一种基于移动机器人的监狱监管系统的制作方法
1.本实用新型涉及监狱监管系统技术领域,特别涉及一种基于移动机器人的监狱监管系统。
背景技术:
2.监狱监管包括狱政管理、教育改造、刑罚执行、狱内侦查、劳动改造、安全生产、生活卫生等方面的内容;而监管安全稳定作为监管工作的第一责任,其中有无嫌犯逃脱、有无重大案件发生等属于监管安全的主要目标,而在发生任何影响监管安全的事项时,必须能够及时采取措施;当嫌犯出现逃脱或引发动乱时,需采用针对性的监管器械对其进行制止,在现阶段一般通过预警随身携带电击棒进行初步防控,这也就导致会出现在很多场合下防控不便利且不及时的问题,因此本实用新型研制了一种基于移动机器人的监狱监管系统,以解决现有技术中存在的问题,经检索,未发现与本实用新型相同或相似的技术方案。
技术实现要素:
3.本实用新型目的是:提供一种基于移动机器人的监狱监管系统,以解决现有技术中
4.本实用新型的技术方案是:一种基于移动机器人的监狱监管系统,包括机器人本体、安装于机器人本体上的监管摄像头、警报器及监管设备;所述监管设备包括座体,可相对于座体转动的架体,以及安装在架体上的监管器械。
5.优选的,所述座体上端外伸有呈柱形的声波驱离器,所述架体中部与声波驱离器嵌套配合,并可相对于声波驱离器转动;所述监管器械包括电击棒、催泪弹、捕捉网及麻醉针,所述架体上具有用于放置监管器械的第一腔室、第二腔室、第三腔室及第四腔室。
6.优选的,所述第一腔室设置至少一个,并沿架体外轮廓分布,每个所述第一腔室内壁呈倒置“ω”型,并用于容纳一个电击棒;所述第二腔室具有一个,内壁呈倒置“ω”型,并用于容纳若干沿声波驱离器中轴线方向分布的催泪弹;所述第三腔室设置至少一个,内壁围成密封结构,用于容纳捕捉网;所述第四腔室设置于架体外凸形成的板件上,呈贯穿的通孔状结构,用于放置麻醉针。
7.优选的,所述第一腔室内侧端面上具有第一磁吸件,所述电击棒端部具有与通电后的第一磁吸件相吸的第一吸附件;所述第二腔室内壁上均布若干第二磁吸件,所述催泪弹底部具有与通电后的第二磁吸件相吸的第二吸附件;所述第三腔室内侧端面或内壁上具有第三磁吸件,所述捕捉网上具有与通电后的第三磁吸件相吸的第三吸附件;所述第四腔室内部上具有第四磁吸件,所述麻醉针外壁上具有与通电后的第四磁吸件相吸的第四吸附件。
8.优选的,所述第一腔室侧壁呈开口状的两端采用橡胶条制作。
9.优选的,所述架体相对于声波驱离器中轴线转动的角度范围为90
°
~120
°
。
10.与现有技术相比,本实用新型的优点是:
11.本实用新型将机器人本体、监管摄像头及监管设备进行组合,基于机器人本体的灵活可移动性,实现监管摄像头对环境的实时、实地监控,并在发生异常情况时,启动监管设备,实现监管器械的针对性取用,并能够对异常情况进行及时有效的管控。
附图说明
12.下面结合附图及实施例对本实用新型作进一步描述:
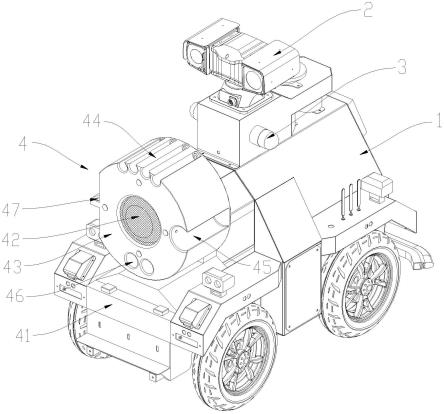
13.图1为本实用新型所述的一种基于移动机器人的监狱监管系统的结构示意图;
14.图2、图3为本实用新型所述监管设备的结构示意图;
15.其中:1、机器人本体,2、监管摄像头,3、警报器,4、监管设备,41、座体,42、声波驱离器,43、架体,431、板件,44、第一腔室,441、第一磁吸件,45、第二腔室,451、第二磁吸件,46、第三腔室,47、第四腔室,48、控制按钮。
具体实施方式
16.下面结合具体实施例,对本实用新型的内容做进一步的详细说明:
17.如图1所示,一种基于移动机器人的监狱监管系统,包括机器人本体1、安装于机器人本体1上的监管摄像头2、警报器3及监管设备4。
18.如图2、图3所示,监管设备4包括座体41,可相对于座体41转动的架体43,以及安装在架体43上的监管器械;具体的,座体41上端外伸有呈柱形的声波驱离器42,架体43中部与声波驱离器42嵌套配合,并可相对于声波驱离器42转动,受架体43上其他结构限制,一般控制架体43相对于声波驱离器42中轴线转动的角度范围为90
°
~120
°
;监管器械包括电击棒、催泪弹、捕捉网及麻醉针,因此架体43上具有用于放置监管器械的第一腔室44、第二腔室45、第三腔室46及第四腔室47。
19.如图2所示,第一腔室44设置至少一个,并沿架体43外轮廓分布,每个第一腔室44内壁呈倒置“ω”型,并用于容纳一个电击棒,呈开口状的两端采用橡胶条制作,方便电击棒的取放;第二腔室45具有一个,内壁呈倒置“ω”型,并用于容纳若干沿声波驱离器42中轴线方向分布的催泪弹;第三腔室46设置至少一个,内壁围成密封结构,用于容纳捕捉网;第四腔室47设置于架体43外凸形成的板件431上,呈贯穿的通孔状结构,用于放置麻醉针。
20.本实用新型中,监管设备4直接外露设置,因此需对各监管器械进行锁定,若能随时取用,则危险系数极大;因此,第一腔室44内侧端面上具有第一磁吸件441,电击棒端部具有与通电后的第一磁吸件441相吸的第一吸附件;第二腔室45内壁上均布若干第二磁吸件451,催泪弹底部具有与通电后的第二磁吸件451相吸的第二吸附件;第三腔室46内侧端面或内壁上具有第三磁吸件(未示出),捕捉网上具有与通电后的第三磁吸件相吸的第三吸附件;第四腔室47内部上具有第四磁吸件(未示出),麻醉针外壁上具有与通电后的第四磁吸件相吸的第四吸附件;其中,第一腔室44、第二腔室45、第三腔室46及第四腔室47对应的架体43端面上设置有控制磁吸件(包括第一磁吸件441、第二磁吸件451、第三磁吸件、第四磁吸件)与吸附件(包括第一吸附件、第二吸附件、第三吸附件、第四吸附件)断开的控制按钮48,且该控制按钮48只有在警报器3发出警报之后才能被触发;磁吸件选用电磁铁,在通电状态下具有磁性,能够与吸附件进行吸附,在断电状态下磁性消失,可与吸附件断开吸附。
21.同时也可采用罩壳设置在监管设备4外侧,当需取用监管器械时,将罩壳打开即
可。
22.基于上述涉及到的一种基于移动机器人的监狱监管系统,还涉及到控制方法,具体控制方法如下:
23.(1)机器人本体1按规划路径巡检,过程中通过可多方位转动的监管摄像头2对所处环境进行监察,并将画面实时传输给控制中心;
24.(2)巡检过程中,若无异常情况发生,机器人本体1继续按规划路径行走,且监管设备4中的磁吸件与吸附件始终处于相吸状态,控制按钮48无法被触发,监管器械无法被拿取;若有异常情况发生,机器人本体1就地停止,控制中心启动警报器3发出警报,同时也可视情况启动声波驱离器42;此时控制按钮48可以被触发,按下后磁吸件在断电状态下磁性消失,解除与吸附件的吸附,此时可拿取对应的监管器械;
25.(3)控制按钮48按下后,根据预先的设定,磁吸件断电状态为3~5s,例如:设定时间为4s,也就是说,监管人员可在4s内拿取监管器械,待4s过后,磁吸件与吸附件会再次相吸,需重新按下控制按钮48进行拿取。
26.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型,因此无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1