移动设备的感测辅助定位的制作方法
移动设备的感测辅助定位
1.相关申请案的交叉引用
2.本技术要求于2020年7月27日提交的发明名称为“移动设备的感测辅助定位(sensing-assisted positioning of mobile devices)”的第16/939,579号美国专利申请的优先权,该美国专利申请通过全文引用的方式并入本文中。
技术领域
3.本发明大体上涉及移动设备的定位过程,并且在特定实施例中,涉及使用感测来辅助定位。
背景技术:
4.用户设备(user equipment,ue)位置信息用于蜂窝通信网络,以改善网络的各种性能指标。例如,这样的性能指标可以包括容量、敏捷性和效率。当网络的元件在描述ue运行所在的无线环境的先验信息的上下文中利用ue的位置、行为、移动模式等时,可以实现改进。先验信息可以由与通信系统分开的感测系统收集。或者,使用集成系统收集先验信息可以有利于减少系统中的硬件(和成本);但是,使用与通信系统相同的硬件构建无线环境的射频地图是一个极具挑战性和开放性的问题。这个问题的难度与通信系统的有限分辨率、环境的动态性以及需要估计其电磁特性和位置的大量对象等因素相关。
5.已知使用ue来协助确定ue位置。在下行观测到达时间差(observed time difference of arrival,otdoa)中,ue接收来自服务基站和多个相邻基站的下行信号。随后,ue确定下行信号到达之间的时间差。ue向基站发送时间差信息。基站根据时间差信息确定ue的位置。当发送点和接收点是不同的bs时,otdoa会因残差偏置和偏斜而出现同步误差。在上行到达时间差(uplink time difference of arrival,u-tdoa)中,高灵敏度接收器在基站处接收来自ue的上行传输。接收器确定到达时间差,从而确定ue位置。已知u-tdoa由于处理时间的变化而受到时间戳延迟的影响。使用otdoa或u-tdoa的定位精度取决于ue的处理能力。处理能力可以包括例如在ue处实现的采样率。
技术实现要素:
6.位置管理功能可以将基于感测的技术与基于参考信号的技术结合起来,以增强位置确定。所述位置管理功能可以从传感器系统接收基于感测的配置文件,所述基于感测的配置文件包括ue的基于感测的观察;并且可以从通信系统接收所述ue的基于参考信号的观察。所述位置管理功能可以从所述基于感测的观察推导位置假设,并且可以从所述基于参考信号的观察确定所述ue的ue标识信息。通过结合所述基于感测的观察处理所述基于参考信号的观察,所述位置管理功能可以确定所述基于感测的观察与所述基于参考信号的观察之间的关联。然后,所述位置管理功能可以向具有从所述基于参考信号的观察确定的所述ue标识信息的所述ue发送从所述基于感测的观察推导的所述位置假设的指示。
7.基于在本技术的各个方面,传感器系统和通信系统是同一发送点设备的一部分,
避免了同步问题。此外,由于基带信号处理不依赖于ue,有限的ue基带处理能力并不妨碍本技术的各方面确定ue的位置假设。当从基于感测的观察推导位置假设时,位置管理功能可以使用多普勒(doppler)分析技术来解耦来自移动ue和静态杂波的回波。
8.根据本发明的一方面,提供了一种向设备指示所述设备的位置的方法。所述方法包括:从配置文件原点获取基于感测的配置文件,所述基于感测的配置文件包括所述设备的基于感测的观察;获取基于参考信号的观察;基于位置假设与设备标识信息之间的关联,向与所述设备标识信息相关联的设备发送所述位置假设的指示。所述位置假设是从所述基于感测的观察推导的。所述设备的所述设备标识信息是从所述基于参考信号的观察确定的。所述基于参考信号的观察是结合所述基于感测的观察处理的,从而确定所述位置假设与所述设备标识信息之间的所述关联。此外,本技术的各方面提供了一种用于执行本方法的装置和用于使处理器执行本方法的计算机可读介质。
附图说明
9.为了更完整地理解当前的实施例及其优点,现在以示例的方式参考以下结合附图的描述,在附图中:
10.图1以示意图示出了可以实现本发明的实施例的通信系统,所述通信系统包括示例性用户设备和示例性位置管理功能;
11.图2以框图示出了本技术的各方面提供的图1的通信系统的示例性用户设备;
12.图3以框图示出了本技术的各方面提供的图1的通信系统的示例性基站;
13.图4以框图示出了本技术的各方面提供的图1的通信系统的示例性位置管理功能;
14.图5以流程图示出了本技术的各方面提供的图1的网络的元件之间的交互,包括示例性基站、示例性用户设备和示例性位置管理功能;
15.图6示出了用于解释时钟偏置的曲线图;
16.图7以流程图示出了本技术的各方面提供的图1的网络的元件之间的交互,包括两个基站、用户设备和位置管理功能;
17.图8以流程图示出了本技术的各方面提供的图1的网络的元件之间的交互,包括两个基站、三个用户设备和位置管理功能;
18.图9a示出了示例性处理的功率延迟分布;
19.图9b示出了示例性处理的功率角分布;
20.图10以流程图示出了本技术的各方面提供的图1的网络的元件之间的感测回合交互,包括三个基站、两个用户设备和位置管理功能;
21.图11以流程图示出了本技术的各方面提供的图1的网络的元件之间的参考信号交换回合交互,包括三个基站、两个用户设备和位置管理功能;
22.图12以流程图示出了本技术的各方面提供的图1的网络的元件之间的观察处理回合和位置指示回合交互,包括三个基站、两个用户设备和位置管理功能;
23.图13示出了本技术的各方面提供的操作位置管理功能的方法中的示例性步骤;
24.图14示出了第一感测回合可以包括多个观察,并且根据本技术的方面,感测帧可以由多个观察形成;
25.图15示出了本技术的各方面提供的图1的基站的发送功率相对于时间的第一曲线
图和图1的基站的接收功率相对于时间的第二曲线图;
26.图16示出了本技术的各方面提供的图15的基站的发送功率相对于时间的第一曲线图和图1的基站的接收功率相对于时间的第二曲线图;
27.图17以信号流程图示出了本技术的各方面提供的实现上文描述的机制所涉及的一些信令,其中,用户设备用于发送上行ue关联指示符;
28.图18示出了本技术的各方面提供的图1中的单个基站作为四个波束的源;
29.图19示出了本技术的各方面提供的多个基站,其中,每个基站是四个波束的源。
具体实施方式
30.出于说明性目的,下文将结合附图更加详细地解释具体的示例性实施例。
31.本文阐述的实施例表示了足以实践所要求保护的主题的信息,并示出了实践这种主题的方法。在根据附图阅读以下描述后,本领域技术人员会理解所请求保护的主题的概念,并会认识到这些概念的应用在本文中并没有特别涉及。应当理解,这些概念和应用在本发明和所附权利要求书的范围之内。
32.此外,应当理解,本文中公开的执行指令的任何模块、组件或设备可以包括或以其它方式访问一个或多个非瞬时性计算机/处理器可读存储介质,所述介质用于存储信息,例如计算机/处理器可读指令、数据结构、程序模块和/或其它数据。非瞬时性计算机/处理器可读存储介质的示例的非详尽列表包括磁带盒,磁带,磁盘存储器或其它磁存储设备,只读光盘(compact disc read-only memory,cd-rom)、数字视频光盘或数字多功能光盘(digital video disc/digital versatile disc,dvd)、蓝光光盘
tm
等光盘,或其它光存储器,在任何方法或技术中实现的易失性和非易失性、可移动和不可移动介质,随机存取存储器(random-access memory,ram),只读存储器(read-only memory,rom),电可擦除可编程只读存储器(electrically erasable programmable read-only memory,eeprom),闪存或其它存储技术。任何这类非瞬时性计算机/处理器存储介质可以是一种设备的一部分,也可以访问或连接到一种设备。用以实现本文描述的应用或模块的计算机/处理器可读/可执行指令可以由这些非瞬时性计算机/处理器可读存储介质存储或以其它方式保存。
33.虽然当前的通信系统被装备成广泛地估计ue的位置,但未来的网络希望能够以厘米级的精度和超高的鲁棒性确定ue的位置。除了位置信息,还需要位姿信息。“位姿”信息是关于ue的速度和方向(姿态)的信息。有几个因素使获取准确的ue位置和位姿信息变得困难。第一,地面无线信道会造成损害,如多径干扰和阴影。这些损害可能被认为不利于获取准确的位姿信息。第二,来自相邻小区的干扰(由于频率复用)可能以加性噪声的形式表现出来,具有短期和长期的依赖性。这种干扰可以被证明对位置估计的精度有影响。第三,由于对允许电磁(electromagnetic,em)辐射的监管上限,位置估计的精度进一步受到通信系统可以辐射的最大功率限制的限制。第四,位置估计的精度甚至进一步受到整个系统带宽限制的限制。
34.图1以示意图示出了示例性通信系统100。通常,通信系统100能够使多个无线或有线元件传输数据和其它内容。通信系统100的目的可以是通过广播、窄播、用户设备到用户设备等提供内容(语音、数据、视频、文本)。通信系统100可以通过共享带宽等资源进行高效操作。
35.在本示例中,通信系统100包括第一用户设备(user equipment,ue)110a、第二ue 110b和第三ue 110c(单称或统称110)、第一无线接入网(radio access network,ran)120a和第二ran 120b(单称或统称120)、核心网130、公共交换电话网(public switched telephone network,pstn)140、互联网150、其它网络160和位置管理功能190。更广泛地,每个ue110可以被称为电子设备。尽管图1示出了一定数量的这些组件或元件,但是通信系统100中可以包括任何合理数量的这些组件或元件。
36.ue 110用于在通信系统100中进行操作和/或通信。例如,ue 110用于通过无线通信信道进行发送和/或接收。每个ue 110表示用于进行无线操作的任何合适的终端用户设备,并且可以包括如下设备(或可以称为):无线发送/接收单元(wireless transmit/receive unit,wtru)、移动站、移动用户单元、蜂窝电话、站点(station,sta)、机器类通信(machine-type communication,mtc)设备、物联网(internet of things,iot)设备、个人数字助理(personal digital assistant,pda)、智能手机、笔记本电脑、计算机、触摸板、无线传感器或消费型电子设备。
37.在图1中,第一ran 120a包括第一基站170a,第二ran包括第二基站170b(单称或统称170)。基站170也可以称为锚点或发送点(transmit point,tp)。每个基站170都用于与一个或多个ue 110通过接口无线连接,以便能够接入任何其它基站170、核心网130、pstn140、互联网150和/或其它网络160。例如,基站170可以包括(或可以是)几种熟知设备中的一个或多个,例如基站收发台(base transceiver station,bts)、基站(nodeb)、演进型基站(evolved nodeb,enodeb)、家庭基站(home enodeb)、下一代基站(gnodeb)、发送接收点(transmission and receive point,trp)、站点控制器、接入点(access point,ap)或无线路由器。任何ue 110都可以可选地或另外地用于与任何其它基站170、互联网150、核心网130、pstn 140、其它网络160或上述任意组合进行连接、接入或通信。通信系统100可以包括ran,例如ran 120b,其中,对应的基站170b经由互联网150接入核心网130,如图所示。
38.ue 110和基站170是通信设备的示例,这些通信设备可以用于实现本文中描述的部分或全部功能和/或实施例。在图1所示的实施例中,第一基站170a是第一ran 120a的一部分,第一ran 120a可以包括其它基站(未示出)、一个或多个基站控制器(base station controller,bsc)(未示出)、一个或多个无线网络控制器(radio network controller,rnc)(未示出)、中继节点(未示出)、元件(未示出)和/或设备(未示出)。任何基站170可以是如图所示的单独元件,也可以是分布在对应ran 120中的多个元件,等等。同样地,第二基站170b是第二ran 120b的一部分,第二ran 120b可以包括其它基站、元件和/或设备。每个基站170在特定地理区域(有时称为“小区”或“覆盖区域”)内发送和/或接收无线信号。小区可以进一步划分为小区扇区(sector)。例如,基站170可以使用多个收发器向多个扇区提供服务。在一些实施例中,可以存在无线接入技术支持的已建立的微微小区或毫微微小区。在一些实施例中,多个收发器可以通过使用多输入多输出(multiple-input multiple-output,mimo)技术等用于每个小区。所示的ran 120的数量只是示例性的。当设计通信系统100时,可以考虑任意数量的ran。
39.基站170使用射频(radio frequency,rf)无线通信链路、微波无线通信链路、红外线(infrared,ir)无线通信链路、可见光(visible light,vl)通信链路等无线通信链路,通过一个或多个空口180与一个或多个ue 110进行通信。空口180可以使用任何合适的无线接
入技术。例如,通信系统100可以在空口180中实现一种或多种正交或非正交信道接入方法,例如码分多址(code division multiple access,cdma)、时分多址(time division multiple access,tdma)、频分多址(frequency division multiple access,fdma)、正交fdma(orthogonal fdma,ofdma)或单载波fdma(single-carrier fdma,sc-fdma)。
40.基站170可以实现通用移动通讯系统(universal mobile telecommunication system,umts)陆地无线接入(universal terrestrial radio access,utra)以使用宽带cdma(wideband cdma,wcdma)建立空口180。在这种情况下,基站170可以实现如高速分组接入(high speed packet access,hspa)、演进的hpsa(evolved hpsa,hspa+)等协议,可选地包括高速下行分组接入(high speed downlink packet access,hsdpa)、高速分组上行接入(high speed packet uplink access,hsupa)或两者兼有。或者,基站170可以使用lte、lte-a、lte-b和/或5g新空口(new radio,nr)与演进的utms陆地无线接入(evolved utms terrestrial radio access,e-utra)建立空口180。可以设想,通信系统100可以使用多信道接入功能,包括如以上所描述的方案。用于实现空口的其它无线技术包括ieee 802.11、802.15、802.16、cdma2000、cdma2000 1x、cdma2000 ev-do、is-2000、is-95、is-856、gsm、edge和geran。当然,可以使用其它多址接入方案和无线协议。
41.ran 120与核心网130进行通信,以向ue 110提供各种服务,例如语音通信服务、数据通信服务和其它通信服务。ran 120和/或核心网130可以与一个或多个其它ran(未示出)进行直接或间接通信,这些ran可以或可以不直接由核心网130服务,并且可以或可以不与第一ran 120a和/或第二ran 120b使用相同的无线接入技术。核心网130还可以用作(i)ran 120或ue 110或两者与(ii)其它网络(例如pstn 140、互联网150和其它网络160)之间的网关接入。
42.ue 110可以使用射频(radio frequency,rf)无线通信链路、微波无线通信链路、红外线(infrared,ir)无线通信链路、可见光(visible light,vl)通信链路等无线通信链路,通过一个或多个侧行链路(sidelink,sl)空口180相互通信。sl空口180可以使用任何合适的无线接入技术并且可以基本上类似于ue 110与一个或多个基站170进行通信的空口180,或者它们可以基本上不同。例如,通信系统100可以在sl空口180中实现一种或多种信道接入方法,例如cdma、tdma、fdma、ofdma或sc-fdma。在一些实施例中,sl空口180可以至少部分地在非授权频谱上实现。
43.部分或全部ue 110可以包括使用不同无线技术和/或协议通过不同无线链路与不同无线网络进行通信的功能。ue 110可以通过有线通信信道与服务提供商或交换机(未示出)以及与互联网150进行通信,而不进行无线通信(或者另外进行无线通信)。pstn 140可以包括用于提供传统电话业务(plain old telephone service,pots)的电路交换电话网络。互联网150可以包括计算机网络和/或子网(内网),并包括互联网协议(internet protocol,ip)、传输控制协议(transmission control protocol,tcp)和用户数据报协议(user datagram protocol,udp)等协议。ue 110可以是能够根据多种无线接入技术进行操作的多模设备,并包括支持多种无线接入技术所需的多个收发器。
44.图2、图3和图4示出了可以实现本发明提供的方法和指导的示例性设备。具体地,图2示出了示例性ue 110,图3示出了示例性基站170,图4示出了示例性位置管理功能190。图1的通信系统100或任何其它合适的系统中可以使用这些组件。
45.如图2所示,ue 110包括至少一个处理单元200。处理单元200实现ue 110的各种处理操作。例如,处理单元200可以执行信号编码、数据处理、功率控制、输入/输出处理,或使ue 110能够在通信系统100中操作的任何其它功能。处理单元200还可以用于实现上文详述的部分或全部功能和/或实施例。每个处理单元200包括用于执行一个或多个操作的任何合适的处理设备或计算设备。每个处理单元200都可以包括微处理器、微控制器、数字信号处理器、现场可编程门阵列或专用集成电路等。
46.ue 110还包括至少一个收发器202。收发器202用于对数据或其它内容进行调制,以便由至少一个天线或网络接口控制器(network interface controller,nic)204传输。收发器202还用于对至少一个天线204接收到的数据或其它内容进行解调。每个收发器202包括用于生成进行无线或有线传输的信号和/或用于处理通过无线或有线方式接收的信号的任何合适的结构。每个天线204包括用于发送和/或接收无线信号或有线信号的任何合适的结构。ue 110中可以使用一个或多个收发器202。一个或多个天线204可以用于ed 110中。尽管收发器202被示出为单个功能单元,但收发器202也可以使用至少一个发送器和至少一个单独的接收器来实现。
47.ue 110还包括一个或多个输入/输出设备206或接口(例如连接到互联网150的有线接口)。输入/输出设备206支持与网络中的用户或其它设备进行交互。每个输入/输出设备206包括用于向用户提供信息或从用户接收信息的任何合适的结构,如扬声器、麦克风、小键盘、键盘、显示器或触摸屏,包括网络接口通信。
48.此外,ue 110包括至少一个存储器208。存储器208存储由ed 110使用、生成或收集的指令和数据。例如,存储器208可以存储用于实现上文描述的部分或全部功能和/或实施例并由一个或多个处理单元200执行的软件指令或模块。每个存储器208包括任何合适的一个或多个易失性和/或非易失性存储与检索设备。可以使用任何合适类型的存储器,例如随机存取存储器(random access memory,ram)、只读存储器(read only memory,rom)、硬盘、光盘、用户识别模块(subscriber identity module,sim)卡、记忆棒、安全数字(secure digital,sd)存储卡等。
49.如图3所示,基站170包括至少一个处理单元350、至少一个发送器352、至少一个接收器354、一个或多个天线356、至少一个存储器358和一个或多个输入/输出设备或接口366。可以使用收发器(未示出)代替发送器352和接收器354。调度器353可以耦合到处理单元350。调度器353可以包括在基站170内或与基站170分开操作。处理单元350实现基站170的各种处理操作,例如,信号编码、数据处理、功率控制、输入/输出处理或任何其它功能。处理单元350还可以用于实现上面更详细描述的部分或全部功能和/或实施例。每个处理单元350包括用于执行一个或多个操作的任何合适的处理或计算设备。例如,每个处理单元350可以包括微处理器、微控制器、数字信号处理器、现场可编程门阵列或专用集成电路。
50.每个发送器352包括用于生成信号以无线或有线传输到一个或多个ed或其它设备的任何合适的结构。每个接收器354包括用于处理从一个或多个ed或其它设备无线或有线接收的信号的任何合适的结构。尽管示出为单独的组件,但至少一个发送器352和至少一个接收器354可以组合成收发器。每个天线356包括用于发送和/或接收无线或有线信号的任何合适的结构。尽管此处共用天线356示出为与发送器352和接收器354两者耦合,但一个或多个天线356可以与一个或多个发送器352耦合,一个或多个单独的天线356可以与一个或
多个接收器354耦合。每个存储器358都包括任何合适的一个或多个易失性和/或非易失性存储与检索设备,例如上文结合ue 110描述的那些设备。存储器358存储由基站170使用、生成或收集的指令和数据。例如,存储器358可以存储软件指令或模块,所述软件指令或模块用于实现上文所述的一些或全部功能和/或实施例,并由一个或多个处理单元350执行。
51.每个输入/输出设备366可以与网络中的用户或其它设备进行交互。每个输入/输出设备366包括用于向用户提供信息或从用户接收/提供信息的任何合适的结构,包括网络接口通信。
52.在本技术的一些方面中,位置管理功能(location management function,lmf)190可以实现为位于核心网130处的物理独立实体,并连接到多个bs 170。在本技术的其它方面中,lmf 190可以通过处理单元350执行的逻辑实现为共同位于bs 170内部的逻辑实体。
53.如图4所示,lmf 190当实现为物理独立实体时包括至少一个处理单元450、至少一个发送器452、至少一个接收器454、一个或多个天线456、至少一个存储器458和一个或多个输入/输出设备或接口466。可以使用收发器(未示出)代替发送器452和接收器454。调度器453可以耦合到处理单元450。调度器453可以包括在lmf 190内或与lmf 190分开操作。处理单元450实现lmf 190的各种处理操作,例如,信号编码、数据处理、功率控制、输入/输出处理或任何其它功能。处理单元450还可以用于实现上面更详细描述的部分或全部功能和/或实施例。每个处理单元450包括用于执行一个或多个操作的任何合适的处理或计算设备。例如,每个处理单元450可以包括微处理器、微控制器、数字信号处理器、现场可编程门阵列或专用集成电路。
54.每个发送器452包括用于生成信号以无线或有线传输到一个或多个ed或其它设备的任何合适的结构。每个接收器454都包括用于处理从一个或多个bs 170、ue 110或其它设备通过无线方式或有线方式接收到的信号的任何合适的结构。尽管示出为单独的组件,但至少一个发送器452和至少一个接收器454可以组合成收发器。每个天线456包括用于发送和/或接收无线或有线信号的任何合适的结构。尽管此处共用天线456示出为与发送器452和接收器454两者耦合,但一个或多个天线456可以与一个或多个发送器452耦合,一个或多个单独的天线456可以与一个或多个接收器454耦合。每个存储器458都包括任何合适的一个或多个易失性和/或非易失性存储与检索设备,例如上文结合ue 110描述的那些设备。存储器458存储由lmf 190使用、生成或收集的指令和数据。例如,存储器458可以存储软件指令或模块,所述软件指令或模块用于实现上文所述的一些或全部功能和/或实施例,并由一个或多个处理单元450执行。
55.每个输入/输出设备466可以与网络中的用户或其它设备进行交互。每个输入/输出设备466包括用于向用户提供信息或从用户接收/提供信息的任何合适的结构,包括网络接口通信。
56.术语radar(雷达)是短语无线电方位角方向和测距(radio azimuth direction and ranging)的缩写。但是,术语radar不一定总是用所有的大写字母表示;“radar”、“radar”和“radar”同样有效。雷达通常用于检测对象的存在和位置。使用一种称为“脉冲雷达”的雷达的系统会辐射能量脉冲并接收来自一个或多个目标的脉冲回波。系统根据从给定目标返回的回波确定给定目标的位姿。使用另一种称为“脉冲压缩雷达”的雷达的系统使
用的能量与脉冲雷达系统中使用的能量相同。但是,在脉冲压缩雷达系统中,能量在时间和频率上分散,以降低瞬时辐射功率。
57.鉴于雷达系统通常用于星载应用,自由空间信道模型可用于近似(即,忽略多径传播和阴影等损害)雷达系统的操作。由此可见,在自由空间信道模型中,雷达系统可以辐射具有足够功率的脉冲,使得接收到的回波具有足以完成估计移动目标特征的任务的功率。这些特征可以包括例如速度和位置。
58.在地面应用中,多径传播和阴影是主要的损害。由于这些损害会削弱回波,因此位姿估计变得困难。已知移动设备用户和车辆的雷达横截面(radar cross section,rcs)不重要。因此,在存在从具有更重要rcs的杂波接收到的更强回波的情况下,来自移动设备用户和车辆的弱回波通常不会被固有噪声的商业雷达接收器感知到。
59.与机载应用相比,将雷达系统用于地面应用的另一个挑战是可识别性问题。在机载应用中,飞机、战斗机和导弹等移动目标具有不同的属性,从而使目标仅基于脉冲的返回回波才能相互区分。例如,民用飞机的雷达横截面比战斗机的雷达横截面大。此外,民用飞机通常以较低的速度飞行,机动性也低于战斗机。此外,导弹的飞行速度通常是最快飞机速度的三倍。
60.地面雷达系统可以被赋予确定小区内的数百个ue 110中的每个ue 110的位置的任务。假设来自ue 110的回波具有可检测强度,通常,该回波不允许ue 110之间存在区别。机载雷达系统的目标可以被认为是二元的,因为目标可以是友方也可以是敌方。相反,给定为许多ue 110确定位置的任务,地面雷达系统具有可归类为多假设测试问题的目标。
61.从不同的角度,目标可识别性可以被视为将观察与目标关联的问题。这种关联问题是任何被动遥感系统固有的,雷达就是其中之一。
62.位姿估计的损害包括系统复杂性和非合作性。非合作性与雷达系统的传统意图相关,即感测本质上非合作的目标,例如:导弹;速度超过限速的汽车;天体;或战斗机。当目标是活动的,即目标能够接收和响应雷达信号,并且目标愿意合作时,可以认为可识别性不是一个问题。例如,蜂窝网络中的ue 110可能有义务与蜂窝网络的元件合作,或者可能有义务遵循已经为蜂窝网络建立的一些准则。不幸的是,当主动位姿估计受益于合作性时,主动位姿估计会受到系统复杂性的影响。
63.位姿估计的系统复杂性损害包括与同步问题相关的问题和与目标的有限频谱/空间分辨率相关的问题等多种多样的问题。同步问题可以表示为与感测信号的接收端不精确地知道感测信号的发送端的时间和频率参考相关的问题。需要说明的是,在单静态雷达设置中,发送节点和接收节点都由相同的时钟运行,时间参考本质上是相同的。即使在双静态设置或多静态设置中,其中,感测信号的发送器和感测信号的接收器不共址,同步问题也可以通过频繁和准确的时钟校准来解决。这种校准可以通过发送器与接收器之间的高速和低延迟回程链路实现。在ue 110与ue 110要同步的网络实体之间实现完美同步可以被认为是一个具有挑战性的问题。
64.导致基于射频(radio frequency,rf)的定位系统(被动和主动)误差的因素包括:分辨率;同步;关联;非视线(non-line-of-sight,nlos)信号;信噪比(signal-to-noise ratio,snr)。
65.ue 110与bs 170之间的时钟同步以及每个ue 110的有限能力是阻碍使用当前蜂
窝系统内的定位子系统实现厘米级定位的显著问题。解决这两个问题可以被视为实现亚米级位置估计精度的步骤。需要说明的是,亚米级位置估计精度预计将是下一代蜂窝系统的一个特征。下一代蜂窝系统可以被称为“6g”。
66.时钟同步的问题可以通过使用用于确定ue 110的定位的雷达系统来解决。使用雷达系统进行位置确定可能被证明不会受到不完全同步的影响,主要原因有两个:(1)雷达系统利用对对抗性系统和环境影响高度稳定的时钟;(2)发送、接收和处理通常发生在同一锚节点,并参考单个计时器和振荡器。
67.每个ue 110的有限能力问题可以以与解决同步问题的方式完全不同的方式解决。随着许多用例的出现,特定蜂窝网络的用户可能会具有不同的处理能力和资源。例如,处理能力可以与采样率和峰均功率比(peak-to-average power ratio,papr)相关。例如,资源可以与发送功率相关。
68.在基于参考信号的定位系统(也称为主动定位系统)中,bs 170在下行(downlink,dl)rf参考信号中发送一些基带符号。ue 110接收dl参考信号,处理dl参考信号以提取基带符号,并使用上传(upload,ul)rf参考信号响应dl参考信号,该ul rf参考信号可以部分基于处理提取的基带符号。
69.给定的基于参考信号的定位系统的精度可以被视为依赖于处理dl参考信号的最弱节点的能力。蜂窝系统中的给定ue 110的能力通常不如同一蜂窝系统中的bs 170的能力。对于整个蜂窝系统的不同用例的所有ue 110,难以保证最小定位精度。
70.本文建议利用(被动)传感器定位系统来规避主动定位系统中存在的各种问题。这些问题包括同步问题和硬件能力有限问题。
71.地面蜂窝通信网络的固有特征是,多径信号和多代理环境在bs 170尝试基于源自bs 170的rf(例如,雷达)信号的回波确定给定ue 110的位置时造成困难。
72.具体地,蜂窝网络中的多径传播导致在bs 170处从不同大小和无数电特性的目标接收多个雷达回波。对于在bs 170处的接收器,为了能够估计到特定ue 110的范围和角度,接收器的任务是将特定ue 110的雷达回波与所有接收的雷达回波(包括来自环境中其它对象的雷达回波)隔离。可以示出,从对象(特定ue 110或其它对象)回波的功率量取决于对象的尺寸、形状和介电特性。不幸的是,其它对象(接收器不感兴趣的建筑物、地面、树叶等)可能示出为产生比ue 110引起的雷达回波大许多数量级的雷达回波。感兴趣的雷达回波可以示出为被较大的雷达回波掩盖。ue 110的rcs比其它对象的rcs小。总之,从静态对象接收的雷达回波与从ue 110接收的雷达回波的适当解耦是要解决的重要问题。
73.考虑到环境中存在多个代理,使用基于感测的系统确定特定ue 110的位置受到阻碍。实际上,给定的蜂窝通信网络挤满了许多ue 110。将为ue 110中的每一个确定位置。
74.使用蜂窝通信系统外部的基于感测的系统(例如雷达系统)可以被视为允许确定特定ue110的位置。
75.不幸的是,基于感测的系统观察,例如雷达回波,提供了很少的信息,这些信息可以被有用地利用来推断与特定雷达回波相关联的特定ue 110的标识。也就是说,给定从多个ue110接收的多个雷达回波,预期关于哪个雷达回波与哪个ue 110相关联将存在模糊性,反之亦然。
76.当观察与特定ue 110存在不正确的关联时,可以预期对特定ue 110的位置估计精
度具有影响。事实上,对精度的一些影响可能被描述为灾难性的。不准确的位置估计可以示出为导致特定ue 110的估计位置在连续时间的不稳定跳跃(从数十米到数百米的范围)。考虑到ue 110通常的有限运动学,这种位置跳跃在物理上是不合理的。
77.涉及bs 170和ue 110在蜂窝通信系统中交换dl和ul参考信号以允许确定ue 110的位置的传统方法是众所周知的。类似地,使用与蜂窝通信系统分开的基于感测的系统(例如雷达系统)以允许确定ue 110的位置的方法也是众所周知的。此外,将参考信号交换方法和基于硬件的基于感测的系统方法相结合的方法也受到了研究的关注。
78.可以表明,将参考信号交换方法和基于硬件的基于感测的系统方法结合起来的实现方法并不简单。事实上,参考信号交换方法和基于硬件的基于感测的系统方法可以被视为依赖于根本不同的技术。
79.综上所述,根据本技术的各方面,位置管理功能从传感器系统接收可以确定ue的基于感测的观察的基于感测的配置文件,并从通信系统接收ue的基于参考信号的观察。位置管理功能可以从基于感测的观察推导特定位置假设,并且可以从基于参考信号的观察确定ue的ue标识信息。通过结合所述基于感测的观察处理所述基于参考信号的观察,所述位置管理功能可以确定所述基于感测的观察与所述基于参考信号的观察之间的关联。然后,位置管理功能可以向具有从基于参考信号的观察确定的ue标识信息的ue发送与该ue相关联的特定位置假设的指示,其中,特定位置假设已经从基于感测的观察推导。
80.根据本技术的方面,传感器系统辐射能量脉冲,并从一个或多个ue 110接收脉冲的回波。由于脉冲传播的无线介质的共享性质,很明显,单个脉冲可以导致从多个ue 110返回的雷达回波。传感器系统记录每个雷达回波,以进行处理。对这些记录的雷达回波中的信息进行处理会使信息浓缩到有限的特征集。例如,特征可以包括:往返延迟;到达角;多普勒偏移;接收功率。这些特征可在下文中称为“观察”。
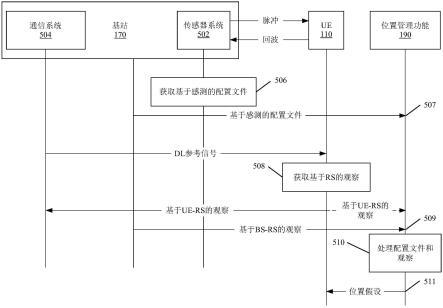
81.图5以流程图示出了基站170、ue 110和位置管理功能190之间的交互。基站170包括传感器系统502和通信系统504。
82.一般来说,位置确定从感测回合开始,继续是参考信号交换回合,继续是处理回合,并以位置指示回合结束。需要说明的是,感测回合和参考信号交换回合可以以任何顺序发生,甚至可以同时发生。
83.最初,传感器系统502发送感测信号,该感测信号例如可以是雷达脉冲。在感测回合期间,传感器系统502从ue 110和通信系统100的环境中的其它对象接收感测信号的回波。
84.传感器系统502然后可以获取(步骤506)基于感测的配置文件。基于感测的配置文件可以表示几何范围测量和/或角度测量。回想一下,基于雷达的传感器系统通常使用围绕中心轴连续旋转360度的收发器(未特别示出)。需要说明的是,基于雷达的传感器系统不一定机械旋转以引导光束的方向。在其它基于雷达的传感器系统中,光束可以电子旋转,而硬件保持静态。几何范围测量可以理解为与收发器与回波原点之间的距离相关。角度测量可以理解为涉及与围绕中心轴的圆上的参考角偏移的角度跨度,其中,回波的原点可以通过接收回波的角度跨度来表征。在完成基于感测的配置文件的获取(步骤506)后,bs 170将基于感测的配置文件发送到位置管理功能190。位置管理功能190获取(步骤507)基于感测的配置文件。在lmf 190获取(步骤507)基于感测的配置文件的上下文中,bs 170可以一般地
称为配置文件原点。
85.在正常操作期间,通信系统504发送下行(downlink,dl)参考信号,该dl参考信号可以由包括ue 110的通信系统100中的各种实体接收和处理。dl参考信号通常是高功率和宽带信号。
86.在接收到dl参考信号后,ue 110可以获取(步骤508)基于ue参考信号(基于ue-rs)的观察。然后,ue 110可以向基站170发送上行(uplink,ul)参考信号。ul参考信号可以包括基于ue-rs的观察和ue 110的标识的指示。可选地,或附加地,ue 110可以将基于ue-rs的观察与ue 110的标识的指示一起发送到位置管理功能190。位置管理功能190获取(步骤509)基于bs-rs的观察。
87.通信系统504从ue 110接收基于ue-rs的观察。方便地,如上所述,基于ue-rs的观察包括已经获取基于ue-rs的观察的ue 110的ue标识信息。响应于接收基于ue-rs的观察,基站170可以获取基于bs-rs的观察。然后,基站170可以将基于bs-rs的观察发送到位置管理功能190。方便地,基于bs-rs的观察包括作为基于ue-rs的观察的一部分接收的ue标识。
88.在接收到基于感测的配置文件和基于rs的观察两者后,位置管理功能190可以处理(步骤510)配置文件和观察。
89.在一个方面,基于感测的配置文件的处理(步骤510)可以通过多普勒分析来完成。位置管理功能190可以使用多普勒分析来将源自(移动)ue 110的回波与源自环境中(静态)杂波的回波分开。源自(移动)ue 110的回波可以被视为前景信号。源自(静态)杂波的回波可以被视为背景信号。
90.基于组合几何范围测量和角度测量,可以基于配置文件确定基于感测的观察,并且位置管理功能190可以从基于感测的观察推导与作为回波的原点的ue 110相关联的位置。
91.基于感测的配置文件和基于bs-rs的观察的处理(步骤510)可以涉及根据基于感测的配置文件确定基于感测的观察,并且随后可以导致将基于bs-rs的观察中的特定一个与基于感测的观察中的特定一个匹配。需要说明的是,由于位置已经从基于感测的观察推导,并且ue标识信息已经从基于bs-rs的观察确定,因此处理(步骤510)可以部分地包括将从特定的基于感测的观察推导的位置与从特定的基于bs-rs的观察确定的ue标识信息相关联。
92.然后,位置管理功能190可以向具有从基于参考信号的观察确定的ue标识信息的ue 110发送(步骤511)从基于感测的观察推导的位置的指示。需要说明的是,位置的指示不一定是为了向ue 110发送(步骤511)。相反,位置的指示可用于其它任务。其它任务包括预测ue 110的未来移动性。其它任务包括管理从bs 170发送的波束。波束管理将在下文讨论。
93.例如,基于感测的观察可以是往返时间(round trip time,rtt)测量。在这种情况下,为了匹配目的,方便的是,基于bs-rs的观察也是rtt测量。
94.rtt可以被认为是信号从bs 170传输到ue 110,然后返回bs 170所耗费的时间。对于传感器系统502,在一个示例中,出站信号是雷达脉冲,而入站信号是雷达脉冲的回波。对于通信系统504,出站信号是dl参考信号,入站信号是包括基于ue-rs的观察的ul参考信号。
95.在图5中,网络中只有一个bs 170。因此,可以认为在bs 170处执行的测量将受到时钟偏置的影响。时钟偏置可以通过回顾图6中所示的曲线来理解。图6中所示的曲线包括
表示基站时间帧的第一线t
bs
(t)和表示用户设备时间帧的第二线t
ue
(t)。第一线由第一函数t
bs
(t)=t描述。第二线由第二函数t
ue
(t)=αt+β描述,其中,α表示ue时钟偏斜,β表示ue时钟偏置。
96.bs 170在时间t
1,n
发送的参考信号在时间t
2,n
=t
1,n
+τ到达ue 110,其中,τ是单向传播延迟。ue 110接收dl参考信号,处理dl参考信号,访问数据以获取基于ue-rs的观察,并向基站170发送包括基于ue-rs的观察的ul参考信号。这四个动作都会导致ue延迟,δn,其中,
97.δn=接收延迟+处理延迟+访问延迟+发送延迟。
98.ue 110在时间t
3,n
发送的ul参考信号在时间t
4,n
=t
3,n
+τ到达bs 170。
99.通信系统504可以确定参考信号往返时间,rtt
p
。在通信系统504处确定rtt
p
涉及获取发送dl参考信号的时间(时间t
1,n
)与接收ul参考信号的时间(时间t
4,n
)之间的差值。即,
[0100][0101]
在获取(步骤506)基于感测的往返时间rtts的情况下,需要说明的是,在ue 110处没有延迟,因为雷达脉冲仅仅被反射,而不是被处理。因此,一旦雷达脉冲到达ue 110且rtts=2τ,回波就从ue 110离开。如果基于感测的往返时间rtts是根据基于rs的往返时间rtt
p
来考虑的,则可以考虑δn=0,以进行rrts估计。还可以认为,随着基于rs的观察的ue延迟δn分量接近零,预计处理(步骤510)配置文件(以确定基于感测的观察)和观察以在基于感测的观察(rtts)与基于rs的观察(rtt
p
)之间找到匹配的精度将提高。
[0102]
根据硬件速度、访问机制和在ue 110处的协议栈内对接收到的数据执行多少处理,ue延迟δn可以比单向传播延迟τ大几个数量级。有问题的是,这导致了一种期望,即rtt
p
>>rtts。
[0103]
但是,本技术的方面涉及ue 110确定ue延迟δn值的估计δ
′n,并将估计δ
′n报告给位置管理功能190。在接收估计δ
′n之后,在位置管理功能190处的配置文件和观察的处理(步骤510)可以涉及对基于bs-rs的观察rtt
p
应用校正。位置管理功能190可以通过从中减去估计δ
′n,即rtt
p
′
=rtt
p-δ
′n,来确定基于bs-rs的观察rtt
p
的校正版本rtt
p
′
。然后,位置管理功能190可以尝试在校正的基于rs的观察rtt
p
′
与基于感测的观察rtts之间找到匹配。
[0104]
此外,如果bs 170具有ue时钟偏斜α的估计α
′
,则可以从确定对基于rs的观察的更准确的校正。在本技术的各方面中,ue时钟偏斜α的估计α
′
可以由ue 110确定。在本技术的其它方面中,ue时钟偏斜α的估计α
′
可以通过全网同步过程确定。
[0105]
如上所述,lmf 190接收基于感测的配置文件和基于bs-rs的观察rtt
p
。基于感测的配置文件和基于bs-rs的观察的处理(步骤510)可以涉及根据基于感测的配置文件确定基于感测的观察rtts,并且随后可以导致将基于bs-rs的观察rtt
p
中的特定一个与基于感测的观察rtts中的特定一个匹配。
[0106]
根据本技术的各方面,在bs 170和ue 110适当同步的情况下,lmf 190可以接收和
处理基于rs的单向观察。也就是说,lmf 190可以仅基于dl参考信号(从bs 170到ue 110)和/或仅基于ul参考信号(从ue 110到bs 170)接收观察。当在这种情况下处理(步骤510)观察时,lmf 190可以预期将基于rs的单向观察与表示基于感测的观察rtts的一半的值匹配。
[0107]
在上文中,ue 110的位置假设是使用仅在一个bs 170处的感测推导的。这可以被称为“单静态感测”。在本技术的各方面中,可以使用两个bs 170推导ue 110的位置假设。这可以称为“双静态感测”。
[0108]
在通信子系统和感测子系统使用统一的宽脉冲宽带波形(例如在ofdm上下文中使用)并且基站没有全双工无线电的场景中,单静态配置可能会遇到问题。该问题可能与发送脉冲与接收回波之间的功率间隙相关。通常,发送脉冲中的功率如此强,接收回波中的功率如此弱,以至于无论发送/接收链如何隔离,即使从发送侧到接收侧出现小泄漏/感应也会导致接收回波完全淹没。为了解决这个问题,可以使用双静态感测配置。在双静态感测配置中,发送感测信号(脉冲)的发送点(transmission point,tp)(例如,bs 170)不同于接收回波的tp。这样,接收侧的无线电就不会被发送侧的高功率信号淹没,因为发送侧与接收侧之间的距离很大。
[0109]
基于在接收回波的tp处获取的配置文件获取的范围数据不能称为rtt,因为脉冲没有进行“返回”行程。相反,基于在接收回波的tp处获取的配置文件获取的范围数据可以称为双中心范围(bi-centric range,bcr)数据。当bcr数据在感测回合期间生成时,因此在参考信号交换回合期间应生成等效量。等效量便于观察处理步骤中的匹配。bcr数据的收集在图7的流程图中示出。第一bs 170a发送下行参考信号(downlink reference signal,dl-rs)。响应于接收dl-rs,ue 110向第二bs 170b发送上行参考信号(uplink reference signal,ul-rs)。以上述第一实施例熟悉的方式,优选地将ue内延迟最小化。
[0110]
在本技术的一个方面中,通过将ul-rs立即携载到dl-rs,将ue内延迟最小化。在本技术的另一方面,通过ue 110准确测量并向位置管理功能190报告ue内延迟,可以将ue内延迟对bcr数据精度的影响最小化,从而可以校准基于bs-rs的观察。
[0111]
在图7的流程图中,示出了第一基站170a、第二基站170b、ue 110和位置管理功能190之间的交互。虽然没有具体示出,但第一基站170a和第二基站170b可以理解为包括类似于图5中的传感器系统502的传感器系统。虽然没有具体示出,但第一基站170a和第二基站170b可以理解为包括类似于图5中的通信系统504的通信系统。
[0112]
最初,第一基站170a发送感测信号,该感测信号例如可以是雷达脉冲。在感测回合期间,第二基站170b的传感器系统从ue 110和通信系统100环境中的其它对象接收感测信号的回波。
[0113]
然后,传感器系统可以获取(步骤706)基于感测的配置文件。在完成基于感测的配置文件的获取(步骤706)后,第二基站170b将基于感测的配置文件发送到位置管理功能190。位置管理功能190获取(步骤707)基于感测的配置文件。在lmf 190获取(步骤707)基于感测的配置文件的上下文中,bs 170可以一般地称为配置文件原点。
[0114]
第一bs 170a发送可由ue 110接收的下行(downlink,dl)参考信号。dl参考信号可以是高功率宽带信号。根据本技术的各方面,ue 110用于接收dl参考信号并生成上传(upload,ul)参考信号(reference signal,rs)。然后,ue 110向第二bs 170b发送ul-rs。
[0115]
第二bs 170b的通信系统从ue 110接收ul参考信号(reference signal,rs)。方便
地,如上所述,ul-rs包括已经生成ul-rs的ue 110的标识信息。响应于接收ul-rs,通信系统获取(步骤708)基于bs-rs的观察。基于特定的基于bs-rs的观察,通信系统可以确定ue 110的标识信息,并将标识信息与特定的基于bs-rs的观察相关联。
[0116]
在步骤708中由通信系统获取的基于bs-rs的观察中的至少一些与在步骤706中可以由感测系统基于获取的基于感测的配置文件确定的基于感测的观察中的至少一些具有相同类型并且来自相同的ue 110(在多个ue 110的上下文中)。在完成基于bs-rs的观察的获取(步骤708)后,第二bs 170b将基于bs-rs的观察发送到位置管理功能190。位置管理功能190获取(步骤709)基于bs-rs的观察。
[0117]
位置管理功能190处理(步骤710)在步骤707中获取的基于感测的配置文件,以确定基于感测的观察并推导ue 110的位置。在一个方面,基于感测的配置文件的处理(步骤710)可以通过多普勒分析来完成。位置管理功能190可以使用多普勒分析来将来自(移动)ue 110的回波与来自环境中(静态)杂波的回波分开,这些回波可以被视为背景信号。
[0118]
位置管理功能190还处理(步骤710)在步骤709中获取的基于bs-rs的观察,以从基于bs-rs的观察确定ue 110的ue标识信息。
[0119]
基于相同的观察,位置管理功能190的处理(步骤710)可以涉及从基于感测的配置文件获取基于感测的观察,并且随后可以使某些基于bs-rs的观察与某些基于感测的观察匹配。需要说明的是,由于基于感测的观察与位置假设相关联,并且基于rs的观察与ue标识信息相关联,因此匹配(步骤710)可用于将位置与ue标识信息相关联。
[0120]
然后,位置管理功能190可以向与ue标识信息相关联的ue 110发送(步骤711)位置的指示。需要说明的是,位置的指示不一定是为了向ue 110发送(步骤711)。相反,位置的指示可用于其它任务。其它任务包括预测ue 110的未来移动性。其它任务包括管理从bs170发送的波束。波束管理将在下文讨论。
[0121]
因此,可以看出,可以使用双静态感测配置,使得接收侧的无线电不会被发送侧的高功率信号淹没。
[0122]
图7中概述的方法可能不能有效地定位具有不同用例的所有ue 110。
[0123]
例如,在一个方面,基于感测的配置文件的处理(步骤710)已经描述为通过多普勒分析进行。多普勒分析用于将来自(移动)ue 110的回波与来自环境中(静态)杂波的回波分开。需要说明的是,给定的ue 110可以是固定的(例如,物联网设备)或具有可变速度(例如,在车辆中,ue 110可能偶尔停止)。
[0124]
存在ue 110具有不重要的rcs的场景,使得即使在多普勒分析之后也无法检测到ue 110。这种场景的一个示例是行人在街道上行走。
[0125]
存在ue 110无法接收dl参考信号或发送ul参考信号的场景。给定的ue 110可能无法以足以允许产生精确几何测量的信噪比(signal-to-noise ratio,snr)或足以允许产生精确几何测量的带宽发送/接收。
[0126]
到图7所示方法的讨论阶段,称为“多径”的传播现象,即通过反射/折射与杂波的信号交互,是唯一被考虑的传播现象。需要说明的是,还有另一种传播现象,即“阴影”。当连接ue 110和bs 170的直接路径(三维欧几里德空间中的视线)被对象阻挡时,发生阴影,该对象会衰减(通过吸收)此传播信号的所有能量视线或充分衰减传播信号,使得直接传播信号的接收snr低于ue 110处硬件的检测阈值。
[0127]
在不考虑阴影发生的方式的情况下,阴影会导致一种称为非视线(non-line-of-sight,nlos)的现象,这意味着从间接路径接收到最强的信号,而接收器却不知道该路径是间接的。因此,与直接路径相比,任何范围/角度的估计都有由额外距离引起的偏置,信号已经传输到接收器。由于这种阴影偏置是加性的(以类似于时钟偏置的方式),阴影偏置将根据基于感测的观察与基于rs的观察之间的匹配破坏位置信息与ue标识信息的关联。当感测信号(脉冲)和dl参考信号在相同的频率范围内以相同的功率发送时,破坏可以减轻。后者通常不是这种情况,因为感测信号的大功率、宽带宽和高频是其决定性特征。
[0128]
部分解决这些问题的方案涉及ue 110使用侧链(sidelink,sl)通信在它们之间进行通信。图8以流程图示出了第一基站170a、第二基站170b、第一ue 110a、第二ue 110b、第三ue 110和位置管理功能190之间的交互。位置管理功能190可以创建ue 110的簇,并选择一个或多个候选ue 110作为簇头(cluster head,ch)。选择为ch(当只有一个时)的ue 110优选地具有非常适合ch的特征。也就是说,被选择为ch的ue 110应该:是移动的;没有功率限制;没有带宽限制;并且具有到bs 170的los链路。
[0129]
在图8中,考虑第一ue 110a已经被选择为ch。
[0130]
最初,位置管理功能190除了选择第一ue 110a作为ch的指示之外,还向ue 110发送(步骤802)sl通信调度的指示。
[0131]
根据sl通信时间表,第一ue 110a与第二ue 110b和第三ue 110c交换sl通信。通过该交换,作为ch的第一ue 110a获取ue间测量。对于两个示例,第一ue 110a可以使用测距和接近发现来获取与簇中的每个ue 110相关联的ue间测量。
[0132]
然后,第一ue 110a向位置管理功能190发送其簇头标识符(identifier,id)的指示和基于与其它ue 110的sl通信获取的ue间测量。位置管理功能190接收(步骤804)簇头id并接收(步骤806)ue间测量。然后,位置管理功能190继续获取(步骤808)第一ue 110a的配置文件和观察,获取(步骤808)可以例如以图5的流程图的方式或图7的流程图的方式进行。
[0133]
通过处理(步骤810)在步骤808中获取的配置文件和观察,位置管理功能190可以获取第一ue 110a的位置。通过结合第一ue 110a的位置处理ue间测量,位置管理功能190可以确定簇中其它ue 110的相应位置。在确定位置时,位置管理功能190将位置发送(步骤811)到ue 110。需要说明的是,位置的指示不一定是为了向ue 110发送(步骤811)。相反,位置的指示可用于其它任务。其它任务包括预测ue 110的未来移动性。其它任务包括管理从bs 170发送的波束。波束管理将在下文讨论。
[0134]
不幸的是,当环境中存在多个ue 110时,关于某些基于rs的观察与某些基于感测的观察的匹配(在步骤510、710或810中)仍然存在模糊性。
[0135]
在上文已经指出,感测回合包括发送感测信号的传感器系统502。事实上,传感器系统502可以发送多个连续的感测信号。
[0136]
还讨论了基于感测的配置文件的处理(在步骤510、710或810中)的多普勒分析部分可用于将前景信号与背景信号分开。前景信号被假定为由于ue 110的回波。背景信号被假定为由于其它对象的回波,包括静态杂波。不幸的是,其它对象的回波相对于ue 110的回波可能不成比例地大。
[0137]
基于感测的配置文件的处理(在步骤510、710或810中)的多普勒分析部分可以是包括ue 110的非零速度的估计的完整多普勒分析。在这种情况下,作为杂波消除过程的一
部分,杂波的每个对象可以被视为速度为零的静态对象。可以表明,更长持续时间的感测回合使前景信号与背景信号的分开更好。在距离雷达的情况下,基于感测的配置文件的处理(在步骤510、710或810中)的多普勒分析部分的一个结果可以被看作是处理的功率延迟配置文件(处理的pdp),在方向雷达的情况下,被看作是处理的功率角度配置文件(处理的pap)。
[0138]
图9a中示出了一个示例性处理的pdp。图9b中示出了一个示例性处理的pap。
[0139]
在完成杂波消除过程时,位置管理功能190可以用于估计(i)往返时间(round-trip time,rtt),基于处理的pdp,和/或(ii)到达角(angle-of-arrival,aoa)测量,基于处理的pap估计,和/或(iii)速度,基于配置文件(pdp和/或pap)中发现的所有峰值。
[0140]
在通信系统100中的任何给定时间,多于一个bs 170可以发送感测信号和参考信号。因此,位置管理功能(location management function,lmf)190可以接收基于rs的观察,并且可以接收来自多于一个bs 170中的每一个的基于感测的配置文件。
[0141]
在距离雷达的情况下,响应于接收基于感测的配置文件,lmf 190可以为每个bs 170确定多个往返时间(round-trip-time,rtt)测量。与特定bs 170相关联的处理的pdp可以被认为具有时间轴和pdp功能轴(见图9a)。多个rtt测量可以被确定为处理的pdp的每个峰值的时间轴值。也就是说,如果处理的pdp中存在三个峰值,则lmf 190将识别三个rtt测量。
[0142]
lmf 190可以指定多个bs 170中的一个bs 170作为时间参考。然后,lmf 190可以基于从每个bs 170的rtt测量中减去时间参考bs 170的rtt测量来获取每个bs 170的多个到达rtt差(rtt-difference-of-arrival,rttdoa)标量值。应该清楚的是,以这种方式获取时间参考bs 170的rttdoa标量值没有价值。
[0143]
在方向雷达的情况下,响应于接收基于感测的配置文件,lmf 190可以为每个bs 170确定多个到达角(angle-of-arrival,aoa)测量。与特定bs 170相关联的处理的pap可以被认为具有角度轴和pap功能轴(见图9b)。多个aoa测量值可以被确定为处理的pap的每个峰值的角度轴值。也就是说,如果处理的pap中存在三个峰值,则lmf 190将识别三个aoa测量。
[0144]
lmf 190可以指定多个bs 170中的一个bs 170作为空间参考。然后,lmf 190可以基于从每个bs 170(除了空间参考bs 170)的aoa测量中减去空间参考bs 170的aoa测量,获取每个bs 170(除了空间参考bs 170)的多个到达角度差(angle-difference-of-arrival,adoa)标量值。应该清楚的是,以这种方式获取空间参考bs 170的adoa标量值没有价值。
[0145]
需要说明的是,在某些情况下,时间参考bs 170和空间参考bs 170可以是相同的bs 170。
[0146]
通过收集每个非参考bs 170的标量值,可以在lmf 190处生成多个差分向量。
[0147]
多个基于感测的位置假设向量可以通过从每个差分向量形成一个标量值的组合来确定。
[0148]
为不同于时间参考bs 170和空间参考bs 170的那些bs 170获取的rttdoa或adoa可以彼此配对以形成多个位置假设向量。
[0149]
在图10的流程图中,示出了第一基站170a、第二基站170b、第三基站170c、第一ue110a、第二ue 110b和位置管理功能190之间的感测回合交互。尽管没有具体示出,但第一
基站170a、第二基站170b和第三基站170c可以理解为包括类似于图5中的传感器系统502的传感器系统。尽管没有具体示出,但第一基站170a、第二基站170b和第三基站170c可以理解为包括类似于图5中的通信系统504的通信系统。
[0150]
每个bs 170的传感器系统发送感测信号,该感测信号例如可以是雷达脉冲。在感测回合期间,每个bs 170从ue 110和通信系统100环境中的其它对象接收感测信号的回波。
[0151]
第一bs 170a的传感器系统可以在接收到回波时获取(步骤1006a)基于感测的配置文件。第一bs 170b的传感器系统可以在接收到回波时获取(步骤1006b)基于感测的配置文件。第一bs 170c的传感器系统可以在接收到回波时获取(步骤1006c)基于感测的配置文件。
[0152]
基于感测的配置文件可以包括几何范围测量和角度测量。在完成每个基于感测的配置文件的获取(步骤1006a、1006b和1006c)时,每个bs 170将基于感测的配置文件发送到位置管理功能190。位置管理功能190获取(步骤1007a、1007b和1007c)基于感测的配置文件。在lmf 190获取(步骤1007)基于感测的配置文件的上下文中,bs 170可以一般地称为配置文件原点。
[0153]
在图11的流程图中,示出了第一基站170a、第二基站170b、第三基站170c、第一ue110a、第二ue 110b和位置管理功能190之间的参考信号交换回合交互。尽管没有具体示出,但第一基站170a、第二基站170b和第三基站170c可以理解为包括类似于图5中的传感器系统502的传感器系统。尽管没有具体示出,但第一基站170a、第二基站170b和第三基站170c可以理解为包括类似于图5中的通信系统504的通信系统。
[0154]
图11的流程图可以被认为是图10的流程图的延续。
[0155]
第一bs 170a发送可以由第一ue 110a和第二ue 110b接收的下行(downlink,dl)参考信号(reference signal,rs)。dl参考信号可以是高功率宽带信号。根据本技术的各方面,每个ue 110用于接收dl-rs并生成上传(upload,ul)rs。然后,每个ue 110向第一bs 170a发送ul-rs。
[0156]
第一bs 170a的通信系统从每个ue 110接收ul-rs。方便地,如上所述,ul-rs包括已经生成ul-rs的ue 110的标识信息。响应于接收ul-rs,第一bs 170a的通信系统获取(步骤1108a)基于bs-rs的观察。基于特定的基于bs-rs的观察,通信系统可以确定ue 110的标识信息,并将标识信息与特定的基于bs-rs的观察相关联。
[0157]
在步骤1108a中由第一bs 170a的通信系统获取的基于bs-rs的观察中的至少一些与在步骤1006a中由第一bs 170a的感测系统获取的基于感测的配置文件中的至少一些来自相同的ue 110。此外,在步骤1108a中,由第一bs 170a的通信系统获取的基于bs-rs的观察中的至少一些与可以由lmf 190根据基于感测的配置文件确定的基于感测的观察具有相同的类型。
[0158]
在完成基于bs-rs的观察的获取(步骤1108a)后,第一bs 170a将基于bs-rs的观察发送到位置管理功能190。位置管理功能190获取(步骤1109a)基于bs-rs的观察。
[0159]
第二bs 170b发送可以由第一ue 110a和第二ue 110b接收的dl-rs。dl参考信号可以是高功率宽带信号。根据本技术的各方面,每个ue 110用于接收dl-rs并生成ul-rs。然后,每个ue 110向第二bs 170b发送ul-rs。
[0160]
第二bs 170b的通信系统从每个ue 110接收ul-rs。方便地,如上所述,ul-rs包括
已经生成ul-rs的ue 110的标识信息。响应于接收ul-rs,第二bs 170b的通信系统获取(步骤1108b)基于bs-rs的观察。基于特定的基于bs-rs的观察,通信系统可以确定ue 110的标识信息,并将标识信息与特定的基于bs-rs的观察相关联。
[0161]
在步骤1108b中由第二bs 170b的通信系统获取的基于bs-rs的观察中的至少一些与在步骤1006b中由第二bs 170b的感测系统获取的基于感测的配置文件中的至少一些来自相同的ue 110。此外,在步骤1108b中,由第一bs 170b的通信系统获取的基于bs-rs的观察中的至少一些与可以由lmf 190根据基于感测的配置文件确定的基于感测的观察具有相同的类型。
[0162]
在完成基于bs-rs的配置文件的获取(步骤1108b)后,第二bs 170b将基于bs-rs的配置文件发送到位置管理功能190。位置管理功能190获取(步骤1109b)基于bs-rs的配置文件。
[0163]
第三bs 170c发送可以由第一ue 110a和第二ue 110b接收的dl-rs。dl参考信号可以是高功率宽带信号。根据本技术的各方面,每个ue 110用于接收dl-rs并生成ul-rs。然后,每个ue 110向第三bs 170c发送ul-rs。
[0164]
第三bs 170c的通信系统从每个ue 110接收ul-rs。方便地,如上所述,ul-rs包括已经生成ul-rs的ue 110的标识信息。响应于接收ul-rs,第三bs 170c的通信系统获取(步骤1108c)基于bs-rs的观察。基于特定的基于bs-rs的观察,通信系统可以确定ue 110的标识信息,并将标识信息与特定的基于bs-rs的观察相关联。
[0165]
在步骤1108c中由第三bs 170c的通信系统获取的基于bs-rs的观察中的至少一些与在步骤1006c中由第三bs 170c的感测系统获取的基于感测的配置文件中的至少一些来自相同的ue 110。此外,在步骤1108c中,由第一bs 170c的通信系统获取的基于bs-rs的观察中的至少一些与可以由lmf 190根据基于感测的配置文件确定的基于感测的观察具有相同的类型。
[0166]
在完成基于bs-rs的观察的获取(步骤1108c)后,第三bs 170c将基于bs-rs的观察发送到位置管理功能190。位置管理功能190获取(步骤1109c)基于bs-rs的观察。
[0167]
在图12的流程图中,示出了第一基站170a、第二基站170b、第三基站170c、第一ue110a、第二ue 110b和位置管理功能190之间的观察处理回合和位置指示回合交互。尽管没有具体示出,但第一基站170a、第二基站170b和第三基站170c可以理解为包括类似于图5中的传感器系统502的传感器系统。尽管没有具体示出,但第一基站170a、第二基站170b和第三基站170c可以理解为包括类似于图5中的通信系统504的通信系统。
[0168]
图12的流程图可以被认为是图8的流程图的延续。
[0169]
位置管理功能190处理(步骤1210)在步骤1007a、1007b和1007c中获取的基于感测的配置文件,作为推导多个基于感测的位置假设向量的一部分。基于感测的配置文件的处理(步骤1210)可以包括清理,在一个方面,该清理可以通过多普勒分析来完成。位置管理功能190可以使用多普勒分析来将来自(移动)ue 110的回波与来自环境中(静态)杂波的回波分开,这些回波可以被视为背景信号。
[0170]
位置管理功能190还处理(步骤1210)在步骤1109a、1109b和1109c中获取的基于bs-rs的观察,以从基于bs-rs的观察确定ue 110的ue标识信息和基于rs的位置假设向量。
[0171]
基于相同的观察,位置管理功能190的处理(步骤1210)可以使基于rs的位置假设
向量中的特定位置假设向量与基于感测的位置假设向量中的特定位置假设向量匹配。需要说明的是,由于基于感测的位置假设向量可以被认为比基于rs的位置假设向量更准确,并且基于rs的位置假设向量与ue标识信息相关联,匹配(步骤1210)可用于将第一ue基于感测的位置假设向量与从基于rs的观察获取的第一ue标识信息相关联,以及将第二ue基于感测的位置假设向量与从基于rs的观察获取的第二ue标识信息相关联。
[0172]
然后,位置管理功能190可以向与第一ue标识信息相关联的第一ue 110a发送(步骤1211a)第一ue基于感测的位置假设向量的指示。位置管理功能190还可以向与第二ue标识信息相关联的第二ue 110b发送(步骤1211b)第二ue基于感测的位置假设向量的指示。需要说明的是,位置的指示不一定是为了向ue 110发送(步骤1211a、1211b)。相反,位置的指示可用于其它任务。其它任务包括预测ue 110的未来移动性。其它任务包括管理从bs 170发送的波束。波束管理将在下文讨论。
[0173]
图13示出了操作lmf 190的方法中的示例性步骤。图13的方法从lmf 190获取(步骤1307)基于感测的配置文件开始。在图10的上下文中,基于感测的配置文件的获取(步骤1307)可以在获取步骤1007a、1007b和1007c中找到。lmf 190还获取(步骤1309)基于rs的观察。在图11的上下文中,基于rs的观察的获取(步骤1309)可以在获取步骤1009a、1009b和1009c中找到。lmf 190处理(步骤1310)在步骤1307中获取的基于感测的配置文件和在步骤1309中获取的基于bs-rs的观察,以确定多个基于感测的位置假设向量,多个基于rs的位置假设向量,并将选定的基于感测的位置假设向量与每个ue 110的ue标识信息相关联。然后,位置管理功能190可以向与不同的ue标识信息相关联的ue 110发送(步骤1311)相应选择的基于感测的位置假设向量的指示。
[0174]
如图13所示,处理配置文件和观察的步骤(步骤1310)包括多个子步骤。处理(步骤1310)观察包括根据基于感测的配置文件确定(步骤1312)基于感测的观察,并从基于感测的观察推导(步骤1314)基于感测的位置假设向量。此外,处理(步骤1310)观察包括根据基于参考信号的观察确定(步骤1316)每个ue 110的基于rs的位置假设向量和ue标识信息。甚至此外,处理(步骤1310)观察包括确定(步骤1318)特定基于感测的位置假设向量与特定基于rs的位置假设向量之间的匹配。
[0175]
根据示例,可以更详细地考虑从基于感测的观察推导(步骤1314)基于感测的位置假设向量。
[0176]
如上所述,可以基于所获取的(步骤1307)基于感测的配置文件确定(步骤1312)基于感测的观察。
[0177]
考虑到:在lmf 190处从第一bs 170a接收的基于感测的pdp在4μs和6μs处具有峰值;在lmf 190处从第二bs 170b接收的基于感测的pdp在2μs和3.5μs处具有峰值;在lmf 190处从第三bs 170c接收的基于感测的pdp在1μs和3μs处具有峰值。lmf 190可以指定第三bs 170c作为时间参考。lmf 190可以实现从与其它两个bs 170的基于感测的pdp的峰值相关联的时间轴值{4,6}中减去与第三bs 170c的基于感测的pdp的峰值相关联的时间轴值{1,3}。与第一bs 170a的基于感测的pdp中的峰值相关联的两个rtt时间轴值的集合可以通过减法转换为四个rttdoa标量值的差分向量,{4
–
1,4
–
3,6
–
1,6
–
3}={3,1,5,3},并且四个rttdoa标量值的差分向量可以与第一bs 170a相关联。类似地,与第二bs170b的基于感测的pdp中的峰值相关联的两个rtt时间轴值的集合可以通过减法转换为四个rttdoa标量值的
差分向量,{2
–
1,2
–
3,3.5
–
1,3.5
–
3}={1,
–
1,2.5,0.5},并且四个rttdoa标量值的差分向量可以与第二bs 170b相关联。
[0178]
然后,lmf 190可以生成多个基于感测的位置假设向量,其中,每个基于感测的位置假设向量具有对应于ue 110中的一个的位置的潜力。每个基于感测的位置假设向量可以通过从与第一bs 170a相关联的差分向量中选择一个rttdoa标量值和从与第二bs 170b相关联的差分向量中选择一个rttdoa标量值来生成。因此,对于具有四个rttdoa标量值的本示例,可以以这种方式生成16个位置假设向量。
[0179]
如上所述,步骤1318涉及确定特定基于感测的位置假设向量与特定基于rs的位置假设向量之间的匹配。由于基于感测的观察已经被组织成基于基于感测的rttdoa标量值的16个基于感测的位置假设向量,lmf 190还可以将在步骤1309中获取的基于rs的观察布置成基于rs的rttdoa标量值的基于rs的位置假设向量。
[0180]
lmf 190可以通过自从接收第一bs 170a的第一ue 110a的基于rs的rtt观察减去从第三bs 170c接收的第一ue 110a的基于rs的rtt观察,获取第一ue 110a的第一基于rs的rttdoa标量值。
[0181]
lmf 190可以通过自从接收第二bs 170b的第一ue 110a的基于rs的rtt观察减去从第三bs 170c接收的第一ue 110a的基于rs的rtt观察,获取第一ue 110a的第二基于rs的rttdoa标量值。
[0182]
第一ue 110a的第一基于rs的rttdoa标量值和第二基于rs的rttdoa标量值可以用于形成第一ue 110a的基于rs的位置假设向量。
[0183]
通过自从第一bs 170a接收的第二ue 110b的基于rs的rtt观察减去从第三bs 170c接收的第二ue 110b的基于rs的rtt观察,lmf 190可以获取第二ue 110b的第一基于rs的rttdoa标量值。
[0184]
通过自从第二bs 170b接收的第二ue 110b的基于rs的rtt观察减去从第三bs 170c接收的第二ue 110b的基于rs的rtt观察,lmf 190可以获取第二ue 110b的第二基于rs的rttdoa标量值。
[0185]
第二ue 110b的第一基于rs的rttdoa标量值和第二基于rs的rttdoa标量值可以用于形成第二ue 110b的基于rs的位置假设向量。
[0186]
在确定特定基于感测的位置假设向量与特定基于rs的位置假设向量之间的匹配之前,lmf 190可以用于在16个基于感测的位置假设向量当中过滤被确定为不相关的那些基于感测的位置假设向量。
[0187]
这种过滤可以被认为是缩小假设的空间。例如,可以存在可以在其中找到ue 110的部署区域的地图(或定义良好的边界)。16个基于感测的位置假设向量中的一些可能被发现在部署区域之外,并且因此可能被滤除为不相关的。16个基于感测的位置假设向量中的一些可能被发现与低概率相关的位置相关,并且因此可能被滤除为不相关的。还可以基于可用于单个ue 110的先验信息滤除一些基于感测的位置假设向量。先验信息可以包括ue 110的先前位置、ue 110的移动模式等。
[0188]
需要说明的是,每个位置假设向量的精度可以被认为与在基于感测的位置假设向量与基于rs的位置假设向量之间找到正确匹配的程度直接相关。减少位置误差的策略包括增加每个位置假设向量的大小。
[0189]
可以增加位置假设向量的大小的一种方式涉及在单个bs 170处获取的位置假设向量中包括更多特征(步骤1008)。用于包括在位置假设向量中的示例特征可以包括:打包范围;角度;以及功率。
[0190]
可以增加位置假设向量大小的另一种方式涉及将在几个bs 170处观察到的特征串联到单个大位置假设向量中。
[0191]
有利地,在较高维空间中,表示基于感测的观察与基于rs的观察的点之间存在更大的距离(例如,欧几里德距离)。因此,在较高维空间中,可以以降低的误差概率找到特定基于感测的位置假设向量与特定基于rs的位置假设向量之间的匹配。
[0192]
如上文所述,可以通过增加位置假设向量的大小来降低在查找特定基于感测的位置假设向量与特定基于rs的位置假设向量之间的匹配时的误差概率。增加可以通过为单个bs包括更多功能来实现。这些特征可以包括打包范围、角度和功率。增加也可以通过将来自多个bs的特征串联在单个大位置假设向量中来实现。无论如何,一般的想法是将关联问题带到更高维的空间,在那里点之间的距离(例如,欧几里德距离)可能更大。
[0193]
图14示出了第一感测回合1402-1可以包括多个观察。在所示的示例中,多个包括n个观察。第二感测回合1402-2还包括n个观察。此外,第r感测回合1402-r包括n个观察。此外,第(r+1)感测回合1402-r+1包括n个观察。
[0194]
通过在时间上聚集观察,也可以增加位置假设向量的维数。具体来说,lmf 190可以将当前回合和先前几个回合的观察串联起来,以形成更长的位置假设向量。
[0195]
在图14中,当前回合被称为第r感测回合1402-r。lmf 190可以将第一感测帧1404-1指定为包括第r感测回合1402-r和先前回合,包括第一感测回合1402-1和第二感测回合1402-2。然后,lmf 190可以连接第一感测帧1404-1中的所有(r
×
n)观察,以形成第一位置假设向量。lmf 190可以将第二感测帧1404-2指定为包括第(r+1)感测回合1402-r+1和先前回合,包括第二感测回合1402-2和第r感测回合1402-r。然后,lmf 190可以连接第二感测帧1404-2中的所有(r
×
n)观察,以形成第二位置假设向量。
[0196]
需要说明的是,使用几个连续的感测回合并不意味着定位间间隔将更长,这将导致ue110被定位的频率较低,从而存在位置估计延迟。相反,可以认为定位仍然响应于每个感测回合1402发生。在包括多个感测回合的感测帧1404中收集的观察的级联可以被认为与所谓的“滑动窗口”相关。
[0197]
ue 110可以为在lmf 190处执行的配置文件和观察的处理提供一些帮助。
[0198]
事实上,ue 110可以用于检测从bs 170的传感器系统502接收的感测信号(例如,雷达脉冲),并对检测信号进行操作。已知的是,检测信号以相对高的功率和相对宽的频带发送。由于这些特征,感测信号通常作为白噪声出现在ue 110中。脉冲雷达中使用了示例高功率宽带感测信号。但是,还存在其它类型的感测信号,例如脉冲压缩调频连续波(frequency modulated continuous wave,fmcw)雷达中使用的感测信号类型。已知脉冲压缩fmcw中使用的感测信号的类型允许ue 110检测感测信号的存在。
[0199]
需要说明的是,检测感测信号应被识别为与解码感测信号分开。ue 110可以能够通过检查是否可以在从模数转换器输出的原始样本中找到签名来检测感测信号的存在。例如,ue 110可以识别感测信号相位中的循环行为。对于另一个示例,ue 110可以检测功率波动中的模式。同一ue 110可能无法从感测信号估计小规模参数,其中,估计这些参数取决于
特定组件的校准。
[0200]
图15示出了bs 170的发送功率相对于时间的第一曲线1500-1和bs 170的接收功率相对于时间的第二曲线1500-2。第一曲线1500-1示出了感测脉冲1502的发送。
[0201]
在三个ue 110中的每个ue 110处,感测脉冲1502产生回波信号1504,如预期的那样。第一ue 110a引起第一回波信号1504-1。第二ue 110b引起第二回波信号1504-2。第三ue 110c引起第三回波信号1504-3。
[0202]
但是,此外,在三个ue 110中的每个ue 110处,检测感测脉冲1502。响应于检测,每个ue发送宽带ue关联指示符1506。第一ue 110a发送第一上行(uplink,ul)ue关联指示符1506-1。第二ue 110b发送第二ul ue关联指示1506-2。第三ue 110c发送第三ul ue关联指示1506-3。每个ul ue关联指示符1506可以包括发送输ul ue关联指示符1506的ue 110的标识信息。因此,可以看到ul ue关联指示符1506以帮助lmf 190将刚刚在ul ue关联指示符1506之前接收的回波信号1504与ul ue关联指示符1506中包括的ue 110的标识相关联。
[0203]
如果ue 110发送ul ue关联指示符1506得足够快,并且具有足够宽的频带,则ue关联指示符1506很有可能在两个回波信号1504之间到达bs 170,如图15所示。
[0204]
图16示出了图15的第一曲线1500-1和bs 170的接收功率相对于时间的第二曲线1600-2,类似于图15的第二曲线1500-2。图15的第二曲线1500-2的回波信号1504在图16的第二曲线1600-2中重复。当第一ue 110a发送第一ue关联指示1606-1时,第一ue关联指示1606-1不是宽带。因此,图16的第二曲线1600-2示出了在bs 170接收到第二回波信号1504-2之后,bs 170可以接收第一ue关联指示符1606-1的时间部分。
[0205]
即使在图16所示的情况下,也可以看到第一ue关联指示符1606-1以帮助lmf 190滤除一些关联可能性。
[0206]
考虑到这一背景,检测到感测信号1502存在的那些ue 100可以立即向bs 170发送相应的ul ue关联指示符1506。由于目标是将ul ue关联指示符1506合并到关联过程中,因此由ue 110发送并在bs 170处接收的ul ue关联指示符1506可以满足如下期望:在接收从该ue 110反向散射的回波信号1504与从下一个最近的ue 110反向散射的回波信号1504之间接收ul ue关联指示符1506。满足这样的期望取决于ue 110与网络的密度、平均回波信号间到达时间段和ue 110处的处理延迟。ue 110处的处理延迟可以从接收脉冲1502中检测到签名的时刻开始测量,直到发送ul ue关联指示符1506。
[0207]
显然,ue 110不能等待网络实体预先调度ul授权(例如,通过下行控制信息或物理下行控制信道),以便可以发送ul ue关联指示符1506,因为调度ue在最直接的时隙平均需要几百微秒,在此期间,即使是最远的ue 110的回波信号1504也已经到达bs 170。相反,一旦ue 110检测到签名,就提示ue 110发送ul ue关联指示符1506。ue 110不等待帧/子帧/时隙边界的开始来启动ul ue关联指示符1506的发送。作为一个示例,类似于wi-fi中的载波侦听多址(没有冲突避免)的机制可以是候选机制。作为另一个示例,基于码分多址的技术可以是候选技术。作为另一个示例,ue 110可以在模拟域中发送ul ue关联指示符,同时将接收到的模拟信号即时返回给bs 170(略作修改,从而留下唯一签名),而不将接收到的模拟信号传递到数字域和/或基带域进行解码等。
[0208]
图17以信号流程图示出了实现上文描述的机制所涉及的一些信令,其中,ue 110用于发送ul ue关联指示符。需要说明的是,每个ue 110可以被分配用于ul ue关联指示符
发送的正交码。因此,bs 170可以检测到代码,以隐式地理解发送ue 110的标识。因此,在这种情况下,在ul ue关联指示中发送ue id是不必要的。但是,在ue束共享相同正交码或感测信号由多个bs 170发送的情况下,进一步的信息,例如ue标识和bs标识,可以包括在ul ue关联指示符中。
[0209]
图17所示,第一基站170a可以向ue 110发送1702a配置指令。此外,第二基站170b还可以向ue 110发送1702b配置指令。配置信息可以包括正交码、频率等ul ue关联指示发送参数。
[0210]
然后,感测回合可以bs 170发送脉冲并且接收回波继续。ue 110可以使用从第一bs170a接收的配置指令向第一bs 170a发送ul ue关联指示符1704a。ue 110还可以使用从第二bs 170b接收的配置指令向第二bs 170b发送1704b ul ue关联指示符。在接收到ul ue关联指示符后,第一bs 170a可以向lmf 190提供1706a基于感测的配置文件和从ul ue关联指示符提取的信息。lmf 190可以获取1707a基于感测的配置文件和从ul ue关联指示符提取的信息。在接收到ul ue关联指示符后,第二bs 170b可以向lmf 190提供1706b感测配置文件和从ul ue关联指示符提取的信息。lmf 190可以获取1707b基于感测的配置文件和从ul ue关联指示中提取的信息。
[0211]
然后,可以在bs 170与ue 110之间执行参考信号交换回合,使得bs 170可以获取1708基于rs的观察。lmf 190可以从第一bs 170a获取1709a基于rs的观察,并且可以从第二bs 170b获取1709b进一步的基于rs的观察。
[0212]
位置管理功能190处理(步骤1710)在步骤1707a和1707b中获取的基于感测的配置文件,作为推导多个基于感测的位置假设向量的一部分。基于感测的配置文件的处理(步骤1710)可以包括基于从ul ue关联指示符提取的信息将基于感测的配置文件与ue 110关联。
[0213]
位置管理功能190还处理(步骤1710)在步骤1709a和1709b中获取的基于rs的观察,以从基于rs的观察确定ue 110的ue标识信息和基于rs的位置假设向量。
[0214]
基于相同的观察,在从ul ue关联指示符提取的信息的帮助下,位置管理功能190的处理(步骤1710)可以使基于rs的位置假设向量中的特定位置假设向量与基于感测的位置假设向量中的特定位置假设向量匹配。需要说明的是,由于基于感测的位置假设向量可以被认为比基于rs的位置假设向量更准确,并且基于rs的位置假设向量与ue标识信息相关联,匹配(步骤1710)可用于将ue基于感测的位置假设向量与从基于rs的观察获取的ue标识信息相关联,以及将第二ue基于感测的位置假设向量与从基于rs的观察获取的第二ue标识信息相关联。
[0215]
然后,位置管理功能190可以向与ue标识信息相关联的ue 110发送(步骤1711)基于ue感测的位置假设向量的指示。
[0216]
如上所述,从感测回合获取的角度相关测量(配置文件)可用于将标识与未识别的感测测量相关联。假设发送感测信号和参考信号是全方位(即,没有任何波束成形)进行的,使得分别估计回波的到达角(angle-of-arrival,aoa)和接收到的ul rs的aoa测量允许在标识和与未识别的感测测量之间发生关联。
[0217]
一般来说,能够估计aoa(接收时)的感测子系统也能够通过模拟波束成形或数字波束成形在受限角扇区(发送时)内的给定方向上聚焦感测信号。
[0218]
发送波束成形可以被示出为允许减少关联过程的模糊性。感测信号可以在窄波束
id一起报告给第一另外bs 170a,并且可以期望第一ue 110a将波束id c-2-3与用于第二ue 110b的ue id一起报告给第二另外bs 170c。
[0225]
三个bs 170可以向lmf 190提供bs 170已经从ue 110接收到的信息。lmf 190获取指示第一ue 110a处于ids a-2-1、b-2-2和c-2-4的波束中的信息。lmf 190还获取指示第二ue 110b处于ids a-2-2、b-2-2和c-2-3的波束中的信息。因此,lmf 190获取允许明确定位两个ue 110的信息。
[0226]
根据本技术的各个方面,lmf 190可以协调每个bs 170的感测信号扫描图案以最小化干扰,从而允许ue 110清楚地检测波束id。
[0227]
根据本技术的各个方面,感测信号和参考信号以与上述公开中描述的方面类似的方式发送。在已经描述的这一点中,感测信号和参考信号的发送顺序并不重要。在这种替代方案中,首先发送感测信号。从返回的回波中,aoa测量可以与多个ue 110中的每个ue 110相关联。然后,当向ue 110发送波束成形dl参考信号时,可以使用关于返回回波的到达角度的信息。每个ue 110接收dl参考信号并且估计aod
p
值。然后,每个ue 110向bs 170发送ul参考信号,其中,ul参考信号包括估计的aod
p
和ue id的指示。然后,lmf 190可以基于ue id将aoas与接收到的估计aod
p
相关联。
[0228]
根据本技术的各方面,lmf 190可以通过向每个ue 110指定ul授权来调度在bs 170处接收ul参考信号。
[0229]
应当理解,本文所提供的实施例方法的一个或多个步骤可以由对应的单元或模块执行。例如,数据可以由发送单元或发送模块发送。数据可以由接收单元或接收模块接收。数据可以由处理单元或处理模块处理。相应单元/模块可以是硬件、软件或其组合。例如,一个或多个单元/模块可以是集成电路,例如现场可编程门阵列(field programmable gate array,fpga)或专用集成电路(application-specific integrated circuit,asic)。应当理解,如果这些模块是软件,则这些模块可以由处理器根据需要全部或部分检索,单独或集体检索用于处理,根据需要在一个或多个实例中检索,并且这些模块本身可以包括用于进一步部署和实例化的指令。
[0230]
虽然在说明的实施例中示出了特征的组合,但并不需要结合所有的特征来实现本发明各种实施例的优点。换句话说,根据本发明的实施例设计的系统或方法不一定包括图中任何一个所示的所有特征或图中示意性所示的所有部分。此外,一个示例性实施例的选定特征可以与其它示例性实施例的选定特征组合。
[0231]
虽然已参考说明性实施例描述了本发明,但此描述并不意图限制本发明。参考本说明书后,说明性实施例的各种修改和组合以及本发明的其它实施例对于本领域技术人员而言是显而易见的。因此,所附权利要求书涵盖任何此类修改或实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1