。第二防抖组件500设置在第二表面312,比如可以直接设置在第二表面312上,也可以设置在第二表面312的下方。
34.示例性的,第一支架300可以为规则形状,比如矩形结构,此时第一支架300可以具有多个侧壁320,诸如第一侧壁320a、第二侧壁320b、第三侧壁320c和第四侧壁320d,第一侧壁320a、第二侧壁320b、第三侧壁320c和第四侧壁320d依次连接,第一侧壁320a与第三侧壁320c相对设置,第二侧壁320b与第四侧壁320d相对设置。第一侧壁320a、第二侧壁320b、第三侧壁320c和第四侧壁320d围绕设置在底壁310的周缘,以在底壁310和多个侧壁320之间形成收纳槽330。当然,第一支架300也可以为诸如平板结构、圆形结构、梯形结构或其他规则结构,或者第一支架300也可以为不规则形状。
35.其中,底壁310设置有通孔313,镜头100和感光元件200分别位于通孔313的两侧,镜头100所采集的光线可以通过通孔313射入感光元件200中,感光元件200可以基于所接收到的光线成像,以完成画面拍摄功能。
36.如图5所示,图5为图1所示电子设备中拍摄装置的第二种结构示意图。拍摄装置20还可以包括滤光片600,滤光片600设置在镜头100和感光元件200之间,滤光片600可以接收镜头100所采集到的外部光线,并对外部光线进行过滤处理(比如过滤杂色和偏光),以便于提升拍摄装置20的成像效果。其中,滤光片600可以设置在第一支架300的第一侧,诸如滤光片600可以设置在底壁310的第一表面311上,且滤光片600的尺寸大于通孔313的尺寸,使得滤光片600可以盖设住通孔313,如图5所示。
37.在其他一些实施例中,如图6所示,图6为图1所示电子设备中拍摄装置的第三种结构示意图。滤光片600可以设置在第一支架300的第二侧,诸如滤光片600可以设置在底壁310的第二表面312上,且滤光片600的尺寸大于通孔313的尺寸,使得滤光片600可以盖设住通孔313。
38.请参阅图7,图7为图1所示电子设备中拍摄装置的第四种结构示意图。拍摄装置20还可以包括第二支架700和电路板800,第二支架700设置在电路板800上,第二支架700和电路板800之间可以形成收纳空间900。感光元件200容纳于收纳空间900,而且与电路板800电性连接。第二支架700具有开孔710,开孔710与通孔313相对设置以使得透过通孔313的光线可穿过开孔710而射入感光元件200中。滤光片600可以设置在第二支架700上,比如滤光片600可以粘接在第二支架700中朝向镜头100的一面,如图7所示,当然滤光片600也可以粘接在第二支架700中朝向感光元件200的一面,且位于收纳空间900内。
39.请参阅图8和图9,图8为图2所示第一支架、第一防抖组件和第二防抖组件的结构示意图,图9为图8所示第一支架、第一防抖组件和第二防抖组件的爆炸结构示意图。所述第一防抖组件400可以包括载体410、第一驱动模组420和第二驱动模组430,载体410具有收容空间411,镜头100容置于收容空间411且与载体410连接,第一驱动模组420设置在载体410上,第一驱动模组420可以驱动载体410沿平行于镜头100的光轴方向移动以带动镜头100沿平行于镜头100的光轴方向移动,以补偿镜头100在平行于镜头100的光轴方向的抖动量。第二驱动模组430设置在载体410上,第二驱动模组430可以驱动载体410沿垂直于镜头100的
光轴方向移动以带动镜头100沿垂直于镜头100的光轴方向移动,以补偿镜头100在垂直于镜头100的光轴方向的抖动量。相比于相关技术中仅采用一个弹片式驱动马达或一个滚珠式驱动马达同时实现水平方向和竖直方向的位移,本技术实施例采用两个不同的驱动模组分别对载体410进行两个不同方向的驱动,可以防止由于同一个驱动模组在同时实现两种不同方向的位移时导致驱动模组的部分部件损坏的情况,从而提高第一防抖组件400的防抖可靠性,提升第一防抖组件400的整体性能。
40.此外,经发明人长期研究发现,一些手机的弹片式驱动马达通常运用弹片结构以及吊环线结构实现驱动马达的水平方向以及竖直方向的位移以带动镜头的水平方向以及竖直方向的位移,然而在实现水平方向位移过程中容易出现弹片结构和/或吊环线断裂的问题;一些手机的滚珠式驱动马达通常采用多个滚珠实现驱动马达的水平方向以及竖直方向的位移以带动镜头的水平方向以及竖直方向的位移,然而在实现竖直方向的位移过程中,多个滚珠会相互撞击从而使得多个滚珠容易出现凹坑而导致滚动不顺畅的问题。
41.基于此,本技术实施例的第一驱动模组420包括弹性结构421,弹性结构421被配置为弹性作用力能够使得载体410沿平行于镜头100的光轴方向移动;第二驱动模组430包括滚动结构431,滚动结构431被配置为能够使得载体410基于滚动结构431的滚动操作而实现沿垂直于镜头100的光轴方向移动。
42.可以理解的是,本技术实施例的第一驱动模组420通过弹性结构421实现载体410的上下移动,第二驱动模组430通过滚动结构431实现载体410的左右移动,相对于相关技术,可以避免弹性结构421同时受到上下移动和左右移动等两个相互垂直的方向的拉扯而容易断裂的问题,以及可以避免滚动结构431在实现上下移动过程中容易出现凹坑而导致滚动不顺畅的问题。
43.需要说明的是,本技术实施例中所有方向性指示(诸如上、下、左、右、前、后)仅用于解释在某一特定姿态下各部件之间的相对位置关系、移动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
44.结合图4和图5所示,图5为图3所示防抖机构的第一种部分结构示意图,载体410可以包括第一承载件411、第二承载件412和导向件413,第二承载件412和导向件413均设置在第一承载件411上。第一承载件411可以为规则形状,比如第一承载件411可以为矩形的框架结构第一承载件411。当然,第一承载件411也可以为圆角矩形或不规则形状。
45.第二承载件412可以设置在第一承载件411的通孔内,且可以在通孔内移动。其中,镜头100可以设置在第二承载件412上,当第二承载件412移动时可以带动镜头100移动。示例性的,第二承载件412也可以为矩形框架结构,第二承载件412可以设置有通孔,镜头100可以穿设于通孔,且与通孔的孔壁固定。
46.导向件413在平行于镜头100的光轴方向上层叠设置于第一承载件411的一部分上,以使得第一承载件411的一部分裸露于导向件413外部。比如,导向件413可以包括相互连接的第一侧部和第二侧部,其大致呈“l”型结构。相比于相关技术中,矩形结构的导向件413,本技术实施例的导向件413可以减小导向件413的体积,从而减少导向件413对第一防抖组件400的空间占用,有利于第一防抖组件400的小型化。
47.如图4所示,第一防抖组件400还可以包括磁性组件440,磁性组件440可以为永磁体或者电磁铁,其可以产生磁场。其中磁性组件440可以设置在载体410上,而且磁性组件
440可以包括多个磁性件,每一磁性件均可以包括磁性相反的两个磁体。
48.第一驱动模组420位于磁性组件440所产生的磁场内,而且第一驱动模组420在磁性组件440的作用下能够带动载体410沿平行于镜头100的光轴方向移动。比如,第一驱动模组420还可以包括第一导电件422,第一导电件422在垂直于镜头100的光轴方向上与磁性组件440相对设置,基于弗莱明左手定则,第一导电件422通电之后可以产生一个磁场,第一导电件422所产生的磁场可以与磁性组件440的磁场相互作用而产生垂直于镜头100的光轴方向第一作用力(或者说磁性作用力),弹性结构421能够产生垂直于镜头100的弹性作用力,第一作用力和弹性作用力同时作用于载体410,载体410在第一作用力和弹性作用力的驱动下,可以实现上下移动,从而带动镜头100上下移动,以实现镜头100的自动对焦和/或补偿镜头100在竖直方向上的抖动。
49.第一驱动模组420可以包括两个第一导电件422,两个第一导电件422在垂直于镜头100的光轴方向上相对设置于第二承载件412的两侧。两个第一导电件422的结构可以相同,比如两个第一导电件422可以均为图9所示的环状结构。当然,两个第一导电件422也可以为单杆结构或双杆结构。在一些实施例中,两个第一导电件422的结构也可以不同,比如一个第一导电件422可以为环状结构,另一个第一导电件422可以为单杆结构或双杆结构等。
50.磁性组件440可以包括第一磁性件441、第二磁性件442和第三磁性件443,第一磁性件441、第二磁性件442和第三磁性件443可以均设置在第一承载件411上。
51.一个第一导电件422位于第一磁性件441所产生的磁场内,一个第一导电件422在通电时可以产生磁场,并与第一磁性件441所产生的磁场相互作用,并对第二承载件412产生推力。
52.其中,第一磁性件441可以包括第一磁体4411和第二磁体4412,第一磁体4411的磁性与第二磁体4412的磁性相反,比如第一磁体4411可以为南极,第二磁体4412可以为北极;或者第一磁体4411可以为北极,第二磁体4412可以为南极。而且第一磁体4411和第二磁体4412沿平行于所述镜头的光轴方向层叠设置。一个第一导电件422的一部分与第一磁体4411相对设置,一个第一导电件422的一部分与第二磁体4412相对设置。以第一导电件422为环状结构为例,第一导电件422可以包括沿垂直于镜头100的光轴方西设置的第一部分、第二部分以及沿平行于镜头100的光轴方向设置的第三部分、第四部分,第一部分与第一磁体4411相对设置,第二部分与第二磁体4412相对设置。
53.第二磁性件442设置在垂直于镜头100的光轴方向上与另一个第一导电件422相对设置。以使得另一个第一导电件422位于第二磁性件442所产生的磁场内,另一个第一导电件422在通电时可以产生磁场,并与第二磁性件442所产生的磁场相互作用,并对第二承载件412产生推力,第二承载件412在两个第二导电件所施加的推力以及弹性结构所产生的弹性作用力的作用下,从而实现相对于第一承载件411上下移动。
54.其中,另一个第一导电件422对第二承载件412所产生的推力可以与一个第一导电件422对第二承载件412所产生的推力相等,使得第二承载件412的两侧受力平衡而以相同的速度上下移动。当然,另一个第一导电件422对第二承载件412所产生的推力可以与一个第一导电件422对第二承载件412所产生的推力不相等,从而使得第二承载件412的两侧不平衡而以不同的速度上下移动,进而实现第二承载件412偏转一定的角度。
55.本技术实施例中,第二磁性件442的结构可以与第一磁性件441的结构相同,比如第二磁性件442可以包括第三磁体4421和第四磁体4422,第三磁体4421的磁性与第四磁体4422的磁性相反,比如第三磁体4421可以为南极,第四磁体4422可以为北极;或者第三磁体4421可以为北极,第四磁体4422可以为南极。而且第三磁体4421和第四磁体4422沿平行于所述镜头的光轴方向层叠设置。另一个第一导电件422的一部分与第三磁体4421相对设置,另一个第一导电件422的一部分与第四磁体4422相对设置,具体可参见上述一个第一导电件422与第一磁性件441的相关描述,在此不再赘述。
56.第三磁性件443的结构与第一磁性件441和第二磁性件442的结构不同,其可以包括第五磁体4431和第六磁体4432,第五磁体4431和第六磁体4432沿垂直于镜头100的光轴方向层叠设置。第五磁体4431的磁性与第六磁体4432的磁性相反,比如第五磁体4431可以为南极,第六磁体4432可以为北极;或者第六磁体4432可以为北极,第六磁体4432可以为南极。
57.弹性结构421可以包括上弹片4211和下弹片4212,上弹片4211和下弹片4212分别设置在第二承载件412的两侧,比如第二承载件412具有相背的第一侧面和第二侧面,上弹片4211设置在第一侧面上,下弹片4212设置在第二侧面上。
58.其中,上弹片4211的一部分和下弹片4212的一部分分别与第一承载件411连接。示例性的,上弹片4211可以包括相互连接的第一主体部4211a和第一连接部4211b,第一主体部4211a设置在第二承载件412的第一侧面上,第一连接部4211b与第一承载件411连接,第一主体部4211a和第一连接部4211b之间可以产生弹性作用力,该弹性作用力作用于第二承载件412。
59.下弹片4212可以包括相互连接的第二主体部4212a和第二连接部4212b,第二主体部4212a设置在第二承载件412的第二侧面上,第二连接部4212b与第一承载件411连接,第二主体部4212a和第二连接部4212b之间可以产生弹性作用力,该弹性作用力作用于第二承载件412。弹性结构421所产生的弹性作用力为下弹片4212所述产生弹性作用力和上弹片4211所产生的弹性作用力的合力。
60.本技术实施例中,第二驱动模组430位于磁性组件440所产生的磁场内,而且第二驱动模组430在磁性组件440的作用下能够带动载体410沿垂直于镜头100的光轴方向移动。比如,第二驱动模组430还可以包括第二导电件432,第二导电件432在平行于镜头100的光轴方向上与磁性组件440相对设置。基于弗莱明左手定则,第二导电件432通电之后可以产生一个磁场,第二导电件432所产生的磁场可以与磁性组件440的磁场相互作用而产生平行于镜头100的光轴方向第二作用力(或者说磁性作用力),第二作用力作用于载体410以带动载体410基于滚动结构431沿垂直于镜头100的光轴方向移动,以补偿镜头100在水平方向上的抖动。
61.第二驱动模组430可以包括三个第二导电件,在平行于镜头100的光轴方向上,一个第二导电件432与第一磁性件441相对设置以使得该第二导电件432位于第一磁性件441所产生的磁场内,该第二导电件432在通电时可以产生磁场,并于第一磁性件441所产生的磁场相互作用,并对第一承载件411产生推力,第一承载件411在推力的作用下基于滚动结构431的滚动操作而带动第二承载件412和导向件413一起沿垂直于镜头100的光轴方向移动(或者说左右移动),以补偿镜头100在水平方向上的抖动。
62.滚动结构431可以包括多个第一滚珠4311和多个第二滚珠4312,多个第一滚珠4311和多个第二滚珠4312均设置在载体410上,第二导电件432所产生的第二作用力能够驱动载体410基于多个第一滚珠4311沿第一子方向移动,和/或驱动载体410基于多个第二滚珠4312沿第二子方向移动,第一子方向和第二子方向均垂直于镜头100的光轴方向,而且第一子方向和第二子方向相互垂直。
63.可以理解的是,可以将镜头100的移动分解为x、y和z方向等三个方向的移动,其中x方向和y方向同时与y方向垂直,x方向和y方向在垂直于z方向的平面上相互垂直,其中z方向可以理解为平行于镜头100的光轴方向,x方向和y方向可以理解为垂直于镜头100的光轴方向的两个子方向,x方向可以理解为第一子方向,y方向可以理解为第二子方向。三个第二导电件432中,与第一磁性件441相对设置的第二导电件432以及与第二磁性件442相对设置的第二导电件432所产生的第二作用力能够驱动载体410基于多个第一滚珠4311沿x方向移动,与第三磁性件443相对设置的第二导电件432所产生的第二作用力能够驱动载体410基于多个第二滚珠4312沿y方向移动。
64.具体地,多个第一滚珠4311设置在导向件413中背离第一承载件411的一面,多个第二滚珠4312夹设在导向件413与第一承载件411之间。由此,第一承载件411可基于多个第一滚珠4311相对于第一支架300在第一子方向(或者说在x方向)上移动,同时带动导向件413和第二承载件412在第一子方向上移动,从而使得第一防抖组件400能够在第一子方向上对镜头100进行补偿;和/或第一承载件411可基于多个第二滚珠4312相对于第一支架300在第二子方向(或者说y方向)上移动,同时带动导向件413和第二承载件412在第二子方向移动,从而使得第一防抖组件400能够在第二子方向上对镜头100进行补偿。
65.第一承载件411具有相邻设置的凹槽4111和凸出部4112,导向件413容置于凹槽4111,凸出部4112的外表面与导向件413的外表面大致齐平。其中,大致齐平可以理解为在本领域的允许误差内两个外表面齐平。
66.滚动结构431还可以包括第三滚珠4313,第三滚珠4313设置在载体410上,多个第三滚珠4313可以使得载体410沿第一子方向和/或第二子方向相对于第一支架300移动。第三滚珠4313设置在凸出部4112上。第二导电件432所产生的第二作用力能够驱动载体410基于多个第一滚珠4311和第三滚珠4313沿第一子方向移动,或者驱动载体410基于多个第二滚珠4312和第三滚珠4313沿第二子方向移动。
67.相关技术中的滚珠式驱动马达通常设置有八个滚珠,其中四个滚珠用于实现载体在x方向的移动,另外四个滚珠用于实现载体在y方向的移动。而本技术实施例通过设置即可沿第一子方向(或者说x方向)滚动又可以沿第二子方向(或者说y方向)滚动的第三滚珠4313,使得实现第一子方向滚动的多个第一滚珠4311和实现第二子方向滚动的多个第二滚珠4312可以共用一个滚珠,从而相对于相关技术可以节省一颗滚珠,减少第一防抖组件400的部件,简化第一防抖组件400的结构。
68.第一防抖组件400还可以包括盖体450,盖体450与第一支架300相互连接以在第一支架300和盖体450之间形成活动空间,载体410可移动地容置于活动空间。可以理解的是,载体410可以在活动空间内进行上下移动和/或左右移动。多个第一滚珠4311夹设在盖体450和导向件413之间,使得导向件413可以相对于盖体450左右移动,第三滚珠4313夹设在盖体450和第一承载件411之间,使得第一承载件411可以相对于盖体450左右移动。
69.当需要实现镜头100的对焦和/或竖直方向(或者说z方向)的防抖补偿时,可以给两个第一导电件422通电,两个第一导电件422在通电状态下可以产生磁场,其所产生的磁场和第一磁性件441与第二磁性件442的磁场相互作用以对第二承载件412产生推力,从而驱动第二承载件412在第一承载件411的通孔内上下移动,第二承载件412移动时可以带动镜头100上下移动以改变镜头100与感光芯片460之间的距离以实现对焦,镜头100上下移动时也可以补偿镜头100在平行于镜头100的光轴方向上的抖动。
70.当需要实现镜头100在第一子方向(或者说x方向)上的防抖时,可以给分别与第一磁性件441与第二磁性件442相对设置的两个第二导电件432中的一个或两个通电,该第二导电件432在通电状态下可以产生磁场,其所产生的磁场和第一磁性件441和/或第二磁性件442的磁场相互作用以对第一承载件411产生推力以驱动第一承载件411带动第二承载件412和导向件413基于多个第一滚珠4311和第三滚珠4313相对于盖体450和第一支架300在第一子方向(或者说x方向)上左右移动,第二承载件412移动时可以带动镜头100一起在第一子方向(或者说x方向)上左右移动,从而补偿镜头100在第一子方向上的抖动。
71.当需要实现镜头100在第二子方向(或者说y方向)上的防抖时,可以给与第三磁性件443相对设置的第二导电件432通电,该第二导电件432在通电状态下可以产生磁场,其所产生的磁场和第三磁性件443的磁场相互作用以对第一承载件411产生推力以驱动第一承载件411带动第二承载件412和导向件413基于多个第二滚珠4312和第三滚珠4313相对于盖体450和第一支架300在第二子方向(或者说y方向)上左右移动,第二承载件412移动时可以带动镜头100一起在第二子方向(或者说y方向)上左右移动,从而补偿镜头100在第二子方向(或者说y方向)上的抖动。
72.本技术实施例中,第二防抖组件500可以包括底板510和形变件520,底板510可以为第二防抖组件500的其他器件提供支撑,形变件520可以发生形变以带动感光元件200在垂直于镜头100的光轴方向(包括x方向和/或y方向)上移动,进而实现感光元件200的光学防抖功能。其中,形变件520可以包括固定部分521和形变部分522,固定部分521与底板510固定连接,形变部分522与感光元件200连接,形变部分522在通电状态下可发生形变,从而带动感光元件200相对于底板510沿垂直于镜头100的光轴方向移动。
73.其中,形变部分522可以采用形状记忆合金(shape memory alloys,sma)制作形成,形状记忆合金在通电状态下可以使得形状记忆合金被加热并使其变形,变形时可以使得形变部分522的长度发生变化,从而带动与其连接的感光元件200移动,实现感光元件200的防抖功能。
74.以上对本技术实施例提供的拍摄装置以及电子设备进行了详细介绍。本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术。同时,对于本领域的技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1