机器人、存储餐桌信息的方法、装置、设备和存储介质与流程
本技术涉及机器人领域,并且更具体地,涉及机器人领域中一种机器人、存储餐桌信息的方法、装置、设备和存储介质。
背景技术:
1、随着时代的不断发展,互联网技术变得越来越成熟,互联网技术飞速发展,推动了科学技术的逐渐成熟化,各种智能化产品逐渐涌入人们的生活。例如,智能电视、智能手表、智能运动手环、机器人、智能洗碗机等等,这些智能化产品的出现替代了一部分人类的工作,减轻了人力劳动,提高了人们的生活水平,带给了人们极大的便利。
2、示例性的,在餐饮行业,为了减轻一部分工作人员的工作量,可以使用机器人来完成取餐送餐工作。对于机器人而言,需要完成的工作就是根据预先接收的送餐指令,精准地将餐食运输至客人所在餐桌,同时提醒客人取走餐食,完成送餐任务。在机器人自动送餐的过程时,为了确保每一次送餐任务的圆满完成,机器人首先需要基于各类传感器采集的多个数据,得到待送餐区域的地图数据。进一步地,机器人还需要将待送餐区域的每一个餐桌的桌号信息存储至待送餐区域的地图数据中。为了保证餐桌的桌号信息和餐桌实际位置信息的匹配性,即每一个餐桌的桌号信息与实际位置信息需要满足一一对应关系,就需要在存储每一个餐桌的桌号信息的同时,获取每一个餐桌在待送餐区域的地图数据中的坐标信息,并根据每一个餐桌在待送餐区域的地图数据中的坐标信息确定出每一个餐桌在待送餐区域的地图数据中的位置,进一步在待送餐区域的地图数据中,将每一个餐桌的桌号信息存储至其在待送餐区域的地图数据对应的位置。通过将每一个餐桌的桌号信息与实际位置信息进行一一对应,可以保证机器人将餐食配送至与其相对应的客人,避免出现餐食配送错误的情况。
3、一种可能的实现过程中,机器人将每一个餐桌的桌号信息与实际位置信息进行一一匹配的过程时,机器人可以根据用户的指令运动至目标餐桌。进一步,机器人可以通过传感器采集的数据,获取目标餐桌在待送餐区域的地图数据中的坐标信息。同时,工作人员手动将目标餐桌的桌号信息输入至机器人,这样机器人可以实现餐桌的桌号信息与实际位置信息的一一对应关系。按照上述的操作流程,可以依次完成在待送餐区域的地图数据中的每一个餐桌的桌号信息与实际位置信息的匹配工作。
4、上述过程中,对于待送餐区域中的每一个餐桌,其对应的桌号信息的存储过程主要是通过工作人员手动输入,当餐厅面积比较大,待送餐区域的餐桌数量比较多时,手动输入每一个餐桌的桌号信息的方法不仅会造成大量的人力消耗,而且容易出现餐桌之间桌号信息存储混乱、错误的情况,存储效率比较低。
5、综上,在对每一个餐桌的桌号信息进行存储的过程中,如何保证待送餐区域的地图数据中所存储桌号信息的正确性,提高餐桌的桌号信息的存储效率,减小人力的消耗,成为了亟需解决的问题。
技术实现思路
1、本技术提供了一种机器人、存储餐桌信息的方法、装置、设备和存储介质,该方法能够避免了手动存储引起的餐桌的桌号信息与其实际位置信息、坐标信息不匹配的问题,提高了桌号信息的存储效率,减小人力的消耗。
2、第一方面,提供了一种机器人,该机器人存储有待送餐区域的地图数据,该机器人包括存储器和处理器,该存储器中存储有可执行程序代码,其特征在于,该处理器用于调用并执行该可执行程序代码时实现如下步骤:在该待送餐区域的目标餐桌处,获取该机器人的位姿信息,该机器人的位姿信息包括该机器人在该目标餐桌处的坐标信息和朝向角,该待送餐区域包括m个餐桌,m为大于或等于1的整数,该目标餐桌为该m个餐桌中的任意一个餐桌;接收终端设备发送的该目标餐桌的桌号信息;基于该目标餐桌的桌号信息和该机器人的位姿信息,生成该目标餐桌的餐桌信息,将该目标餐桌的餐桌信息添加至该待送餐区域的地图数据中。
3、上述技术方案,提出一种通过机器人接收终端发送的桌号信息,从而实现机器人自动存储桌号信息的过程,进一步地,在存储桌号信息的过程中,主要依赖待送餐区域的每一个餐桌的桌号信息与机器人在每一个餐桌处的位姿信息之间的一一对应关系,根据餐桌的桌号信息和机器人在餐桌处的位姿信息,生成餐桌的餐桌信息,进一步将餐桌信息添加至待送餐区域的地图中。该方法能够使机器人智能化地实现餐桌的桌号信息存储过程,同时兼顾了餐桌的桌号信息与机器人在每一个餐桌处的位姿信息之间的匹配关系,在保证了餐桌的桌号信息存储的正确性的同时,提高了存储的效率,避免了传统的手动输入桌号信息方法导致的失误,减轻了人力的消耗。
4、结合第一方面,在某些可能的实现方式中,基于该目标餐桌的桌号信息和该机器人的位姿信息,生成该目标餐桌的餐桌信息,将该目标餐桌的餐桌信息添加至该待送餐区域的地图数据中之后,该处理器用于调用并执行该可执行程序代码时还实现如下步骤:根据该待送餐区域的地图数据中的该目标餐桌的餐桌信息,更新该待送餐区域的地图数据。
5、上述技术方案中,在待送餐区域的地图数据中,将每一个餐桌的餐桌信息添加至待送餐区域的地图数据之后,实时更新待送餐区域的地图数据。能够避免由于机器人出现故障或停止工作时,造成的餐桌信息存储失败的问题,节省了存储的流程和工作量,极大的提高了机器人存储桌号信息的效率。
6、结合第一方面和上述实现方式,在某些可能的实现方式中,该m个餐桌的每一餐桌对应有识别码,该识别码用于使该机器人接收该终端设备发送的该目标餐桌的桌号信息,该识别码包括二维码、条形码、点阵码中的任意一种或多种。
7、结合第一方面和上述实现方式,在某些可能的实现方式中,该每一餐桌对应唯一的识别码。
8、结合第一方面和上述实现方式,在某些可能的实现方式中,该终端设备与该机器人通过以下中的任意一种或多种:宽带连接、无线网络通信wi-fi连接、蓝牙连接、紫蜂zigbee连接、蜂窝数据连接。
9、上述技术方案中,在终端设备与机器人连接时,提供了多种可以选择的连接方式,包括有线连接和无线连接,使得终端设备和机器人之间的连接方式灵活多样,保证了存储桌号信息的可适应性。
10、综上,本技术提出一种通过机器人接收终端发送的桌号信息,从而实现机器人自动存储餐桌信息的过程,进一步地,在存储餐桌信息过程时,主要依赖待送餐区域的每一个餐桌的桌号信息与机器人在每一个餐桌处的位姿信息之间的一一对应关系,根据餐桌的桌号信息和机器人的位姿信息,生成餐桌的餐桌信息,进一步将餐桌信息添加至待送餐区域的地图中。该方法能够使机器人智能化地实现餐桌的桌号信息存储过程,同时兼顾了餐桌的桌号信息与其机器人在每一个餐桌处的位姿信息之间的匹配关系,在保证了餐桌的桌号信息存储的正确性的同时,提高了存储的效率,避免了传统的手动输入桌号信息方法导致的失误,减轻了人力的消耗。进一步地,在待送餐区域的地图数据中,将每一个餐桌的餐桌信息添加至待送餐区域的地图数据之后,实时更新待送餐区域的地图数据。能够避免由于机器人出现故障或停止工作时,造成餐桌信息存储失败的问题,节省了存储的流程和工作量,极大的提高了机器人存储桌号信息的效率,并且在终端设备与机器人连接时,提供了多种可以选择的连接方式,包括有线连接和无线连接,使得终端设备和机器人之间的连接方式灵活多样,保证了存储桌号信息的可适应性。
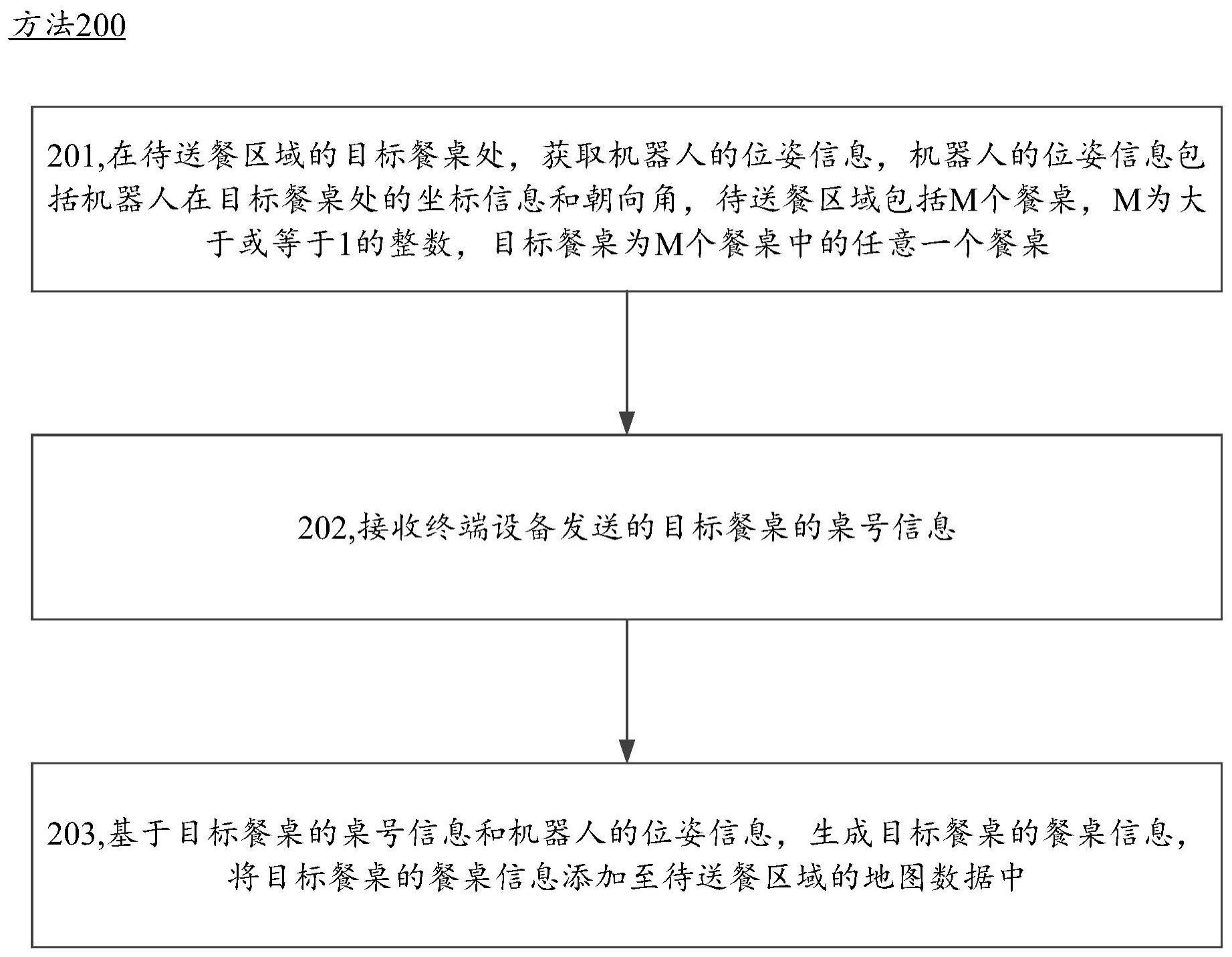
11、第二方面,提供了一种存储餐桌信息的方法,其特征在于,该方法包括:在待送餐区域的目标餐桌处,获取机器人的位姿信息,该机器人的位姿信息包括该机器人在该目标餐桌处的坐标信息和朝向角,该待送餐区域包括m个餐桌,m为大于或等于1的整数,该目标餐桌为该m个餐桌中的任意一个餐桌;接收终端设备发送的该目标餐桌的桌号信息;基于该目标餐桌的桌号信息和该机器人的位姿信息,生成该目标餐桌的餐桌信息,将该目标餐桌的餐桌信息添加至该待送餐区域的地图数据中。
12、上述技术方案,提出一种通过机器人接收终端发送的桌号信息,从而实现机器人自动存储餐桌信息的过程,进一步地,在存储餐桌信息的过程中,主要依赖待送餐区域的每一个餐桌的桌号信息与机器人在每一个餐桌处的位姿信息之间的一一对应关系,根据将餐桌的桌号信息和机器人的位姿信息,生成餐桌的餐桌信息,进一步将餐桌信息添加至待送餐区域的地图中。该方法能够使机器人智能化地实现餐桌的餐桌信息存储过程,同时兼顾了餐桌的桌号信息与机器人在每一个餐桌处的位姿信息之间的匹配关系,在保证了餐桌的餐桌信息存储的正确性的同时,提高了存储的效率,避免了传统的手动输入桌号信息方法导致的失误,减轻了人力的消耗。
13、结合第二方面,在某些可能的实现方式中,基于该目标餐桌的桌号信息和该机器人的位姿信息,生成该目标餐桌的餐桌信息,将该目标餐桌的餐桌信息添加至该待送餐区域的地图数据中之后,该方法还包括:根据该待送餐区域的地图数据中的该目标餐桌的餐桌信息,更新该待送餐区域的地图数据。
14、上述技术方案中,在待送餐区域的地图数据中,将每一个餐桌的餐桌信息添加至待送餐区域的地图数据之后,实时更新待送餐区域的地图数据。能够避免由于机器人出现故障或停止工作时,造成餐桌的餐桌信息存储失败的问题,节省了存储的流程和工作量,极大的提高了机器人存储桌号信息的效率。
15、结合第二方面和上述实现方式,在某些可能的实现方式中,该m个餐桌的每一餐桌对应有识别码,该识别码用于使该机器人接收该终端设备发送的该目标餐桌的桌号信息,该识别码包括二维码、条形码、点阵码中的任意一种或多种。
16、结合第二方面和上述实现方式,在某些可能的实现方式中,该每一餐桌对应唯一的识别码。
17、结合第二方面和上述实现方式,在某些可能的实现方式中,该终端设备与该机器人通过以下中的任意一种或多种方式连接:宽带连接、无线网络通信wi-fi连接、蓝牙连接、紫蜂zigbee连接、蜂窝数据连接。
18、上述技术方案中,在终端设备与机器人连接时,提供了多种可以选择的连接方式,包括有线连接和无线连接,使得终端设备和机器人之间的连接方式灵活多样,保证了存储餐桌信息的可适应性。
19、综上,本技术提出一种通过机器人接收终端发送的桌号信息,从而实现机器人自动存储餐桌信息的过程,进一步地,在存储餐桌信息过程时,主要依赖待送餐区域的每一个餐桌的桌号信息与机器人在每一个餐桌处的位姿信息之间的一一对应关系,根据将餐桌的桌号信息和机器人的位姿信息,生成餐桌的餐桌信息,进一步将餐桌信息添加至待送餐区域的地图中。该方法能够使机器人智能化地实现餐桌的桌号信息存储过程,同时兼顾了餐桌的桌号信息与机器人在每一个餐桌处的位姿信息之间的匹配关系,在保证了餐桌的桌号信息存储的正确性的同时,提高了存储的效率,避免了传统的手动输入桌号信息方法导致的失误,减轻了人力的消耗。进一步地,在待送餐区域的地图数据中,将每一个餐桌的餐桌信息添加至待送餐区域的地图数据之后,实时更新待送餐区域的地图数据。能够避免由于机器人出现故障或停止工作时,造成餐桌信息存储失败的问题,节省了存储的流程和工作量,极大的提高了机器人存储餐桌信息的效率,并且在终端设备与机器人连接时,提供了多种可以选择的连接方式,包括有线连接和无线连接,使得终端设备和机器人之间的连接方式灵活多样,保证了存储餐桌信息的可适应性。
20、第三方面,提供了一种存储餐桌信息的装置,该装置包括:获取模块,用于在待送餐区域的目标餐桌处,获取机器人的位姿信息,该机器人的位姿信息包括该机器人在该目标餐桌处的坐标信息和朝向角,该待送餐区域中包括m个餐桌,m为大于或等于1的整数,该目标餐桌为该m个餐桌中的任意一个餐桌;接收模块,用于接收终端设备发送的该目标餐桌的桌号信息;第一处理模块,用于基于该目标餐桌的桌号信息和该机器人的位姿信息,生成该目标餐桌的餐桌信息,将该目标餐桌的餐桌信息添加至该待送餐区域的地图数据中。
21、结合第三方面,在某些可能的实现方式中,基于该目标餐桌的桌号信息和该机器人的位姿信息,生成该目标餐桌的餐桌信息,将该目标餐桌的餐桌信息添加至该待送餐区域的地图数据中之后,该装置还包括:第二处理模块,用于根据该待送餐区域的地图数据中的该目标餐桌的餐桌信息,更新该待送餐区域的地图数据。
22、结合第三方面和上述实现方式,在某些可能的实现方式中,该m个餐桌的每一餐桌对应有识别码,该识别码用于使该机器人接收该终端设备发送的该目标餐桌的桌号信息,该识别码包括二维码、条形码、点阵码中的任意一种或多种。
23、结合第三方面和上述实现方式,在某些可能的实现方式中,该每一餐桌对应唯一的识别码。
24、结合第三方面和上述实现方式,在某些可能的实现方式中,该终端设备与该机器人通过以下中的任意一种或多种方式连接:宽带连接、无线网络通信wi-fi连接、蓝牙连接、紫蜂zigbee连接、蜂窝数据连接。
25、第四方面,提供一种设备,包括存储器和处理器。该存储器用于存储可执行程序代码,该处理器用于从存储器中调用并运行该可执行程序代码,使得该设备执行上述第一方面或第一方面的任一可能的机器人所实现的步骤。
26、第五方面,提供了一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面的任一可能的机器人所实现的步骤。
27、第六方面,提供了一种计算机可读介质,该计算机可读介质存储有计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面的任一可能的机器人所实现的步骤。
- 还没有人留言评论。精彩留言会获得点赞!