一种图像曝光方法、计算机设备及存储介质与流程
1.本发明属于激光成像领域,尤其涉及到激光器逐环曝光图像的方法、计算机设备及存储介质。
背景技术:
2.参考图1,图1的左边是控制系统1控制的安装有若干个(示例性的画出3个)激光器31的横梁2的主视图;图1的中间是需要曝光的若干行(示例性的画出了9行)图像;图1的右边,是横梁2及3个激光器31的右视图。控制系统1控制横梁2上的3个激光器31逐行曝光图像4中的9行图像,具体曝光方法如下:控制系统1控制横梁2从图像的左边起始点向右运动,3个激光器31从左到右依次曝光第1行,第4行,第7行图像。曝光完毕后,控制系统1控制横梁2退回到图像左边的起始点,然后控制横梁2向下移动一个像素点的距离(即每相邻两行图像间隔的距离),控制系统1控制横梁2又从图像左边起始点向右运动,3个激光器依次曝光第2行、第5行、第8行图像。曝光完毕后,控制系统1控制横梁2退回到图像左边的起始点,然后控制横梁2又向下移动一个像素的距离,控制系统1控制横梁2从图像左边起始点向右运动,3个激光器31依次曝光第3行、第6行、第9行图像。也就是说,处于横梁2最上面的第一个激光器31曝光了9行图像的第1,2,3行,中间第二个激光器31曝光了第4,5,6行图像,最下面的第3个激光器曝光了第7,8,9行图像。
3.上述曝光方法只适合激光器的运动路径为直线的情形,或者说图像被水平划分为若干行的情形,这种情况下,每个激光器单位时间内经过的距离是相同的,因此,在感光胶片上感光层厚度一致的情形下,每个激光器的出光功率保持一致。参考图2,在某些情形下,若干曝光图像5以转盘6的回转中心为圆心o均匀布置在转盘6的上端面上,若干个激光器(示例性的画出3个)设置在横梁2上,当横梁2转动而转盘6不动或者横梁2静止而转盘6转动时,则每个激光器31曝光图像的路径为半径不同的圆弧状图像带。可以理解的是,在横梁2的转速或者转盘6的角速度ω一定时,根据公式v=ω.r,距到圆心o的距离r越小的激光器31,单位时间内的线速度越小,曝光的图像带上的像素点越少,则激光器的出光功率越小;反之,到圆心o的距离r越大的激光器31,单位时间内的线速度越大,曝光的圆弧形图像带上像素点越多,则激光器的出光功率越大。若解决不好激光器的出光功率和曝光图像的不同半径的图像带之间的匹配问题,则图像的曝光质量会出现瑕疵,以至于造成感光胶片的浪费。
技术实现要素:
4.本发明提供了一种图像曝光方法,用于激光直接成像领域,其目的在于解决激光器的出光功率和曝光图像的不同半径的图像带之间的匹配问题。
5.本发明的方案如下:
6.一种图像曝光方法,包括如下步骤:
7.步骤1:将若干张图像经处理后以转盘的旋转中心为圆心环形均布在所述转盘上,
定义圆心为坐标原点(0,0),所述若干张图像的任意一张的任意一个像素点的坐标为(xi,yi);
8.步骤2:根据公式x
i2
+y
i2
=r2将所有图像的所有像素点分类到半径范围为r的环形图像带中;
9.步骤3:根据r确定q个激光器各自曝光的半径范围rq,r
min
≤rq≤r
max
;
10.步骤4:控制系统控制所述q个激光器随着rq的增加逐步加大出光功率且以恒定大小光斑逐环曝光所有若干张图像的全部像素点;
11.其中,i表示所有图像中的所有像素点的个数;r
min
为若干张图像中像素点距离圆心的最小半径值,r
max
为若干张图像中像素点距离所述圆心的最大半径值;离圆心最近的激光器的最小曝光半径为r
min
,离圆心最远的激光器的最大曝光半径为r
max
。
12.可选地,所述q个激光器成一行均布排列且其中一端指向坐标原点,定义q个激光器的每相邻两个间隔距离均为d,每个激光器曝光的图像的环数均定义为p环,每个像素点的半径为r,d=2r*p,r
max
=r
min
+2r*p*q,所述环形图像带共分割为q*p环图像条。
13.可选地,步骤4具体包括如下步骤:
14.步骤41:控制系统控制距离圆心最近的第1个激光器以半径r
min
曝光第1环图像条,第2个激光器曝光第(p+1)环图像条,第3个激光器曝光第(2p+1)环图像条,一直到第q个激光器曝光第(q-1)*p+1环图像条;
15.步骤42:控制系统控制第1个激光器曝光第2环图像条,第2个激光器曝光第(p+2)环图像条,第3个激光器曝光第(2p+2)环图像条,一直到第q个激光器曝光第(q-1)*p+2环图像条;直到
16.步骤43:控制系统控制第1个激光器曝光第p环图像条,第2个激光器曝光第2p环图像条,第3个激光器曝光第3p环图像条,一直到第q个激光器曝光第q*p环图像条;
17.其中,第1环至第q*p环图像条按照所述图像条距离圆心由近及远划分。
18.可选地,所述q个激光器放置在一滑块上,所述滑块经所述控制系统控制带动所述q个激光器在一横梁上做靠近或者偏离所述圆心整体运动,r
min
大小由所述滑块在所述横梁上相对运动实现,r
max
随着r
min
的增大而增大,变小而变小。
19.可选地,所述q个激光器每曝光完一环图像后,随同所述滑块在所述横梁上向偏离所述圆心的方向整体移动2r的距离。
20.可选地,每个像素点的半径r的大小由图像分辨率决定。
21.可选地,所述控制系统控制所述横梁绕着所述圆心匀速转动或者控制所述转盘绕着所述圆心匀速转动。
22.可选地,所述控制系统为单片机。
23.本发明还公开了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述图像曝光方法的步骤。
24.本发明还公开了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述图像曝光方法的步骤。
25.本发明的有益技术效果:在一个圆形工位上以圆心为中心均布若干图像,以圆心为坐标原点(0,0)计算每一幅图像的每一个像素点的位置坐标(xi,yi),根据公式x
i2
+y
i2
=r2,将若干图像上的每一个像素点分配在r
min
和r
max
之间的环形图像带内;根据图像分辨率
确定每一个像素点的半径r,然后将环形带内的若干像素点分成若干环半径不同的图像条,每相邻两图像条的间距为2r。控制系统控制设置在横梁上若干激光器沿着横梁运动,确保距离圆心最近的那个激光器处于半径为r
min
的位置,每相邻两激光器的距离为2r*p,p为每个激光器曝光的图像条的环数;控制系统控制转盘匀速转动或者横梁匀速转动,使若干激光器逐环曝光r
min
和r
max
之间的环形图像带内的所有像素点;在曝光过程中,控制系统控制激光器的功率也随着图像条的半径的增加而增加。因此,本方法可以一次曝光设置在转盘上的多块图像,且提高了曝光效率和曝光质量。
附图说明
26.图1为控制系统控制若干激光器曝光图像中若干行图像条的示意图;
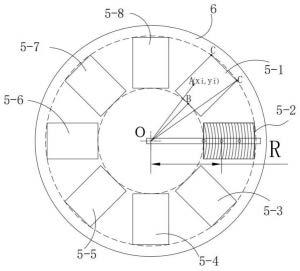
27.图2为转盘6上环形均布的8幅图像上所有的像素点均被划分为若干半径不同的环形图像条的示意图;
28.图3为控制系统1控制滑块21上的3个激光器在横梁2上绕着转盘6转动的示意图;
29.图4为转盘6上的某一幅图像上的任意一点a、距离圆心o最近的像素点b以及距离圆心o最远的像素点c的标识示意图;
30.图5为图像5-2上激光器31-1分别处于距离圆心o最近的距离rmin,激光器31-2处于第7环图像条离圆心o的距离为rmin+12r、激光器31-3处于第13环图像条离圆心o的距离为rmin+24r、相邻两激光器间隔距离d=12r、每个激光器曝光6环图像条的示意图;
31.图6为一些实施例中计算机设备的内部结构图。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“第一”、“第二”、“第三”仅用于描述区别,而不能理解为指示或暗示相对重要性,此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
34.参考图4,定义转盘6的旋转中心的坐标为原点o(0,0),原点o由图5中的转盘的转轴oo在水平面上投影得到。作为优选,转盘6优选为圆形平台。将若干需要曝光的感光胶片以旋转中心为圆心环形均匀布置在转盘6上,本专利申请中,示例性的画出感光胶片为8的情形,实际上,根据感光胶片的大小以及转盘6的大小情况,感光胶片的块数也可以是6块,12块,10块等等,在此不做限制。由于激光直接成像是将存储在计算机中的图像曝光在感光
胶片上,图4中的感光胶片也可以理解为需要曝光的图像。因此,也可以理解为,图4中示例性的画出了8幅需要曝光的图像5-1到5-8均匀布置在转盘6上情形。一旦8幅需要曝光的图像在转盘6的位置固定后,且转盘6的圆心设置为坐标原点(0,0),则8幅图像5-1到5-8上所有像素点的位置坐标均可以通过计算机求出来。
35.参考图4,假设8幅图像5的其中一幅图像5-1上的某一像素点a的坐标为(xi,yi),i为8幅图像上所有像素点的个数,则a点到圆心o(0,0)的距离r根据公式x
i2
+y
i2
=r2求得。可以理解的是,每一幅图像5均由若干横、纵坐标不同的像素点组成,因此r是一个具有一定范围的变量值。定义图像5-1上到圆心o的距离为最小值rmin的像素点为b点,到圆心o的距离为最大值rmax的像素点为c点,可以理解的是,8福图像5中的所有像素点均落在半径为rmin到rmax的环形图像带内。而且,根据几何知识,其他7幅图像5的每一幅中像素点距离圆心o的最小值也为rmin,最大值也为rmax。
36.参考图3,3个激光器(激光器的个数定义为q,3个仅仅是示例性的)通过滑块21呈一排设置在横梁2上,横梁2的一端指向转轴oo,滑块21可以在横梁2上来回滑动,也就是说,3个激光器到圆心o的整体距离可调节。图3中,定义离横梁2的转轴oo(转轴oo的垂直投影为o,也就是图2中的圆心o)最近的一个激光器31-1曝光的最小半径值为r
min
,定义离横梁2的转轴oo最远的一个激光器31-3的曝光的最大半径值为r
max
。可以理解的是,由于滑块21在横梁2上相对于转轴oo可以做远离或者靠近运动,因此r
min
和r
max
均为变量,即大小可以调整。
37.定义q个激光器的每相邻两个之间的间隔距离为d,每个激光器曝光的图像的环数均为p环,每幅图像的每个像素点的半径为r,所述环形图像带共有q*p环图像,d=2r*p,r
max
=r
min
+2r*p*q。参考图5,例如,q取3,即有3个激光器,p取6,即每个激光器曝光6环图像条,每相邻两环图像条的半径差为2r,每相邻两个激光器31-1和31-2之间的距离d=2r*6=12r,r
max
=r
min
+2r*6*3=r
min
+2r*18。需要说明的是,r的大小取决于图像的分辨率,分辨率越高,r越小,即每个像素点占的空间越小。
38.参考图3,在一些实施例中,控制系统1通过如下具体控制方法控制3个激光器曝光8张图像5-1到5-8的:
39.控制系统1控制滑块21上的3个激光器31-1,31-2和31-3沿着横梁2向偏离转轴oo的方向运动,直到最左边的激光器31-1运到距离圆心o的半径为r
min
的位置处(见图5),中间位置的激光器31-2距离圆心o的半径为r
min
+2r*6,最右边的激光器31-3距离圆心o的半径为(r
min
+2r*12)。参考图3,控制系统1控制转盘6绕着转轴oo转动或者横梁2绕着转轴oo转动。激光器31-1曝光图5中图像5-2中最内侧的第1环的一个像素点1(假设图像5-2中满足的像素点只有1个),在转盘6绕着转轴oo转动或者横梁2绕着转轴oo转动一周的过程中,其余7幅图像上也各有1个像素点被激光器31-1曝光,因为它们的坐标都满足。在激光器31-1曝光的同时,激光器31-2也曝光图5中图像5-2中第7环的图像条上的若干像素点,该若干像素点的坐标均满足x
i2
+y
i2
=(r
min
+6*2r)2。同样的,其余7幅图像上的坐标满足x
i2
+y
i2
=(r
min
+6*2r)2的所有像素点也会被曝光。因此,在横梁2转动一周或者转盘6转动一周后,可以理解的是,8幅图像上坐标满足x
i2
+y
i2
=(r
min
+6*2r)2的所有像素点将会被曝光完毕。与此同时,激光器31-3曝光图5中图像5-2中第13环的图像条上的若干像素点,该若干像素点的坐标满足x
i2
+y
i2
=(r
min
+12*2r)2。同样的,其余7幅图像上的坐标满
足x
i2
+y
i2
=(r
min
+12*2r)2的所有像素点也会被曝光,因此,在横梁2转动一周或者转盘6转动一周后,可以理解的是,8幅图像上所有坐标满足x
i2
+y
i2
=(r
min
+12*2r)2的所有像素点将会被曝光。当转盘转动一周或者横梁2转动一周后,3个激光器31-1,31-2,31-3完成了8幅图像的第1环图像条上的所有像素点、第7环图像条的若干像素点和第13环图像条上的若干像素点曝光后回到初始位置。图3中的控制系统1控制3个激光器31-1,31-2,31-3在滑块21上沿着横梁2向偏离转轴oo的方向移动2r的距离,开始准备曝光8幅图像的第2环图像条上的若干像素点、第8环图像条上的若干像素点,以及第14环图像条上的若干像素点,见图5。可以理解的是,图5中的图像5-2及图4中的其他7幅图像上的第2环图像条的若干像素点、第8环图像条的若干像素点,以及第14环图像条的若干像素点的坐标分别满足x
i2
+y
i2
=(r
min
+2r)2、x
i2
+y
i2
=(r
min
+7*2r)2和x
i2
+y
i2
=(r
min
+13*2r)2。在转盘6转动一周或者横梁2转动一周的过程中,3个激光器31-1,31-2,31-3分别同时曝光完8幅图像上第2环图像条的若干像素点、第8环图像条的若干像素点,以及第14环图像条的若干像素点。完成第二轮曝光后,3个激光器31-1,31-2,31-3继续向前移动2r的距离,分别曝光8幅图像的第3环图像条上的所有像素点、第9环图像条上的所有像素点以及第15环图像条上的所有像素点,曝光完毕后继续向前移动2r的距离,一直到曝光完8幅图像的第6环图像条上的所有像素点、第12环图像条上的所有像素点以及第18环图像条上的所有像素点。此时,第6环图像条上的所有像素点的坐标满足x
i2
+y
i2
=(r
min
+5*2r)2,第12环图像条上的所有像素点的坐标满足x
i2
+y
i2
=(r
min
+11*2r)2,第18环图像条上的所有像素点的坐标满足x
i2
+y
i2
=r
max2
,rmax也等于rmin+17*2r。至此,3个激光器曝光完8幅图像上所有的像素点。
40.从上面的描述可以知道,激光器31-1曝光了8幅图像的1-6环图像条,激光器31-2曝光了7-12环图像条,激光器31-3曝光了13-18环图像条。需要说明的是,上述中激光器个数为3仅仅是示例性的,每个激光器曝光6环也仅仅是示例性的。根据同样的原理,当激光器的个数为q,每个激光器曝光的环数为p环图像条时,所述环形图像带共有q*p环图像条。定义q个激光器的每相邻两个间隔距离为d,d=2r*p,每个像素点的半径为r,r
max
=r
min
+2r*p*q。
41.另外,从图5中还可以理解的是,图像5-2中,偏离坐标原点(0,0)越远的图像带,其半径越大,由于图3中的转盘6的角速度ω为定值,根据公式v=ω.r,r越小,单位时间内的线速度v越小,经过的弧长也越小,激光器曝光的图像条上的像素点越少,控制系统控制激光器的出光功率越小;r越大,单位时间内的线速度v越大,弧长也越大,则激光器曝光的图像条上的像素点越多,控制系统控制激光器的出光功率越大。例如,图5中的激光器31-1在曝光图像5-2中的第2环图像条和第3环图像条时,由于第2环图像条到坐标原点(0,0)的距离小于第3环图像条到坐标原点(0,0)的距离,所以激光器31-1在单位时间内曝光的第3环图像条上的像素点的个数多于第2环图像条上的像素点,为保证每个像素点都能得到有效的曝光,可以理解的是,激光器31-1曝光第3环图像条时需要的功率大于曝光第2环图像条时需要的功率。由此不难理解,激光器31-1在逐次曝光图4中的8幅图像5-1至5-8中的前6环图像条时,所需要的功率逐渐增大;同样的,激光器31-2在逐次曝光图4中的8幅图像5-1至5-8中的中间6环图像条(即第7环至第12环)时,所需的激光功率也是逐次增加,且最小激光功率大于激光器31-1的最大出光功率;激光器31-3在逐次曝光图4中的8幅图像5-1至5-8中的后面6环图像条(即第13环至第18环)时,所需的激光功率也逐次增加,且需要的最小激光
功率大于激光器31-2的最大出光功率。上述各激光器的功率由控制系统控制实现逐渐增大的目的。
42.另外,需要说明的是,本技术中的任意一个激光器,在经过图4中的8幅图像的彼此之间的间隙时,由控制系统控制不出光。
43.本方法的技术效果:在一个圆形工位上以圆心为中心均布若干图像,以圆心为坐标原点(0,0)计算每一幅图像的每一个像素点的位置坐标(xi,yi),根据公式x
i2
+y
i2
=r2,将若干图像上的每一个像素点分配在r
min
和r
max
之间的环形图像带内;根据图像分辨率确定每一个像素点的半径r,然后将环形带内的若干像素点分成若干环半径不同的图像条,每相邻两图像条的间距为2r。控制系统控制设置在横梁上若干激光器沿着横梁运动,确保距离圆心最近的那个激光器处于半径为r
min
的位置,每相邻两激光器的距离为2r*p,p为每个激光器曝光的图像条的环数;控制系统控制转盘匀速转动或者横梁匀速转动,使若干激光器逐环曝光r
min
和r
max
之间的环形图像带内的所有像素点;在曝光过程中,控制系统控制激光器的功率也随着图像条的半径的增加而增加。因此,本方法可以一次曝光设置在转盘上的多块图像,且提高了曝光效率和曝光质量。
44.本发明中提到的控制系统,优选为单片机。单片机例如可以是常见的8位单片机、16位单片机和32位单片机。
45.本发明还公开了一种计算机设备,该计算机设备可以是服务器,其内部结构图可以如图6所示。该计算机设备包括通过系统总线连接的处理器、存储器和网络接口。其中,该计算机设备的处理器用于提供计算所有图像的所有像素点的坐标以及控制转盘、若干激光器、横梁和滑块的协调运动。该计算机设备的存储器包括非易失性存储介质和内存储器。该非易失性存储介质存储有操作系统、计算机程序和数据库。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现一种图像曝光方法。
46.本领域技术人员可以理解,图6中示出的结构,仅仅是与本技术方案相关的部分结构的框图,并不构成对本技术方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
47.在一些实施例中,提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现以下步骤:步骤1:将若干张图像经处理后以转盘的旋转中心为圆心环形均布在所述转盘上,定义圆心坐标为(0,0),所述若干张图像的任意一张的任意一个像素点的坐标为(xi,yi);步骤2:根据公式x
i2
+y
i2
=r2将所有图像的所有像素点分类到半径范围为r的环形图像带中;步骤3:根据r确定q个激光器各自的曝光的半径范围rq,r
min
≤rq≤r
max
;步骤4:控制系统控制所述q个激光器随着rq的增加逐步加大出光功率以恒定大小光斑逐环曝光所有若干张图像的全部像素点。
48.在一些实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理执行时实现以下步骤:步骤1:将若干张图像经处理后以转盘的旋转中心为圆心环形均布在所述转盘上,定义圆心坐标为(0,0),所述若干张图像的任意一张的任意一个像素点的坐标为(xi,yi);步骤2:根据公式x
i2
+y
i2
=r2将所有图像的所有像素点分类到半径范围为r的环形图像带中;步骤3:根据r确定q个激光器各自的曝光的半径范围rq,r
min
≤rq≤r
max
;步骤4:控制系统控制所述q个激光器随着rq的增加逐步加大出光功率以恒定大小光斑
逐环曝光所有若干张图像的全部像素点。
49.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和易失性存储器中的至少一种。非易失性存储器可包括只读存储器(read-only memory,rom)、磁带、软盘、闪存或光存储器等。易失性存储器可包括随机存取存储器(random access memory,ram)或外部高速缓冲存储器。作为说明而非局限,ram可以是多种形式,比如静态随机存取存储器(static random access memory,sram)或动态随机存取存储器(dynamic random access memory,dram)等。
50.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1