控制装置、摄像装置、镜头装置、控制方法和存储介质与流程
1.本发明涉及控制装置、摄像装置、镜头装置、控制方法和程序(或存储介质)。
背景技术:
2.在中心投影型光学系统中,在相机抖动时成像平面上的像点移动在图像的中心部分(图像中心)与图像的外围(图像外围)之间是不同的。如图18a所示,图像外围的像点移动量大于图像中心的像点移动量,因此,在图像稳定之后,与图像中心的像点相比,图像外围的像点保持更加显著地移动,如图18b所示。日本特开(“jp”)2018-173632号公报公开了一种摄像装置,其基于由中心投影方法引起的在图像中心处的图像模糊量与在预定像点位置处的图像模糊量之间的差,来提供图像周边的像点位置处的图像稳定。
3.在jp 2018-173632号公报中公开的摄像装置使用对中心投影方法的像差不加考虑的理想光学系统中的像高相关表达式,来计算用于预定像点位置处的图像稳定的校正量。因此,如果对于具有畸变残留的实际光学系统,基于通过上述表达式计算的校正量来进行图像稳定,则发生校正残留或过校正。此外,如图18b所示,在像点移动方向与图像中心处的像点移动方向具有倾斜关系的像点位置处,像点以与图像中心的矢量不同的矢量移动,因此仅通过上述表达式难以适当地计算该像点位置处的校正量。
4.jp 2018-173632还公开了一种通过将存储在存储器中的关于光学系统的畸变的设计值信息添加到计算的校正量来更适当地提供图像稳定的方法,但是该方法使计算处理复杂化。此外,还难以计算像点移动方向与图像中心处的像点移动方向具有倾斜关系的像点位置处的校正量。
技术实现要素:
5.本发明提供了控制装置、摄像装置、镜头装置、控制方法和存储介质,各自在包括光轴中心的预定像点位置处能够容易且令人满意地提供图像稳定。
6.根据本发明的一方面的控制装置包括被构造为执行多个任务的至少一个处理器或电路,所述多个任务包括:第一获取任务,其被构造为,获取与成像光学系统的像点位置相对应的、针对所述成像光学系统的倾斜的图像移位灵敏度的信息,所述信息包括所述成像光学系统的畸变的影响;以及第二获取任务,其被构造为,获取用于图像稳定器的图像稳定的图像稳定驱动量,所述图像稳定器被构造为提供图像稳定。所述第二获取任务使用与预定像点位置相对应的所述图像移位灵敏度的信息,获取与所述预定像点位置相对应的所述图像稳定驱动量。
7.各自包括上述控制装置的摄像装置和镜头装置也构成了本发明的另一方面。与上述控制装置相对应的控制方法和存储使计算机执行该控制方法的程序的存储介质也构成了本发明的另一方面。
8.通过以下参照附图对示例性实施例的描述,本发明的其他特征将变得清楚。
附图说明
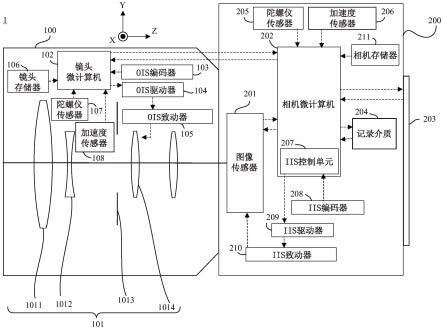
9.图1是根据第一实施例的摄像系统的示意性构造图。
10.图2是示出根据第一实施例的用于获取图像稳定驱动量的控制方法的流程图。
11.图3示出了当根据第一实施例的成像光学系统倾斜时,图像中心处的像点移动方向上的像高与倾斜图像移位灵敏度之间的关系。
12.图4说明了当在第一实施例中绕y轴发生旋转模糊时,相对于在图像中心处的像点移动的在预定像点位置处的像点移动。
13.图5a示出了成像平面上的像点位置,并且图5b示出了具有根据像点位置的校正系数信息的校正系数表。
14.图6示出了当在第一实施例中通过iis校正预定像点位置处的图像模糊时,在各像点处生成的校正残留的像点移动量的比率和方向。
15.图7示出了当根据第二实施例的成像光学系统倾斜时,与图像中心处的像点移动方向正交的方向上的像高与倾斜图像移位灵敏度之间的关系。
16.图8示出了当在第二实施例中通过iis校正图像中心处的图像模糊时,在各像点处生成的校正残留的像点移动量的比率和方向。
17.图9是聚焦于无限远的物体的对焦状态下,根据示例1的光学系统在广角端的截面图。
18.图10是聚焦于无限远的物体的对焦状态下,根据示例1的光学系统在广角端的像差图。
19.图11是聚焦于无限远的物体的对焦状态下,根据示例2的光学系统在广角端的截面图。
20.图12是聚焦于无限远的物体的对焦状态下,根据示例2的光学系统在广角端的像差图。
21.图13是聚焦于无限远的物体的对焦状态下,根据示例3的光学系统在广角端的截面图。
22.图14是聚焦于无限远的物体的对焦状态下,根据示例3的光学系统在广角端的像差图。
23.图15是聚焦于无限远的物体的对焦状态下,根据示例4的光学系统在广角端的截面图。
24.图16是聚焦于无限远的物体的对焦状态下,根据示例4的光学系统在广角端的像差图。
25.图17a至图17c示出了根据示例1的光学系统中从物平面入射的各视角的d线的主光线的光线追踪。
26.图18a示出了当由于旋转模糊而在图像中心处在x轴方向上发生图像模糊时,被摄体图像上的各像点处的像点移动量的比率和方向,并且图18b通过箭头示出了当通过传感器移位型图像稳定机构校正图18a所示的图像中心处的图像模糊时,在各像点处生成的校正残留的像点移动量的比率和方向。
具体实施方式
27.现在将参照附图详细描述根据本发明的实施例。各图中的对应元件将由相同的附图标记指定,并将省略其重复描述。
28.在以下描述中,在三维正交坐标系(x轴方向、y轴方向和z轴方向)中,x轴方向是成像平面的长边方向,y轴方向是成像平面的短边方向,并且z轴方向是光学系统的光轴方向。
29.第一实施例
30.图1是根据本实施例的摄像系统1的示意性构造图。摄像系统1包括镜头装置100和摄像装置200。镜头装置100包括成像光学系统101、镜头微计算机102、镜头移位型图像稳定(以下称为ois)编码器103、ois驱动器104、ois致动器105和镜头存储器(存储单元)106。摄像装置200包括图像传感器(摄像元件)201、相机微计算机202、显示/操作单元203和记录介质204。摄像装置200还包括陀螺仪传感器205、加速度传感器206、图像传感器移位型图像稳定(以下称为iis)编码器208、iis驱动器209、iis致动器210和相机存储器(存储部)211。iis是由移动图像传感器201进行的图像稳定(is)。镜头微计算机102和相机微计算机202可以被构造为分别与镜头装置100和摄像装置200分离的控制装置。
31.成像光学系统101包括聚焦光学系统1011、变倍(变焦)光学系统1012、光圈(孔径光阑)1013和ois光学系统1014。成像光学系统101使用来自设置的视角内的对焦位置处的被摄体的光,在图像传感器201的成像平面上形成被摄体图像。聚焦光学系统1011提供聚焦。变倍光学系统1012提供变倍(变焦)以改变成像视角。光圈1013调整从被摄体摄取的光量。ois光学系统1014通过使其自身从成像光学系统101的光轴离心而对在静止或运动图像拍摄期间发生的图像模糊提供图像稳定。这里,ois是通过移动ois光学系统1014来进行的图像稳定。
32.镜头微计算机102控制ois光学系统1014。更具体地,镜头微计算机102使用来自相机微计算机202的图像稳定(is)驱动量以及来自对ois光学系统1014的位置进行检测的ois编码器103的位置信号,来确定ois致动器105的ois驱动量。ois驱动量被确定为不超过ois致动器105的可移动范围。当ois致动器105从ois驱动器104接收到ois驱动量信号时,ois致动器105使ois光学系统1014在包括与z轴方向正交的方向的分量的方向上移动,以使其从成像光学系统101的光轴离心,从而提供图像稳定。也就是说,ois致动器105用作提供图像稳定的图像稳定器之一。
33.镜头存储器106存储成像光学系统101的光学设计信息。光学设计信息包括成像光学系统101对于各像高的倾斜图像移位灵敏度的信息(根据成像光学系统101的像点位置的对成像光学系统101的倾斜的图像移位灵敏度的信息)。倾斜图像移位灵敏度的信息是通过使用成像光学系统101的设计值而获得的信息,并且包括成像光学系统101的畸变的影响。当摄像系统1生成旋转模糊使得与光轴正交的x-y平面相对于光轴倾斜时,使用倾斜图像移位灵敏度的信息可以在成像光学系统101的预定像点位置处提供令人满意的图像稳定。相机存储器211可以存储成像光学系统101的光学设计信息,该光学设计信息包括倾斜图像移位灵敏度的信息。镜头存储器106和相机存储器211都可以存储成像光学系统101的光学设计信息,该光学设计信息包括倾斜图像移位灵敏度的信息。
34.成像光学系统101具有由以下表达式表示的畸变dist(h):
35.dist(h)=(h-h0)/h0
36.h0=ftanω
37.其中,f是成像光学系统101的焦距,ω是半视角,h是从成像光学系统101的光轴到从物平面入射的具有半视角ω的主光线被成像的像平面上的位置的距离(真实像高),并且h0是中心投影方法的理想像高。
38.具有畸变意味着在成像范围内的任意像高处的畸变量都不为零。具有畸变的成像光学系统包括具有变倍功能和聚焦功能并且在特定变倍状态或对焦状态下具有畸变的成像光学系统。
39.图像传感器201包括ccd(电荷耦合器件)图像传感器、cmos(互补金属氧化物半导体)图像传感器或其他图像传感器。图像传感器201将成像光学系统101在图像传感器201的成像平面上形成的被摄体图像转换为电信号,并将该电信号作为图像信号输出。作为模拟信号的图像信号通过未示出的a/d转换器被转换为数字信号,然后被输出。
40.相机微计算机202控制整个摄像系统1。例如,相机微计算机202从图像传感器201读出作为图像数据的图像信号。相机微计算机202基于光学设计信息对图像数据进行诸如图像处理的处理,将图像数据显示在显示/操作单元203上,并将图像数据保存在记录介质204中。相机微计算机202向镜头微计算机102发出诸如成像光学系统101的聚焦、变焦倍率改变和光圈调整的指令。与处理有关的一些设置可以通过操作单元(诸如显示/操作单元203和未示出的按钮)来改变。
41.相机微计算机202根据图2的流程获取is驱动量(用于图像稳定器的图像稳定的图像稳定驱动量)。图2是示出相机微计算机202获取is驱动量的控制方法的流程图。在第一获取步骤s1中,相机微计算机202用作第一获取任务,并获取根据成像光学系统101的像点位置的对成像光学系统101的倾斜的图像移位灵敏度的信息,该信息包括成像光学系统101的畸变的影响。在第二获取步骤s2中,相机微计算机202用作第二获取任务,并使用根据预定像点位置的图像移位灵敏度的信息来获取根据预定像点位置的is驱动量。相机微计算机202可以计算is驱动量,或者可以从在服务器、存储器等中存储的表获取is驱动量。在本实施例中,相机微计算机202用作第一获取任务和第二获取任务,但是镜头微计算机102也可以用作第一获取任务和第二获取任务。
42.陀螺仪传感器205输出摄像系统1的角速度的信息作为运动检测信号。加速度传感器206输出摄像系统1在平移方向上的移动量的信息作为运动检测信号。相机微计算机202在接收到从各传感器发送的运动检测信号时,将is驱动量发送到镜头微计算机102或相机微计算机202中的iis控制单元207,以针对摄像系统1的运动,对被摄体图像提供图像稳定。在图像稳定中,可以进行ois或iis,也可以利用图像稳定的确定份额(诸如50%的ois和50%的iis)进行ois和iis二者。
43.iis控制单元207控制图像传感器201。更具体地,iis控制单元207使用来自相机微计算机202的is驱动量以及来自对图像传感器201的位置进行检测的iis编码器208的位置信号,来确定iis致动器210的iis驱动量。确定iis驱动量以不超过iis致动器210的可移动范围。当iis致动器210从iis驱动器209接收到iis驱动量信号时,iis致动器210使图像传感器201在包括与z轴方向垂直的方向的分量的方向上移动以使其从成像光学系统101的光轴离心,并且提供图像稳定。也就是说,iis致动器210用作提供图像稳定的图像稳定器之一。
44.镜头装置100可以包括陀螺仪传感器107和加速度传感器108。在这种情况下,在
ois中,镜头微计算机102使用利用从这些传感器输出的运动检测信号而获取的is驱动量以及来自ois编码器103的位置信号,来确定ois驱动量。
45.现在将描述在预定像点位置处的图像稳定期间的处理。当陀螺仪传感器205或加速度传感器206检测到摄像系统1的运动时,各传感器将运动检测信号(关于模糊的信息)输出到相机微计算机202。相机微计算机202使用由镜头存储器106存储的倾斜图像移位灵敏度的信息、成像平面上的is位置信息以及运动检测信号,获取is驱动量。相机微计算机202将获取的is驱动量发送到镜头微计算机102或iis控制单元207。获取倾斜图像移位灵敏度的信息
46.在本实施例中,倾斜图像移位灵敏度是当成像光学系统101倾斜到与成像平面上的、成像光学系统的光轴正交的预定旋转轴时,在与该旋转轴正交的方向上的像点移动量。图3示出了当根据本实施例的成像光学系统101倾斜时,图像中心处的像点移动方向上的像高与倾斜图像移位灵敏度(像点移动量)之间的关系。如图3所示,当被设计为通过中心投影方法来光学校正像差的成像光学系统101倾斜时,像点移动量随着像高的增加而增加。因为本实施例利用通过使用成像光学系统101的设计值而获取的倾斜图像移位灵敏度,所以本实施例可以获取在发生旋转模糊时的各像高的像点移动量,而无需使用畸变量和基于投影方法的像高表达式进行计算处理。根据本实施例的倾斜图像移位灵敏度是通过将当成像光学系统101相对于预定旋转轴倾斜0.5
°
时的像点移动量除以0.5
°
而获得的值。成像光学系统101的倾斜角不限于0.5
°
,而可以适当地设置。
47.图4说明了当绕y轴发生旋转模糊时,相对于在图像中心处的像点移动的在预定像点位置处的像点移动,并且示意性地示出了静止(非模糊)被摄体图像301变成了由于图像模糊而畸变为梯形的被摄体图像302的状态。在通过中心投影方法光学校正畸变的广角镜头中,当发生旋转模糊时,像被摄体图像302这样的梯形畸变劣化。当成像平面上的各像点根据由箭头指示的像点移动矢量来移动时,发生图像模糊。
48.现在将描述在成像平面上的中心位置o处的+x轴方向上的像点移动量t
x0
以及预定像点位置a处的像点移动量t
x
,该中心位置o是当发生绕y轴的旋转模糊量ωy时的图像中心。
49.像点移动量t
x0
由以下表达式(1)表示:
50.t
x0
=ωy·
ls
ꢀꢀꢀ
(1)
51.其中,ls是像高为0处的倾斜图像移位灵敏度。
52.假设成像平面(x-y平面)在以中心位置o为原点的极坐标系(r-θ坐标系)中,并且(r,θ)为预定像点位置a的坐标。即,在本实施例中,预定像点位置a为由多个参数表示的在成像平面上的位置。图3中的横轴上的像高是图4所示的极坐标系中的r方向上的像高hr。相对于倾斜图像移位灵敏度ls的在像高hr处的倾斜图像移位灵敏度系数k
ls_r
(hr)由以下表达式(2)表示:
53.k
ls_r
(hr)=lsr(hr)/ls
ꢀꢀꢀꢀ
(2)
54.其中,lsr(hr)是像高hr处的倾斜图像移位灵敏度。
55.像点移动量t
x0
使用与直线oa平行的平行分量t
rx0
和与直线oa垂直的垂直分量t
θx0
由以下表达式(3)至(5)表示:
56.t
rx0
=t
x0
·
cosθ=ωy·
ls
·
cosθ
ꢀꢀꢀꢀꢀ
(3)
57.t
θx0
=t
x0
·
(-sinθ)=-ωy·
ls
·
sinθ(4)
58.|t
x0
|=(t
rx02
+t
θx02
)
1/2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
59.平行分量t
rx0
在从中心位置o分离的方向(r方向)上为正,并且垂直分量t
θx0
在朝向绕中心位置o的逆时针方向的与r方向正交的方向(θ方向)上为正。r方向和θ方向也分别称为子午方向和矢状方向。
60.接下来,考虑预定像点位置a处的像点移动量t
x
。平行于直线oa的平行分量t
rx
受像高r处的倾斜图像移位灵敏度lsr(r)影响,并且垂直于直线oa的垂直分量t
θx
受像高为0处的倾斜图像移位灵敏度ls影响。根据以上,像点移动量t
x
使用平行分量t
rx
和垂直分量t
θx
由以下表达式(6)至(8)表示:
61.t
rx
=k
ls_r
(r)
·
t
rx0
=k
ls_r
(r)
·
ωy·
ls
·
cosθ
ꢀꢀꢀꢀ
(6)
62.t
θx
=k
ls_r
(0)
·
t
θx0
=-ωy·
ls
·
sinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
63.|t
x
|=(t
rx2
+t
θx2
)
1/2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
64.以此方式,可以计算当绕y轴发生旋转模糊量ωy时预定像点位置a处的像点移动量t
x
。类似地,使用与直线oa平行的平行分量t
ry
和与直线oa垂直的垂直分量t
θy
,由以下表达式(9)至(11)表示当绕x轴发生旋转模糊量ω
x
时的极坐标系中的预定像点位置a处的像点移动量ty:
65.t
ry
=k
ls_r
(r)
·
t
ry0
=k
ls_r
(r)
·
ω
x
·
ls
·
sinθ
ꢀꢀꢀꢀꢀ
(9)
66.t
θy
=k
ls_r
(0)
·
t
θy0
=ω
x
·
ls
·
cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
67.|ty|=(t
ry2
+t
θy2
)
1/2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
68.如上所述,可以使用与直线oa平行的平行分量tr和与直线oa垂直的垂直分量t
θ
,由以下表达式(12)至(14)来表示当绕与成像平面上的光轴正交的预定旋转轴发生旋转模糊量(ω
x
,ωy)时的预定像点位置a处的像点移动量t。
69.tr=t
rx
+t
ry
=k
ls_r
(r)
·
ls(ωy·
cosθ+ω
x
·
sinθ)=k1(r,θ)
·
ωy+k2(r,θ)
·
ω
x
ꢀꢀ
(12)
70.t
θ
=t
θx
+t
θy
=ls(-ωy·
sinθ+ω
x
·
cosθ)=k3(r,θ)
·
ωy+k4(r,θ)
·
ω
x
ꢀꢀ
(13)
71.|t|=(t
r2
+t
θ2
)
1/2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
72.表达式(12)和(13)中的系数(k1,k2,k3,k4)如下给出:
73.k1(r,θ)=k
ls_r
(r)
·
ls
·
cosθ
74.k2(r,θ)=k
ls_r
(r)
·
ls
·
sinθ
75.k3(r,θ)=-ls
·
sinθ
76.k4(r,θ)=ls
·
cosθ
77.如表达式(12)至(14)所示,像点移动量t包括校正系数信息(k1,k2,k3,k4)和旋转模糊量(ω
x
,ωy),校正系数信息(k1,k2,k3,k4)包括倾斜图像移位灵敏度和像点位置处的位置信息(r,θ)。在本实施例中,镜头存储器106预先存储由图5a和图5b所示的像点位置定义的矩阵格式的校正系数信息(k1,k2,k3,k4)的校正系数表,作为倾斜图像移位灵敏度的信息。该构造可以容易地获得当发生旋转模糊量(ω
x
,ωy)时的预定像点位置a处的像点移动量t。适当地设置校正系数表中的相邻像点位置之间的间隔。校正系数表可以不在极坐标系中管理,而在正交坐标系中管理。
78.倾斜图像移位灵敏度的信息可以包括各像高的倾斜图像移位灵敏度以减少存储在镜头存储器106中的信息,或者可以使用作为图像稳定对象的预定像点位置的位置信息来提供像点移动量t。像点位置的位置信息可以是极坐标系的信息或预定坐标系(诸如正交
坐标系)的信息。
79.成像平面上的图像稳定位置信息的设置
80.本实施例可以将摄像系统1的设置模式切换为图像中心is模式或is点设置模式,图像中心is模式中将作为图像稳定对象的预定像点位置(图像稳定位置)设置为成像平面的中心,is点设置模式中可以将图像稳定点设置为预定像点位置。在设置了is点设置模式的情况下,可以在显示/操作单元203上设置图像稳定位置。显示/操作单元203可设置的位置可以与进行自动聚焦的像点位置或进行自动测光(测光)的像点位置相关联。进行自动聚焦的像点位置可以是通过瞳孔检测、人物检测等自动检测的位置。成像平面上的is位置信息(r,θ)被发送到相机微计算机202,并且从校正系数表中选择要使用的校正系数信息。
81.运动检测信号
82.陀螺仪传感器205检测关于摄像系统1的多个旋转轴的角速度并且输出旋转模糊量的信息作为运动检测信号。在本实施例中,陀螺仪传感器205检测绕x轴和y轴的角速度,并输出旋转模糊量(ω
x
,ωy)的信息。加速度传感器206检测摄像系统1的多个轴向上的加速度,并且输出平移模糊量的信息作为运动检测信号。在本实施例中,加速度传感器206检测x轴方向和y轴方向的加速度,并输出平移模糊量(a
x
,ay)的信息。陀螺仪传感器205可以包括多个传感器,各传感器检测绕单个轴的角速度。类似地,加速度传感器206可以包括多个传感器,各传感器检测单个方向上的加速度。
83.获取图像稳定驱动量
84.相机微计算机202使用倾斜图像移位灵敏度的信息、is位置信息和运动检测信号来获取is驱动量。例如,在通过iis校正由于旋转模糊而导致的预定像点位置a处的图像模糊的情况下,可以移动图像传感器201以消除像点移动量t。iis致动器210在x轴方向上的is驱动量x和在y轴方向上的is驱动量y由以下表达式(15)和(16)表示:
85.x=tr·
cosθ-t
θ
·
sinθ=ωy{sin2θ+k
ls_r
(r)
·
cos2θ}ls+ω
x
{k
ls_r
(r)-1}ls
·
sinθ
·
cosθ
86.=k'1(r,θ)
·
ωy+k'2(r,θ)
·
ω
x
ꢀꢀꢀ
(15)
87.y=tr·
sinθ+t
θ
·
cosθ=ωy{k
ls_r
(r)-1}ls
·
sinθ
•
cosθ+ω
x
{k
ls_r
(r)
•
sin2θ+cos2θ}ls
88.=k'3(r,θ)
·
ωy+k'4(r,θ)
·
ω
x
ꢀꢀꢀ
(16)
89.表达式(15)和(16)中的系数(k'1,k'2,k'3,k'4)如下给出:
90.k'1(r,θ)={sin2θ+k
ls_r
(r)
•
cos2θ}ls
91.k'2(r,θ)={k
ls_r
(r)-1}ls
·
sinθ
·
cosθ
92.k'3(r,θ)={k
ls_r
(r)-1}ls
·
sinθ
·
cosθ
93.k'4(r,θ)={k
ls_r
(r)
•
sin2θ+cos2θ}ls
94.图6示出了当在第一实施例中通过iis校正预定像点位置a处的图像模糊时,在各像点处生成的校正残留的像点移动量的比率和方向。如图6所示,在允许图像中心处的图像模糊的情况下,令人满意地校正了设置的预定像点位置a处的图像模糊。由于在关于作为原点的图像中心与像点位置a成点对称的像点位置a'处发生与像点位置a处的运动矢量相同的运动矢量的像点移动,因此像点位置a'处的图像模糊也被校正。因此,通过将图像稳定位置适当地设置为光轴外的预定位置使得图像中心处的图像模糊不会引起违和感,可以将整
个图像中的图像模糊量的分布维持在较低水平,并且可以减少整个图像的图像模糊。
95.如表达式(15)和(16)所示,is驱动量(x,y)包括校正系数信息(k'1,k'2,k'3,k'4)和旋转模糊量(ω
x
,ωy)。因此,可以将矩阵格式的校正系数信息(k'1,k'2,k'3,k'4)的校正系数表作为倾斜图像移位灵敏度的信息存储在镜头存储器106中。通过使用k'1等代替上述校正系数信息(k1,k2,k3,k4),可以容易地获得当发生旋转模糊量(ω
x
,ωy)时的预定像点位置a处的is驱动量(x)。
96.在ois的情况下,ois光学系统1014的各像高的ois偏心(离心)灵敏度ts(h)随着像高变高而增加,使得可以基于ois偏心灵敏度ts(h)获取is驱动量。因此,可以高精度地进行图像稳定。
97.关于源自平移模糊的图像模糊,可以使用来自加速度传感器206的平移模糊量的信息来获取is驱动量。可以通过使用对焦物距信息将平移模糊量(a
x
,ay)转换为旋转模糊量(ω
x
,ωy),来获取平移模糊的is驱动量。在旋转模糊和平移模糊同时发生的情况下,可以通过将平移模糊的is驱动量和旋转模糊的is驱动量相加,来获取is驱动量。可以通过将转换后的旋转模糊量与在倾斜图像移位灵敏度的信息中所包括的校正系数相乘,来获取预定像点位置处的平移模糊的is驱动量。
98.在对焦位置靠近近距离端的情况下,由旋转模糊生成的物平面的平移分量变大。可以通过上述方法获取由根据物距的平移分量引起的图像模糊的is驱动量。
99.倾斜图像移位灵敏度根据成像光学系统101聚焦的物距和焦距(成像视角)而改变。在本实施例中,镜头存储器106存储根据由聚焦光学系统1011确定的对焦位置和由变倍光学系统1012确定的焦距而不同的多个校正系数表。由此,即使在变倍(变焦)或聚焦期间,也可以在预定像点位置处令人满意地提供图像稳定。
100.镜头装置100可以可拆卸地附接到摄像装置200。在这种情况下,适当的倾斜图像移位灵敏度的信息可以用于各镜头装置100。因此,即使在不同的镜头装置100附接到摄像装置200并被使用的情况下,也能够令人满意地校正预定像点位置处的图像模糊。
101.第二实施例
102.与第一实施例相比,本实施例更宽地扩展了倾斜图像移位灵敏度的信息。由于本实施例中的摄像系统1的构造和图像稳定中的处理与第一实施例中的相同,因此将省略对其的详细描述。
103.在本实施例中,成像光学系统101的被摄体像变形为桶状的畸变量比第一实施例中的大。在畸变量小的成像光学系统中,当成像光学系统倾斜时与图像中心处的像点移动方向正交的方向上的任意像点位置处的像点移动量几乎类似于图像中心处的像点移动量。另一方面,根据本实施例的成像光学系统101具有较大的畸变量。这样,当成像光学系统101倾斜时与图像中心处的像点移动方向正交的方向上的像点移动量随着位置远离图像中心而变小。因此,在本实施例中,镜头存储器106存储,针对由旋转模糊引起的、与图像中心处的像点移动方向正交的方向上的像点移动量,的显著倾斜图像移位灵敏度的信息。
104.图7示出了当根据本实施例的成像光学系统101倾斜时,与图像中心处的像点移动方向正交的方向上的像高与倾斜图像移位灵敏度(像点移动量)之间的关系。图8示出了当通过iis校正根据第二实施例的图像中心处的图像模糊时,在各像点处生成的校正残留的像点移动量的比率和方向。在图7所示的横轴上的与成像平面上的中心位置o处的像点移动
方向正交的方向上的像高是与极坐标系中的r方向正交的方向上的像高。如图7所示,在本实施例中,当畸变量大的成像光学系统101倾斜时,与图像中心处的像点移动方向正交的方向上的像高h
θ
处的倾斜图像移位灵敏度ls
θ
(h
θ
)小于图像中心处的倾斜图像移位灵敏度ls。因此,如果在利用图像中心处的倾斜图像移位灵敏度ls获取is驱动量的情况下,在像高较高的像点位置处提供图像稳定,则如图8所示发生过校正。
105.因此,本实施例将倾斜图像移位灵敏度添加到第一实施例中描述的信息,并且创建包括在与成像光学系统101倾斜时的旋转轴平行的方向上的各像高的像点移动量的影响的信息。相对于图像中心处的倾斜图像移位灵敏度ls的、像高h
θ
处的倾斜图像移位灵敏度系数k
ls_θ
(h
θ
)由以下表达式(17)表示:
106.k
ls_θ
(h
θ
)=ls
θ
(h
θ
)/ls
ꢀꢀꢀ
(17)
107.当发生旋转模糊量(ω
x
,ωy)时,作为预定像点位置a处的像点移动量t的极坐标系分量的平行于直线oa的平行分量tr以及垂直于直线oa的垂直分量t
θ
分别由以下表达式(12a)和(13a)表示:
108.tr=t
rx
+t
ry
=k
ls_r
(r)
·kls_θ
(0)
·
ls(ωy·
cosθ+ω
x
•
sinθ)=k1(r,θ)
·
ωy+k2(r,θ)
·
ω
x
ꢀꢀꢀ
(12a)
109.t
θ
=t
θx
+t
θy
=k
ls_r
(0)
·kls_θ
(r)
·
ls(-ωysinθ+ω
x
cosθ)=k3(r,θ)
·
ωy+k4(r,θ)
·
ω
x
ꢀꢀꢀ
(13a)
110.表达式(12a)和(13a)中的系数(k1,k2,k3,k4)如下给出:
111.k1(r,θ)=k
ls_r
(r)
·kls_θ
(0)
•
ls
·
cosθ
112.k2(r,θ)=k
ls_r
(r)
·kls_θ
(0)
·
ls
·
sinθ
113.k3(r,θ)=-k
ls_r
(0)
·kls_θ
(r)
·
ls
·
sinθ
114.k4(r,θ)=k
ls_r
(0)
·kls_θ
(r)
·
ls
·
cosθ
115.iis致动器210的x轴方向上的is驱动量x和y轴方向上的is驱动量y由以下表达式(15a)和(16a)表示:
116.x=tr·
cosθ-t
θ
·
sinθ
117.=ωy{k
ls_θ
(r)
·
sin2θ+k
ls_r
(r)
·
cos2θ}ls+ω
x
{k
ls_r
(r)-k
ls_θ
(r)}ls
·
sinθ
·
cosθ
118.=k'1(r,θ)
·
ωy+k'2(r,θ)
·
ω
x
ꢀꢀꢀ
(15a)
119.y=tr·
sinθ+t
θ
·
cosθ
120.=ωy{k
ls_r
(r)-k
ls_θ
(r)}ls
·
sinθ
·
cosθ+ω
x
{k
ls_r
(r)
•
sin2θ+k
ls_θ
(r)
•
cos2θ}ls
121.=k'3(r,θ)
•
ωy+k'4(r,θ)
·
ω
x
ꢀꢀꢀ
(16a)
122.表达式(15a)和(16a)中的系数(k'1,k'2,k'3,k'4)如下给出:
123.k'1(r,θ)={k
ls_θ
(r)
·
sin2θ+k
ls_r
(r)
·
cos2θ}ls
124.k'2(r,θ)={k
ls_r
(r)-k
ls_θ
(r)}ls
•
sinθ
·
cosθ
125.k'3(r,θ)={k
ls_r
(r)-k
ls_θ
(r)}ls
·
sinθ
·
cosθ
126.k'4(r,θ)={k
ls_r
(r)
·
sin2θ+k
ls_θ
(r)cos2θ}ls
127.如上所述,本实施例基于平行于旋转轴的方向和垂直于旋转轴的方向上的各像高的倾斜图像移位灵敏度来获取is驱动量。由此,即使在摄像系统1使用畸变量大的成像光学系统101时,也能够在预定像点位置处令人满意地提供图像稳定。
128.通过鱼眼镜头投影方法(诸如等距投影方法和等立体角投影方法)设计的光学系统相对于θ方向上的像点移动量也具有显著倾斜图像移位灵敏度特性。因此,可以基于在r方向和θ方向上的各像高的倾斜图像移位灵敏度来获取is驱动量。
129.在保证大的图像稳定角度作为图像稳定机构的规范的情况下,可以基于根据本实施例的倾斜图像移位灵敏度来确定is驱动量。
130.示例
131.现在参照附图描述根据本发明的成像光学系统101的示例。
132.图9、图11和图13分别是聚焦于无限远的物体的对焦状态下,根据示例1至3的光学系统l0在广角端的截面图。各截面图中所示的箭头表示在从广角端到远摄端的变焦期间各透镜单元的移动轨迹。图15是聚焦于无限远的物体的对焦状态下,根据示例4的光学系统l0的截面图。图15中所示的箭头表示在从无限远到近距离端(或近端)的聚焦期间透镜单元的移动轨迹。根据各示例的光学系统l0用于诸如数字摄像机、数字静态相机、广播相机、监视相机和智能电话相机的摄像装置。
133.在各截面图中,左侧是物侧,且右侧是像侧。根据各示例的光学系统l0包括多个透镜单元。如本文中使用,透镜单元是在变焦、聚焦或图像稳定期间整体移动或静止不动的一组透镜。也就是说,在根据各示例的光学系统l0中,相邻透镜单元之间的距离在变焦或聚焦期间改变。透镜单元可以包括一个或更多个透镜。透镜单元可以包括光圈(孔径光阑)。
134.sp表示光圈。ip表示像平面,像平面上设置有诸如ccd传感器或cmos传感器的图像传感器(光电转换元件)的成像平面。ois光学系统在ois期间偏心于光学系统l0的光轴。
135.根据示例1、2和4的光学系统l0的投影方法是中心投影方法(y=ftanθ)。根据示例3的光学系统l0的投影方法是等立体角投影方法(y=2
·f·
sin(θ/2))。
136.图10、图12和图14分别是聚焦于无限远的物体的对焦状态下,根据示例1至3的光学系统l0在广角端的像差图。图16是聚焦于无限远的物体的对焦状态下,根据示例4的光学系统l0的像差图。
137.在球面像差图中,fno表示f数并且指示d线(波长587.6nm)和g线(波长435.8nm)的球面像差量。在像散图中,s表示矢状像平面中的像散量,且m表示子午像平面中的像散量。畸变图示出了d线的畸变量。色差图示出了g线的横向色差。ω表示成像半视角(
°
)。
138.下面将示出分别对应于示例1至4的数值示例1至4。
139.在各数值示例的表面数据中,r表示各光学表面的曲率半径,且d(mm)表示第m表面与第(m+1)表面之间的轴上距离(光轴上的距离),其中m是从光入射表面开始计数的表面编号。nd表示各光学构件针对d线的折射率,且νd表示光学构件的阿贝数。特定材料的阿贝数νd表示如下:
140.νd=(nd-1)/(nf-nc)
141.其中nd、nf和nc是夫琅和费(fraunhofer)线中的d线(波长587.6nm)、f线(波长486.1nm)和c线(波长656.3nm)的折射率。
142.在各数值示例中,d、焦距(mm)、f数和半视角(
°
)的所有值都是当根据各示例的光学系统l0聚焦在无限远处的物体(无限远物体)上时的值。后焦距(bf)是就空气转换长度而言的从透镜的最后表面(最靠近像平面的透镜表面)到近轴像平面的在光轴上的距离。总光学长度是通过将后焦距与从透镜的最前表面(最靠近物体的透镜表面)到透镜的最后表面
的在光轴上的距离相加而获得的长度。
143.在光学表面是非球面的情况下,星号*被添加到表面编号的右侧。非球面形状表示如下:
144.x=(h2/r)/[1+{1-(1+k)(h/r)2}
1/2
]+a4
×
h4+a6
×
h6+a8
×
h8+a10
×h10
+a12
×h12
[0145]
其中,x是在光轴方向上从表面顶点起的位移量,h是在垂直于光轴的方向上从光轴起的高度,r是近轴曲率半径,k是圆锥常数,a4、a6、a8、a10和a12是各阶的非球面系数。各非球面系数中的“e
±
xx”表示
“×
10
±
xx”。
[0146]
在各数值示例中示出了倾斜图像移位灵敏度数据和ois光学系统的偏心度的偏心灵敏度数据。将参照图17a至图17c描述这些数据的获取方法。
[0147]
图17a至图17c是根据示例1的光学系统l0中与从物平面入射的各视角相对应的d线的主光线(半视角为0的主光线和半视角为ω的主光线)的光线追踪图。图17a至图17c示出了以像平面ip与光轴之间的交点为中心绕x轴的倾斜角ω
x
的倾斜状态以及在y轴方向上ois光学系统偏心了偏心量y的偏心状态下的静止光学系统l0。
[0148]
可以通过将像点移动量δy
lsr
(hr)除以倾斜角ω
x
来获取倾斜方向(r方向)上的各像高的倾斜图像移位灵敏度,δy
lsr
(hr)是图17a与图17b之间的与各半视角相对应的像平面ip上的成像位置的差。通过使用x轴方向上的各像高h
θ
的像点移动量δy
lsθ
来获取与倾斜方向正交的方向上的各像高的倾斜图像移位灵敏度。根据在光学系统l0倾斜0.5
°
的情况下的像点移动量来获取根据各示例的倾斜图像移位灵敏度。在图17b中,倾斜角ω
x
在逆时针方向为正,而在顺时针方向为负。像点移动量δy在向上方向为正,而在向下方向为负。
[0149]
通过将像点移动量δy
tsr
(hr)除以ois光学系统的偏心度y来获取偏心方向(r方向)上的各像高的ois光学系统的偏心灵敏度,δy
tsr
(hr)是图17a与图17c之间的与各半视角相对应的像平面ip上的成像位置的差。在各示例中,通过使用x轴方向上的各像高h
θ
的像点移动量δy
tsθ
来获取在与偏心方向正交的方向上的各像高的ois光学系统的偏心灵敏度。根据在ois光学系统偏心0.1mm的情况下的像点移动量,来获取各示例中的ois光学系统的偏心度的偏心灵敏度数据。
[0150]
[数值示例1]
[0151]
单位:mm
[0152]
表面数据
[0153]
[0154][0155]
非球面数据
[0156]
第12表面
[0157]
k=0.00000e+000 a4=-5.69442e-006 a6=-2.29053e-009
[0158]
a8=-4.72363e-011 a10=4.65343e-013 a12=-1.99227e-015
[0159]
第22表面
[0160]
k=0.00000e+000a4=1.87606e-006a6=1.45872e-009
[0161]
a8=2.78338e-011a10=-2.10980e-013a12=3.98590e-016
[0162]
第30表面
[0163]
k=0.00000e+000a4=-2.01869e-005a6=6.17344e-008
[0164]
a8=-2.64177e-010a10=-2.98832e-013a12=2.64092e-015
[0165]
第31表面
[0166]
k=0.00000e+000a4=1.63774e-006a6=9.32838e-008
[0167]
a8=-2.34772e-010a10=-7.39973e-013a12=4.51086e-015
[0168]
第34表面
[0169]
k=0.00000e+000a4=-2.51719e-005a6=1.25180e-007
[0170]
a8=-5.32709e-010a10=5.08044e-013a12=7.30860e-016
[0171]
第35表面
[0172]
k=0.00000e+000a4=-2.60571e-005a6=1.26402e-007
[0173]
a8=-6.23562e-010a10=1.45147e-012a12=-1.39940e-015
[0174]
各种数据
[0175][0176][0177]
在倾斜方向上在广角端处各像高的倾斜图像移位灵敏度数据
[0178][0179]
在与倾斜方向正交的方向上在广角端处各像高的倾斜图像移位灵敏度数据
[0180][0181]
相对于广角端的ois光学系统的偏心度的偏心方向上的各像高的偏心灵敏度数据
[0182][0183]
相对于广角端的ois光学系统的偏心度的与偏心方向正交的方向上的各像高的偏心灵敏度数据
[0184][0185]
[数值示例2]
[0186]
单位:mm
[0187]
表面数据
[0188]
[0189][0190]
非球面数据
[0191]
第1表面
[0192]
k=0.00000e+000a4=8.30213e-006a6=-1.33976e-008
[0193]
a8=4.25008e-011a10=-8.60253e-014a12=1.03363e-016
[0194]
第2表面
[0195]
k=-9.81344e-001a4=4.49709e-007a6=-2.34544e-008
[0196]
a8=-1.05516e-010a10=8.07443e-013a12=-2.78552e-015
[0197]
第3表面
[0198]
k=0.00000e+0004=-9.01759e-006a6=-1.39642e-007
[0199]
a8=1.23272e-009a10=-3.49283e-012a12=3.62808e-015
[0200]
第4表面
[0201]
k=0.00000e+000a4=6.34981e-006a6=-1.29871e-007
[0202]
a8=1.67920e-009a10=-6.48374e-012a12=1.50043e-014
[0203]
第27表面
[0204]
k=0.00000e+000a4=-8.04129e-005a6=2.64851e-007
[0205]
a8=-1.06038e-009a10=4.87911e-012a12=-8.56493e-015
[0206]
第28表面
[0207]
k=0.00000e+000a4=-6.00659e-005a6=2.67376e-007
[0208]
a8=-7.05021e-010a10=2.04492e-012a12=-2.97985e-015
[0209]
各种数据
[0210][0211][0212]
在倾斜方向上在广角端处各像高的倾斜图像移位灵敏度数据
[0213][0214]
在与倾斜方向正交的方向上在广角端处各像高的倾斜图像移位灵敏度数据
[0215][0216]
相对于广角端的ois光学系统的偏心度的偏心方向上的各像高的偏心灵
[0217]
敏度数据
[0218][0219]
相对于广角端的ois光学系统的偏心度的与偏心方向正交的方向上的各像高的偏心灵敏度数据
[0220][0221]
[数值示例3]
[0222]
单位:mm
[0223]
表面数据
[0224][0225]
[0226]
各种数据
[0227][0228]
在倾斜方向上在广角端处各像高的倾斜图像移位灵敏度数据
[0229][0230]
在与倾斜方向正交的方向上在广角端处各像高的倾斜图像移位灵敏度数据
[0231][0232]
[数值示例4]
[0233]
单位:mm
[0234]
表面数据
[0235][0236]
非球面数据
[0237]
第15表面
[0238]
k=0.00000e+000a4=2.14904e-005a6=-6.26885e-009
[0239]
a8=3.11936e-010a10=-1.96590e-012a12=3.25155e-015
[0240]
各种数据
[0241][0242]
在倾斜方向上在无限远处的对焦状态下各像高的倾斜图像移位灵敏度数据
[0243][0244]
在与倾斜方向正交的方向上在无限远处的对焦状态下各像高的倾斜图像移位灵敏度数据
[0245][0246]
相对于无限远处的对焦状态下的ois光学系统的偏心度的偏心方向上的各像高的偏心灵敏度数据
[0247][0248]
相对于无限远处的对焦状态下的ois光学系统的偏心度的与偏心方向正交的方向上的各像高的偏心灵敏度数据
[0249][0250]
如上所述,根据本发明的构造在包括光轴中心的预定像点位置处可以容易且令人满意地提供图像稳定。
[0251]
各实施例将根据像点位置的针对成像光学系统101的倾斜的图像移位灵敏度的信息表达为由像点位置定义的矩阵格式的校正系数信息的校正系数表,但是本发明不限于该实施例。可以是倾斜图像移位灵敏度lsr(hr)或ls
θ
(h
θ
)、或根据倾斜图像移位灵敏度获取的离轴校正系数信息。即,图像移位灵敏度的信息可以是能够提供相对于成像光学系统101的倾斜的、预定像点位置的移动量的信息。
[0252]
各实施例已经将倾斜图像移位灵敏度描述为在与成像光学系统101的倾斜旋转轴正交的方向(r方向)上以及在与倾斜的旋转轴平行的方向上的各像高的信息。然而,倾斜图像移位灵敏度可以是针对预定倾斜方向的整个成像平面上的各像点位置而确定的信息。在这种情况下,可以是根据使用成像光学系统101的设计值获取的整个成像平面上的像点移动量而直接获取的倾斜图像移位灵敏度。
[0253]
各数值示例可以使用主光线的成像位置来获取像点位置,但是可以使用mtf(调制传递函数)的峰值位置来获取像点位置。
[0254]
相机微计算机202可以使用改变图像传感器201的有效像素区域的电子图像稳定功能来进行图像稳定。即,相机微计算机202可以用作图像稳定器之一。
[0255]
其他实施例
[0256]
还可以通过读出并执行记录在存储介质(也可更完整地称为“非临时性计算机可读存储介质”)上的计算机可执行指令(例如,一个或更多个程序)以执行上述实施例中的一个或更多个的功能、并且/或者包括用于执行上述实施例中的一个或更多个的功能的一个或更多个电路(例如,专用集成电路(asic))的系统或装置的计算机,来实现本发明的实施例,并且,可以利用通过由所述系统或装置的所述计算机例如读出并执行来自所述存储介质的所述计算机可执行指令以执行上述实施例中的一个或更多个的功能、并且/或者控制所述一个或更多个电路执行上述实施例中的一个或更多个的功能的方法,来实现本发明的实施例。所述计算机可以包括一个或更多个处理器(例如,中央处理单元(cpu),微处理单元
(mpu)),并且可以包括分开的计算机或分开的处理器的网络,以读出并执行所述计算机可执行指令。所述计算机可执行指令可以例如从网络或所述存储介质被提供给计算机。所述存储介质可以包括例如硬盘、随机存取存储器(ram)、只读存储器(rom)、分布式计算系统的存储器、光盘(诸如压缩光盘(cd)、数字通用光盘(dvd)或蓝光光盘(bd)
tm
)、闪存设备以及存储卡等中的一个或更多个。
[0257]
本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(cpu)、微处理单元(mpu)读出并执行程序的方法。
[0258]
上述各实施例可以提供控制装置、摄像装置、镜头装置、控制方法和存储介质,其中各个可以容易且令人满意地提供对包括光轴中心的预定像点位置的图像稳定。
[0259]
虽然参照示例性实施例对本发明进行了描述,但是应当理解,本发明并不限于所公开的示例性实施例。应当对所附权利要求的范围给予最宽的解释,以使其涵盖所有这些变型例以及等同的结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1