一种无线供电隐蔽通信系统的资源分配优化方法
1.本发明涉及一种移动通信方法,尤其是涉及一种无人机支持下的无线供电隐蔽通信系统的资源分配优化方法。
背景技术:
2.随着通信场景变得越来越复杂,传统的固定基站将不再适应各种场景复杂的通信系统,而无人机(unmanned aerial vehicle,uav)便有着体积小、低消耗、便捷以及强大的战场生存能力的优点,成为了近期研究主题的热潮。无人机协同的通信网络系统,也给基站所不能覆盖的通信场景提供了一种很好的解决办法。另一方面,无人机作为移动基站时,可以很好的控制与合法接收设备(legitimate device,ld)的距离,从而形成视距传输信道(line of sight,los),这可以很好的进行数据传输,但很容易被非法设备侦听,所以无人机通信的安全问题也越来越重要。
3.传统的安全通信上,往往考虑的是让窃听者在窃取到信号后,无法准确的解析出正确的内容;这种安全措施,在一些场景下显然不太适用,例如:军工场景;此场景下应该要避免任何信息的泄漏;故隐蔽通信(covert communication,cc)的概念随之而生,隐蔽通信致力于隐藏所有传输的信息,让窃听者无法发现信息的传输,这样自然就避免了信息被窃取,从而实现了信息安全。近几年,隐蔽通信的相关研究也越来越被许多人重视。
4.能量收集(energy harvesting,eh)技术因其能为无线传感网络等能量受限网络提供稳定的能量并延长网络生命周期而具有大好发展前景。同时,能量收集技术的能量来源不仅包括周围环境的大多数自然能源,如太阳能、光能、风能、热能、化学能等,还可以将接收的周围无线信号转化成一种电能,如人工获取的射频(radio frequency,rf)信号。所以基于rf信号的能量收集因其可以不受天气环境影响并提供稳定能量成为研究热点。随着无线技术的快速发展和移动设备的数量急剧增加,像手机和可穿戴的小型设备等用户设备产生了巨大的数据量,如何为这些设备功能,提高便携性成为了一个具有挑战性的问题。无线能量传输(wireless power transfer,wpt)技术可以收集外在rf信号并通过电路设计将其转化为直流(direct current,dc)电路用于无线信息传输(wireless information transfer,wit),从而处理一些能量受限和不稳定网络的能量瓶颈问题。
5.综合而言,目前将uav结合的wpt与wit的研究中并没有考虑通信安全问题,这往往会引起很大的安全漏洞;而关于隐蔽通信的相关研究中也没有考虑wpt网络的场景,因为此场景uav发射功率很大很难实现隐蔽通信,所以此研究显得极其重要,存在着许多的挑战。另一方面,wpt网络中,rf信号往往不承载信息,只对lds有干扰作用,本发明就赋予了rf信号新的作用:作为窃听者的干扰信号;从而实现了该信号的复用,为系统提供了新的解决方案。在问题求解上也提出了多种近似方法,解决了非凸问题难以求解的问题。
技术实现要素:
6.本发明提供了一种无线供电隐蔽通信系统的资源分配优化方法,解决了现有uav
无线通信系统结合wpt技术中的通信安全问题,其技术方案如下所述:
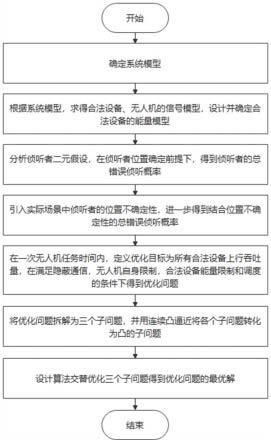
7.一种无线供电隐蔽通信系统的资源分配优化方法,包括以下步骤:
8.s1:建立无人机、合法设备和侦听者的系统模型,所述无人机和合法设备存在调度策略;
9.s2、根据系统模型,求得合法设备、无人机的信号模型,设计并确定合法设备的能量模型;
10.s3、分析侦听者二元假设,在侦听者位置确定前提下,得到侦听者的总错误侦听概率;
11.s4、引入实际场景中侦听者的位置不确定性,得到结合位置不确定性的总错误侦听概率;
12.s5、在一次无人机任务时间内,定义优化目标为所有合法设备上行吞吐量,在满足隐蔽通信,无人机自身限制,合法设备能量限制和调度的条件下得到优化问题;
13.s6、将优化问题拆解为多个子问题,并用连续凸逼近将各个子问题转化为凸的子问题;
14.s7、设计算法交替优化多个子问题,进而得到优化问题的最优解。
15.进一步的,步骤s1中,建立系统模型包括以下步骤:
16.s11:设定系统模型包括一个无人机、多个合法设备和多个侦听者;确定合法设备、侦听者的数量和位置;
17.其中,合法设备的位置为其中b代表合法设备,k代表第k个合法设备,x
b,k
和y
b,k
分别表示第k个合法设备位于地面的横纵坐标位置信息;
18.侦听者hws位置表示为其中w代表侦听者,m代表第m个侦听者,x
w,m
和y
w,m
分别表示第m个侦听者位于地面的横纵坐标位置信息;
19.无人机的飞行高度为h,并且一个任务时间为t,飞行的最大速度为v
max
,无人机在一个时隙δ
t
的最大飞行距离为l=v
max
δ
t
,无人机的轨迹表示为其中a表示无人机,n表示第n个时隙,qa表示无人机uav的轨迹;
20.s12:在第n个时隙,对第k个合法设备用ak[n]表示调度策略参数,调度策略即针对合法设备提出,表示一个时隙仅允许一个合法设备与无人机进行通信,对第k个合法设备而言,ak[n]=1表示该设备在第n个时隙会与无人机通信,ak[n]=0表示该设备不会与无人机通信,并且在每个时隙有
[0021]
s13:设定无人机最大发射功率、平均发射功率;
[0022][0023][0024]
其中pa[n]表示无人机发射功率,为无人机平均发射功率,p
max
为无人机最大发射功率。
[0025]
进一步的,步骤s2中,包括以下步骤:
[0026]
s21、无人机自主控制与合法设备之间的距离,结合合法设备的调度策略得到第k个合法设备在第n个时隙的接收信号r
b,k
[n]为:
[0027][0028]
其中pa[n]表示无人机发射功率,表示第k个合法设备lds的噪声;sa[n]表示无人机的传输信号;而ω
ab,k
[n]表示无人机到第k个合法设备的信道增益,进一步表达为:
[0029][0030]
该式中,ω0表示参考距离为1m的信道增益参数,q
b,k
表示第k个合法设备的位置,q
a[n]
就表示无人机在第n个时隙的轨迹,h表示无人机的飞行高度;
[0031]
s22、得到每个时隙的每个合法设备的接收能量;
[0032]
其中,每个时隙第k个合法设备的接收能量p
h,k
[n]为:
[0033]
p
h,k
[n]=ηpa[n]ω
ab,k
[n]
[0034]
其中pa[n]表示无人机发射功率,η为能量收割系数,ω
ab,k
[n]表示无人机到第k个合法设备的信道增益;
[0035]
s23、得到每个时隙无人机的接收信号;
[0036]
其中,由合法设备调度策略推导得出无人机的接收信号ra[n]为:
[0037][0038]
p
b,k
[n]代表第k个合法设备lds的发射功率;表示无人机uav的接收噪声;s
b,k
[n]~n(0,1)表示第k个合法设备lds发射的调制信号,ω
ab,k
[n]表示无人机uav到第k个合法设备lds的信道增益,ak[n]=1表示该设备在第n个时隙会与无人机uav通信,ak[n]=0表示该设备不会与无人机uav通信,并且在每个时隙有
[0039]
s24、得到所有合法设备的总上行吞吐率;
[0040]
在第n个时隙,无人机端所接收到的总上行吞吐率r
b,k
[n]为:
[0041][0042]
其中i表示求和计数的临时变量,σa表示无人机uav接收噪声的参数信息;
[0043]
s25、设计并确定合法设备的能量模型;
[0044]
对于所有合法设备,必须遵循能量因果性,即此时隙所消耗的能量不能够大于此时隙收割到的能量与之前时隙剩余能量之和,表达式写为:
[0045][0046]
其中q
b,k
[n]表示第k个合法设备ld在n个时隙时的总能量,q0表示初始能量;i就是
一个求和计数的临时变量;η为能量收割系数;ak[n]=1表示该设备在第n个时隙会与无人机uav通信,ak[n]=0表示该设备不会与无人机uav通信,并且在每个时隙有
[0047]
进一步的,步骤s3具体包括以下步骤:
[0048]
s31、得到每个时隙每个侦听者的二元假设模型;
[0049]
设定侦听者hws使用联合侦听策略,得到第m个侦听者在第n个时隙的二元假设表达:
[0050][0051][0052]
其中表示第m个侦听者的接收噪声;h
0,k
表示原假设:认为所侦听的第k个合法设备没有传输信息;h
1,k
表示备择假设:认为所侦听的合法设备传输了信息;j表示求和计数的临时变量;r
w,m
表示第m个侦听者的接收信号;s
b,j
[n]~n(0,1)表示第j个合法设备ld发射的调制信号;aj[n]表示第j个合法设备ld在第n个时隙会与无人机uav通信的状态;p
b,j
[n]表示第j个合法设备的发射功率;ω
aw,m
[n]表示无人机uav到第m个侦听者hws的信道增益;ω
wb,j
[n]表示第m个侦听者到第j个合法设备的信道增益;
[0053]
侦听者的判断准则为:
[0054][0055]
其中p
w,m,k
[n]表示侦听者hws测量l次后得到的周围信号功率均值;表示侦听者hws测量1次后得到的周围信号功率值;p
th,m,k
[n]表示判决门限值;d0和d1表示对应于h
0,k
和h
1,k
的判决结果;
[0056]
s32、得到每个时隙每个侦听者的漏检概率和错检概率;
[0057]
其中第m个侦听者hws的错检概率ξ
f,m,k
[n]和漏检概率ξ
m,m,k
[n]表示为:
[0058][0059][0060]
pr表示数学上求概率;表示第m个侦听者的接收噪声对应的参数,pa[n]表示无人机发射功率,ω0表示参考距离为1m的信道增益参数,q
b,k
表示第k个合法设备的位置,q
a[n]
就表示无人机在第n个时隙的轨迹,h表示无人机的飞行高度,q
w,m
表示侦听者位置;
[0061]
s33、得到每个时隙每个侦听者的总错误侦听概率;
[0062]
在侦听者hws角度,他们只知道发射功率pa[n]是从0到p
max
的范围值,设定对于侦听者pa[n]服从均匀分布,其概率密度函数pdf写为:
[0063][0064]
故错检概率推导为:
[0065][0066][0067]
同理,漏检概率推导为:
[0068][0069]
其中
[0070]
综上,进一步可得总侦听错误概率ξ
m,k
[n]为:
[0071][0072]
在该发明的场景中p3≤p2总是成立的,总错误侦听概率ξ
m,k
[n]在[p1,p3]区间关于p
th,m,k
是单调递减;在区间[p2,p4],总错误侦听概率ξ
m,k
[n]是关于单调递增,故最小错误概率在区间[p3,p2]中取得;故最小错误侦听概率为:
[0073][0074]
也是一个与侦听者hws确切位置(x
w,m
,y
w,m
)相关的函数。
[0075]
进一步的,步骤s4中,
[0076]
加入侦听者hws位置不确定性后,最小平均错误概率写为:
[0077][0078]
x
w,m
和y
w,m
分别表示第m个侦听者位于地面的横纵坐标位置信息,上式近似为:
[0079][0080]
其中
[0081][0082][0083]
x
b,k
和y
b,k
分别表示第k个合法设备位于地面的横纵坐标位置信息,x和y均表示不确定变量;
[0084]
得到加入位置不确定性的最佳的最小平均错误侦听概率为:
[0085][0086]
令便得到隐蔽通信的约束条件,其中ρw为给定的隐蔽通信限制参数。
[0087]
进一步的,步骤s5具体包括以下步骤:
[0088]
在一次无人机任务时间内,定义优化目标为所有合法设备上行吞吐量,在满足隐蔽条件通信,无人机自身限制,合法设备能量限制和调度的条件下得到优化问题,并令
[0089]
故优化问题推导为:
[0090][0091][0092][0093]
||qa[n]-qa[n-1]||2≤l2,(c)
[0094][0095][0096][0097]
其中该优化问题p1目标为最大化上行总吞吐量;a为调度策略约束,b为隐蔽通信约束,c为无人机飞行速度约束,d为无人机最大发射功率约束,e为无人机平均发射功率约束,f为合法设备能量因果性约束。
[0098]
进一步的,步骤s6将优化问题p1分解成p2、p3、p4三个子问题交替求解,具体包括以下步骤:
[0099]
s61、固定无人机发射功率、所有合法设备发射功率和调度参数,得到无人机轨迹优化子问题p2;
[0100]
s62、用连续凸逼近,将无人机轨迹子问题p2转化为凸的问题p2.1;
[0101]
s63、固定无人机轨迹和合法设备的调度参数,得到功率优化子问题p3;
[0102]
s64、固定无人机轨迹、无人机发射功率和合法设备发射功率,得到合法设备调度优化子问题p4;
[0103]
s65、放松调度策略约束条件,将合法设备调度优化子问题p4转化成凸的问题p4.1,并通过塑形算法得到子问题p4的最优解。
[0104]
进一步的,步骤s65中,塑形方法为:令为优化问题的最优解,根据次最优解得到所有合法设备的上行吞吐量之后对上行吞吐量非零的子集k,有此时将同时当上行吞吐量过小时,也应该将对应调度置为零,因为此时通信不再具有意义,即综上,得到调度策略子问题(p4)的最优解
[0105]
进一步的,步骤s7中,实施算法后得到最优的无人机轨迹发射功率合法设备调度策略合法设备发射功率以及最优上行总吞吐量
[0106]
所述算法的过程如下处理:
[0107]
s11:先通过求解子问题p3得到算法迭代一次后的无人机发射功率、合法设备发射功率;
[0108]
s12:再将最新得到的无人机发射功率、合法设备发射功率带入子问题p2.1中更新无人机飞行轨迹;
[0109]
s13:最后再将最新的无人机发射功率、合法设备发射功率和无人机飞行轨迹带入子问题p4.1求解得到最新合法设备调度策略;
[0110]
s14:如果求解结果结果没有收敛或精度不符合要求,转至步骤s11;否则,得到最终结果;
[0111]
实施算法后可以得到最优的无人机轨迹发射功率合法设备调度策略合法设备发射功率以及最优上行总吞吐量
[0112]
所述无线供电隐蔽通信系统的资源分配优化方法,通过引入隐蔽通信,并针对合法设备的供能设计了新方法:将uav的发射信号复用用于干扰侦听者侦听和为合法设备供能。
附图说明
[0113]
图1是所述无线供电隐蔽通信系统的资源分配优化方法的流程示意图;
[0114]
图2是所述无线供电隐蔽通信系统的资源分配优化方法的系统模型示意图;
[0115]
图3是所述无线供电隐蔽通信系统的资源分配优化方法的算法流程图。
具体实施方式
[0116]
本发明提供了一种无人机支持下的无线供电隐蔽通信系统的资源分配优化方法,包括构建系统模型、侦听者二元假设、隐蔽条件推导、提出及解决资源分配问题四个部分,具体包括以下步骤:
[0117]
s1、构建系统模型,确定无人机、合法设备和侦听者的数量及相互之间的联系状态。
[0118]
具体包括以下步骤:
[0119]
s11、假设该系统有一个无人机(uav),k个合法设备(lds)和m个侦听者(hws)。其中无人机uav和合法设备lds都配有两根天线以实现全双工工作,并假设能够完全消除自干扰;侦听者仅配有一根天线。
[0120]
无人机uav有三个功能:(1)给予合法设备lds提供下行能量服务;(2)收集所有合法设备lds的上行传输的信息;(3)干扰侦听者hws的侦听。
[0121]
在三维坐标中,合法设备lds的位置为其中b代表合法设备lds,k代表第k个合法设备lds,x
b,k
和y
b,k
分别表示第k个合法设备位于地面的横纵坐标位置信息。
[0122]
同理,侦听者hws位置可表示为其中w代表侦听者hws,m代表第m个侦听者hws,x
w,m
和y
w,m
分别表示第m个侦听者位于地面的横纵坐标位置信息。鉴于实际场景下,往往不能准确知道侦听者hws的位置,所以侦听者hws位置又可进一步表示为:
[0123][0124]
其中表示侦听者hws的位置不确定性,均服从而表示预估的侦听者hws位置,εw表示位置不确定性相应参数。
[0125]
无人机uav的飞行高度为h,并且一个任务时间(飞行周期)为t,飞行的最大速度为v
max
。同时,将飞行周期划分为n个时隙,故每个时隙的长度有当δ
t
足够小时,可以认为无人机uav的位置在这个时隙内近乎不变。无人机uav在一个时隙最大飞行距离为l=v
max
δ
t
。因此,无人机uav的轨迹可以表示为其中a表示无人机uav。n表示第n个时隙,qa表示无人机uav的轨迹。
[0126]
综上,q为位置信息,从右下角标区别是哪个设备的位置信息。这样,a表示无人机uav,那么qa就表示无人机uav的轨迹,和前文的q
b,k
以及q
w,m
相照应。
[0127]
s12、在第n个时隙,对第k个合法设备lds用ak[n]表示调度策略参数,n表示所分割时隙中的第n个时隙。a表示无人机uav;调度策略即针对合法设备lds提出,目的是为了避免信道拥塞,具体是一个时隙仅允许一个合法设备lds与无人机uav进行通信;故,对第k个合法设备lds而言,ak[n]=1表示该设备在第n个时隙会与无人机uav通信,ak[n]=0表示该设备不会与无人机uav通信,并且在每个时隙有
[0128]
s13、根据s11的模型,对无人机uav的飞行轨迹有:||qa[n]-qa[n-1]||2≤l2;l表示无人机uav在一个时隙最大飞行距离。
[0129]
对无人机uav的发射功率有:
[0130][0131][0132]
其中pa[n]表示无人机uav发射功率,为无人机uav平均发射功率,p
max
为无人机uav最大发射功率。
[0133]
s2、根据系统模型,求得合法设备、无人机的信号模型,设计并确定合法设备的能量模型。
[0134]
具体包括以下步骤:
[0135]
s21、无人机通信系统中,由于无人机uav可以自主控制与合法设备lds之间的距离,所以可看做视距传输,故结合合法设备lds的调度策略可得到第k个合法设备lds在第n个时隙的接收信号r
b,k
[n]为:
[0136][0137]
其中pa[n]表示无人机uav发射功率,表示第k个合法设备lds的噪声;sa[n]表示无人机uav的传输信号;而ω
ab,k
[n]表示无人机uav到第k个合法设备lds的信道增益,可表达为:
[0138][0139]
该式中,ω0表示参考距离为1m的信道增益参数,q
b,k
表示第k个合法设备的位置,q
a[n]
就表示无人机uav在第n个时隙的轨迹,h表示无人机uav的飞行高度。
[0140]
s22、进一步可知每个时隙第k个合法设备lds的接收能量p
h,k
[n]为:
[0141]
p
h,k
[n]=ηpa[n]ω
ab,k
[n]
[0142]
其中pa[n]表示无人机uav发射功率,η为能量收割系数,ω
ab,k
[n]表示无人机uav到第k个合法设备lds的信道增益。
[0143]
s23、由合法设备lds调度策略可推导得出无人机uav的接收信号ra[n]为:
[0144][0145]
其中p
b,k
[n]代表第k个合法设备lds的发射功率;表示无人机uav的接收噪声;s
b,k
[n]~n(0,1)表示第k个合法设备lds发射的调制信号,ω
ab,k
[n]表示无人机uav到第k个合法设备lds的信道增益,ak[n]=1表示该设备在第n个时隙会与无人机uav通信,ak[n]=0表示该设备不会与无人机uav通信,并且在每个时隙有
[0146]
s24、进一步在第n个时隙,无人机uav端所接收到的总上行吞吐率r
b,k
[n]为:
[0147]
[0148]
其中i表示求和计数的临时变量。σa表示无人机uav接收噪声的参数信息。
[0149]
s25、对于所有合法设备lds,必须遵循能量因果性,即此时隙所消耗的能量不能够大于此时隙收割到的能量与之前时隙剩余能量之和。表达式可以写为:
[0150][0151]
其中q
b,k
[n]表示第k个合法设备ld在n个时隙时的总能量,q0表示初始能量。i就是一个求和计数的临时变量,无实际意义,后文的i,j都是这个作用。将飞行周期划分为n个时隙,故每个时隙的长度有当δ
t
足够小时,可以认为无人机uav的位置在这个时隙内近乎不变。ak[n]=1表示该设备在第n个时隙会与无人机uav通信,ak[n]=0表示该设备不会与无人机uav通信,并且在每个时隙有
[0152]
s3、分析侦听者hws二元假设,在侦听者hws位置确定前提下,得到侦听者hws的总错误侦听概率。
[0153]
具体包括以下步骤:
[0154]
s31、要使侦听者hws不能够准确判断合法设备lds是否正在通信,需要站在侦听者hws角度分析二元假设,并得到最小的总侦听错误概率。假设侦听者hws使用联合侦听策略。故,可以得到第m个侦听者在第n个时隙的二元假设表达:
[0155][0156][0157]
其中表示第m个侦听者的接收噪声。h
0,k
表示原假设:认为所侦听的第k个合法设备没有传输信息,h
0,k
如上文说明的是原假设,然后接了一个冒号,表示后面的表达式整体就是h
0,k
。同理,h
0,k
表示备择假设:认为所侦听的合法设备传输了信息。j表示求和计数的临时变量,以便和k避免冲突。r
w,m
表示第m个侦听者的接收信号。
[0158]
上文中,s
b,k
[n]~n(0,1)表示第k个合法设备lds发射的调制信号,对应的,s
b,j
[n]~n(0,1)表示第j个合法设备lds发射的调制信号,只是改变了表达方式,故表示除了j≠k外的所有合法设备lds的信号和,表示包含k在内的所有合法设备lds的信号和。
[0159]
上文中,ak[n]=1表示该设备在第n个时隙会与无人机uav通信,ak[n]=0表示该设备不会与无人机uav通信,并且在每个时隙有对应的,aj[n]依旧表示第j个合法设备lds在第n个时隙会与无人机uav通信的状态。
[0160]
上文中,p
b,k
[n]代表第k个合法设备lds的发射功率,对应的,p
b,j
[n]依旧表示第j个合法设备的发射功率。
[0161]
上文中,ω
ab,k
[n]表示无人机uav到第k个合法设备lds的信道增益,对应的,ω
aw,m
[n]表示无人机uav到第m个侦听者hws的信道增益。
[0162]
ω
wb,j
[n]表示(第m个)侦听者到第j个合法设备的信道增益。
[0163]
而侦听者的判断准则为:
[0164][0165]
其中p
w,m,k
[n]表示侦听者hws测量l次后得到的周围信号功率均值;表示侦听者hws测量1次后得到的周围信号功率值;p
th,m,k
[n]表示判决门限值;d0和d1表示对应于h
0,k
和h
1,k
的判决结果。
[0166]
s32、进一步第m个侦听者hws的错检概率ξ
f,m,k
[n]和漏检概率ξ
m,m,k
[n]可表示为:
[0167][0168][0169]
pr表示数学上求概率。表示第m个侦听者的接收噪声对应的参数,pa[n]表示无人机uav发射功率,ω0表示参考距离为1m的信道增益参数,q
b,k
表示第k个合法设备的位置,q
a[n]
就表示无人机uav在第n个时隙的轨迹,h表示无人机uav的飞行高度,q
w,m
表示侦听者hws位置。
[0170]
s33、实际场景上,所有的侦听者hws不能准确的知道uav的发射功率pa[n],因此可以对侦听者hws进行隐蔽条件推导,在侦听者hws角度,他们只知道发射功率pa[n]是从0到p
max
(最大发射功率)的范围值,所以可以合理假设对于侦听者pa[n]服从均匀分布,其概率密度函数(pdf)可写为:
[0171][0172]
故错检概率可推导为:
[0173][0174]
其中用一些变量,等价替换复杂的表达式,变量的表示就是等式右边的式子意义,
[0175][0176]
同理,漏检概率可推导为:
[0177][0178]
其中
[0179]
综上,进一步可得总侦听错误概率ξ
m,k
[n]为:
[0180][0181]
在该发明的场景中p3≤p2总是成立的。容易发现,总错误侦听概率ξ
m,k
[n]在[p1,p3]区间关于p
th,m,k
是单调递减;在区间[p2,p4],总错误侦听概率ξ
m,k
[n]是关于单调递增,故最小错误概率在区间[p3,p2]中取得;故最小错误侦听概率为:
[0182][0183]
注意,此也是一个与侦听者hws确切位置(x
w,m
,y
w,m
)相关的函数。
[0184]
s4、引入实际场景中侦听者hws的位置不确定性,进一步得到结合位置不确定性的总错误侦听概率。实际上,无人机uav无法知道侦听者hws的确切位置,所以也是一个与侦听者hws确切位置(x
w,m
,y
w,m
)相关的函数。而由前步骤知所以加入侦听者hws位置不确定性后,最小平均错误概率可以写为:
[0185][0186]
从式子中可以发现直接求解复杂度相当的高,无法求得准确的最小错误侦听概率,故考虑近似求得最佳的最小平均错误侦听概率
[0187]
上式子可以近似为:
[0188][0189]
其中
[0190]
[0191][0192]
x和y分别表示侦听者的横坐标不确定变量和纵坐标不确定变量。
[0193]
进一步最终得到加入位置不确定性的最佳的最小平均错误侦听概率为:
[0194][0195]
令便可得到隐蔽通信的约束条件,其中ρw为给定的隐蔽通信限制参数。
[0196]
s5、提出及解决资源分配问题:在一次无人机任务时间内,定义优化目标为所有合法设备上行吞吐量,在满足隐蔽条件通信,无人机自身限制,合法设备能量限制和调度的条件下得到优化问题,并令
[0197]
故优化问题可推导为:
[0198][0199][0200][0201]
||qa[n]-qa[n-1]||2≤l2,(c)
[0202][0203][0204][0205]
其中该优化问题(p1)目标为最大化上行总吞吐量;(a)为调度策略约束,(b)为隐蔽通信约束,(c)为无人机飞行速度约束,(d)为无人机最大发射功率约束,(e)为无人机平均发射功率约束,(f)为合法设备能量因果性约束。
[0206]
s6、将优化问题拆解为三个子问题,并用连续凸逼近将各个子问题转化为凸的子问题。
[0207]
具体包括以下步骤:
[0208]
s61、因为(p1)本身的非凸性,无法直接使用优化工具求解,故考虑交替优化方式将(p1)转化为多个不同的凸的子问题加以解决。先固定{pa,pb,a}为常数,那么(p1)可以转化为:
[0209][0210][0211][0212]
||qa[n]-qa[n-1]||2≤l2,(c)
[0213]
然而子问题(p2)的目标函数和隐蔽通信约束依旧是非凸的;但容易知道是关于|qa[n]-q
b,k
|2的凸函数,故令表示优化子问题(p2)第j次后的迭代结果,那么目标函数可以以|qa[n]-q
b,k
|2为整体在点进行一阶泰勒展开变为凸的。那么目标函数变为:
[0214][0215]
为了将约束条件转化为凸的,需要引入松弛变量
[0216]q1,k
[n]≥|qa[n]-q
b,k
|2and q
2,m
[n]≥|qa[n]-q
w,m
|2[0217]
那么优化子问题(p2)可变为(p2.1):
[0218][0219][0220][0221]q1,k
[n]≥|qa[n]-q
b,k
|2[0222]
||qa[n]-qa[n-1]||2≤l2[0223]q2,m
[n]≥|qa[n]-q
w,m
|2[0224]
在得到第j次无人机轨迹迭代结果后,可以得到第(j+1)次结果写为综上(p2)子问题转化为了可以解决的(p2.1)子问题。
[0225]
s62、固定{qa,a},可以得到无人机uav功率和合法设备lds功率优化子问题(p3),写为:
[0226][0227][0228][0229][0230][0231]
可见,(p3)关于pb,pa是凸问题,不用进一步处理,故可以直接用凸优化工具求解。
[0232]
s63、固定{qa,pa,pb},可以得到优化合法设备调度子问题(p4),写为:
[0233][0234][0235][0236][0237]
然而,子问题(p4)也是一个非凸问题,考虑放松调度策略约束条件,即让ak[n]取值可连续,则(p4)可变为(p4.1):
[0238]
(
[0239][0240][0241][0242]
此时优化子问题(p4.1)变为凸的,在求解出最优解ak[n]后,需要将连续值重塑为离散值。塑形方法为:令为子问题(p4.1)的最优解,根据次最优解得到所有合法设备的上行吞吐量之后对上行吞吐量非零的子集k,有此时可以将同时当上行吞吐量过小时,也应该将对应调度置为零,
因为此时通信不再具有意义,即综上,可以得到调度策略子问题(p4)的最优解
[0243]
综上,p1是原优化问题,即最初要解决的优化问题。但因为p1是非凸优化问题,没办法求解,所以将p1分解为了p2、p3、p4三个子问题交替求解。然后分解后的子问题p2依旧是非凸优化问题,所以还是没办法直接求解,随后便采用数学技术将p2等价为p2.1;最终p2.1就是一个可以求解的凸优化问题。子问题p3是个凸优化问题所以可以直接求解。子问题p4和p2一样是非凸优化问题,使用数学方法等价为p4.1求解。
[0244]
p1:原优化问题,非凸优化问题;
[0245]
p2:p1的子优化问题,非凸优化问题;
[0246]
p2.1:p2的等价,凸优化问题;
[0247]
p3:p1的子优化问题,凸优化问题;
[0248]
p4:p1的子优化问题,非凸优化问题;
[0249]
p4.1:p4的等价,凸优化问题。
[0250]
s7、设计算法交替优化三个子问题得到优化问题的最优解。详细算法见图3。对于图3提供的算法,陈述如下:
[0251]
步骤一:先通过求解子问题p(3)得到算法迭代一次后的无人机发射功率、合法设备发射功率;
[0252]
步骤二:再将最新得到的无人机发射功率、合法设备发射功率带入子问题p(2.1)中更新无人机飞行轨迹;
[0253]
步骤三:最后再将最新的无人机发射功率、合法设备发射功率和无人机飞行轨迹带入子问题p(4.1)求解得到最新合法设备调度策略;
[0254]
步骤四:如果求解结果结果没有收敛或精度不符合要求,转至步骤一;否则,得到最终结果。
[0255]
实施算法后可以得到最优的无人机轨迹发射功率合法设备调度策略合法设备发射功率以及最优上行总吞吐量
[0256]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1