一种牙轮钻自动对孔系统及方法与流程
1.本发明涉及自动控制领域,特别涉及一种牙轮钻自动对孔系统及方法。
背景技术:
2.露天矿生产中,多数矿山使用牙轮钻机进行钻孔作业,为后续爆破工序提供基础服务。专利号:cn201210452066.5,专利名称《高精度gps牙轮钻机自动布孔系统》中,需要岗位操作人员接收到爆区坐标设计数据之后,拿出同步送达的纸质穿孔任务书,将其与终端屏幕上的孔数进行核对,核对完成后,按屏幕的孔位位置移动钻机,找准位置,开始穿孔作业,对孔的过程需要岗位操作人员人工介入。
技术实现要素:
3.为解决上述技术问题,本发明的目的是提供一种牙轮钻自动对孔系统及方法。
4.本发明的一种牙轮钻自动对孔系统,包括牙轮钻plc自动控制系统,其特征在于,包括车载工控机、北斗模块、车载北斗差分定位装置、远程操控中心iot服务器、差分基站和牙轮钻自动对孔软件;
5.所述车载工控机安装在牙轮钻驾驶室,用于完成向操作人员反馈信息、获取实时位置数据、计算与目标位置的偏差、与远程操控中心iot服务器进行数据交换、下发指令给牙轮钻plc自动控制系统的功能;
6.所述北斗模块安装在牙轮钻上,通过此模块获取的实时位置数据结合车载工控机计算得到精确的钻头位置;
7.所述车载北斗差分定位装置通过差分基站和北斗卫星使北斗模块获得更高精度的钻头实时位置数据;
8.所述远程操控中心iot服务器布设在远程操控中心,完成下发钻孔设计位置数据的功能;
9.所述差分基站布设在牙轮钻机无线通讯范围内,通过无线方式发送数据车载北斗差分定位装置;
10.所述牙轮钻自动对孔软件安装在车载工控机中,用于根据获取的钻孔位置数据、北斗坐标和地理坐标系、通过牙轮钻车车载工控机控制指令下发,实现对牙轮钻机安全、稳定地无人干预自动对孔。
11.本发明的一种牙轮钻自动对孔方法,采用上述牙轮钻自动对孔系统,按照以下步骤完成牙轮钻自动对孔:
12.步骤一、牙轮钻自动对孔软件利用无线传输方式从远程操控中心iot服务器获得钻孔设计位置数据;
13.步骤二、牙轮钻自动对孔软件获取车载北斗模块的钻头实时位置数据;
14.步骤三、车载工控机计算钻孔设计位置数据和钻头实时位置数据两者之间的偏差;
15.步骤四、判断偏差是否大于设定值,如果“是”则进行步骤五,如果“否”则对孔完成,结束操作;
16.步骤五、牙轮钻自动对孔软件根据钻孔设计位置数据和钻头实时位置数据计算牙轮钻的移动方式和距离,生成控制信号;
17.步骤六、牙轮钻自动对软件进行协议转换将控制信号转换为对应牙轮钻plc自动控制系统通讯协议的数据包,并通过通讯接口发送至牙轮钻plc自动控制系统,以使牙轮钻plc自动控制系统执行控制信号移动牙轮钻位置,移动完成后,返回执行步骤二,直到钻孔设计位置和钻头实时位置的偏差满足要求,完成对牙轮钻的自动对孔控制。
18.优选地,所述步骤一中的无线传输方式包括4g/5g/数传电台方式;传输协议采用物联网mqtt协议;远程服务器部署有物联网iot平台,设获取的爆破设计钻孔位置数据为bj-54地理坐标系格式,北斗芯片获取的经纬度为wgs-84地理坐标系,需要在工控机利用三参数转换模型完成bj-54地理坐标系跟wgs-84地理坐标系的转换,利用三参数转换模型转换为wgs-84地理坐标系格式,得到钻孔坐标(xd,yd),xd指钻孔设计位置的x坐标,yd指钻孔设计位置的y坐标;
19.三参数转换模型:
[0020][0021]
具体实现步骤如下:
[0022]
1)将两个坐标系bj-54地理坐标系和wgs-84地理坐标系的坐标都转为直角坐标;
[0023]
2)按所采用的三参数转换方法求解出转换参数;
[0024]
3)根据所求参数进行坐标转换;
[0025]
4)根据需要,将直角坐标再转为大地坐标。
[0026]
优选地,所述步骤二中,车载北斗模块安装有两根定位天线,能够同时获取两根天线安装部位的位置坐标,天线的安装部位与钻头形成等腰三角形,以钻头为等腰三角形顶点,再结合两根天线安装部位和钻头的相对位置关系,利用三角函数可以得到钻头的实时位置,钻头坐标设为(xr,yr),xr指钻头实时位置的x坐标,yr指钻头实时位置的y坐标。
[0027]
优选地,所述步骤三中,计算钻孔设计位置数据和钻头实时位置数据两者之间的偏差:
[0028]
优选地,步骤四中,判断偏差是否大于设定值是根据计算得到的钻孔设计位置数据和钻头实时位置数据两者之间的偏差dj与设定允许误差ds相比较,当dj》ds则执行步骤五;否则认为对孔完成,结束对孔操作。
[0029]
优选地,所述步骤五中,牙轮钻自动对孔软件根据钻孔设计位置数据和钻头实时位置数据计算牙轮钻的移动方式和距离,生成控制信号是根据钻孔设计位置数据和钻头实时位置数据,构建一个平面直角坐标系,以钻头位置为原点,以垂直于天线的安装部位与钻头形成等腰三角形底边为y轴,可以得到八种牙轮钻的移动方式,分别是垂直向上、垂直向下、向左、向右、先上后右、先上后左、先下后左,先下后右。
[0030]
优选地,步骤六中,将控制信号转换为对应牙轮钻plc自动控制系统通讯协议的数
据包时,包括市场上主流plc系列;根据牙轮钻机移动速度和需要移动的距离,计算出移动的时间;牙轮钻机需要拐90度弯的时候,将左侧的闸制动,发送前进指令则完成左拐;同理,将右侧的闸制动,发送前进指令则完成右拐。
[0031]
优选地,还包括设置在牙轮钻机驾驶室内的智能终端显示器,智能终端显示器由液晶屏和触摸屏组成,用于设置允许的位置误差和查看实时位置数据反馈。
[0032]
本发明的优点是:
[0033]
本发明钻孔位置数据获取、北斗坐标获取、地理坐标系转换、控制指令下发都通过牙轮钻机载工控机完成,实现对牙轮钻机安全,在不需要人工干预的情况下实现牙轮钻的精确自动对孔,最终自动对孔位置和钻孔设计位置误差达到厘米级。
附图说明
[0034]
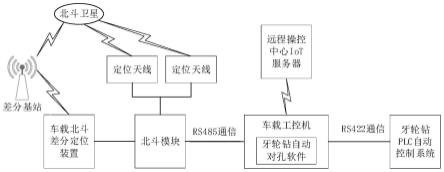
图1是本发明实施例的系统硬件构成图;
[0035]
图2是本发明的一种牙轮钻自动对孔方法的流程图;
[0036]
图3是本发明实施例的牙轮钻移动方向和距离示意图。
具体实施方式
[0037]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,以牙轮钻plc自动控制系统为三菱fx2n的情况下,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。
[0038]
如图1所示,本发明的一种牙轮钻自动对孔系统,包括牙轮钻plc自动控制系统,其特征在于,包括车载工控机、北斗模块、车载北斗差分定位装置、远程操控中心iot服务器、差分基站和牙轮钻自动对孔软件;
[0039]
所述车载工控机安装在牙轮钻驾驶室,用于完成向操作人员反馈信息、获取实时位置数据、计算与目标位置的偏差、与远程操控中心iot服务器进行数据交换、下发指令给牙轮钻plc自动控制系统的功能;
[0040]
所述北斗模块安装在牙轮钻上,通过此模块获取的实时位置数据结合车载工控机计算得到精确的钻头位置;
[0041]
所述车载北斗差分定位装置通过差分基站和北斗卫星使北斗模块获得更高精度的钻头实时位置数据;
[0042]
所述远程操控中心iot服务器布设在远程操控中心,完成下发钻孔设计位置数据的功能;
[0043]
所述差分基站布设在牙轮钻机无线通讯范围内,通过无线方式发送数据车载北斗差分定位装置;
[0044]
所述牙轮钻自动对孔软件安装在车载工控机中,用于根据获取的钻孔位置数据、北斗坐标和地理坐标系、通过牙轮钻车载工控机控制指令下发,实现对牙轮钻机安全、稳定的无人干预自动对孔。
[0045]
如图2是一种牙轮钻自动对孔方法,其特征在于,采用上述的牙轮钻自动对孔系统,按照以下步骤完成牙轮钻自动对孔:
[0046]
步骤一、牙轮钻自动对孔软件利用无线传输方式从远程操控中心iot服务器获得钻孔设计位置数据;
[0047]
所述步骤一中的无线传输方式包括4g/5g/数传电台方式;传输协议采用物联网mqtt协议;远程服务器部署有物联网iot平台,获取的爆破设计钻孔位置数据为bj-54地理坐标系格式,北斗芯片获取的经纬度为wgs-84地理坐标系,需要在工控机利用三参数转换模型完成bj-54地理坐标系跟wgs-84地理坐标系的转换,利用三参数转换模型转换为wgs-84地理坐标系格式,得到钻孔坐标(xd,yd),xd指钻孔设计位置的x坐标,yd指钻孔设计位置的y坐标,
[0048]
三参数转换模型:
[0049][0050]
具体实现步骤如下:
[0051]
1)将两个坐标系bj-54地理坐标系和wgs-84地理坐标系的坐标都转为直角坐标;
[0052]
2)按所采用的三参数转换方法求解出转换参数;
[0053]
3)根据所求参数进行坐标转换;
[0054]
4)根据需要,将直角坐标再转为大地坐标。
[0055]
表1为本发明实施例的mqtt协议参数设定。
[0056][0057][0058]
如表1所示,mqtt协议参数设定包括mqtt服务器ip地址的设定;mqtt服务器端口的设定;客户端id的设定;用户名的设定;密码的设定;qos参数设定;keepalive参数设定;clean session参数设定;数据发布主题的设定;数据发布周期的设定;订阅主题的设定。
[0059]
步骤二、牙轮钻自动对孔软件获取车载北斗模块的钻头实时位置数据;
[0060]
所述步骤二中,车载北斗模块安装有两根定位天线,能够同时获取两根天线安装
部位的位置坐标,天线的安装部位与钻头形成等腰三角形,以钻头为等腰三角形顶点,再结合两根天线安装部位和钻头的相对位置关系,利用三角函数可以得到钻头的实时位置,钻头坐标设为(xr,yr),xr指钻头实时位置的x坐标,yr指钻头实时位置的y坐标。
[0061]
步骤三、车载工控机计算钻孔设计位置数据和钻头实时位置数据两者之间的偏差;
[0062]
所述步骤三中,计算钻孔设计位置数据和钻头实时位置数据两者之间的偏差:
[0063]
步骤四、判断偏差是否大于设定值,如果“是”则进行步骤五,如果“否”则对孔完成,结束操作;
[0064]
步骤四中,判断偏差是否大于设定值是根据计算得到的钻孔设计位置数据和钻头实时位置数据两者之间的偏差dj与设定允许误差ds相比较,当dj》ds则执行步骤五;否则认为对孔完成,结束对孔操作。
[0065]
步骤五、牙轮钻自动对孔软件根据钻孔设计位置数据和钻头实时位置数据计算牙轮钻的移动方式和距离,生成控制信号;
[0066]
所述步骤五中,牙轮钻自动对孔软件根据钻孔设计位置数据和钻头实时位置数据计算牙轮钻的移动方式和距离,生成控制信号是根据钻孔设计位置数据和钻头实时位置数据,构建一个平面直角坐标系,以钻头位置为原点,以垂直于天线的安装部位与钻头形成等腰三角形底边为y轴,如图3所示,可以得到八种牙轮钻的移动方式,分别是垂直向上、垂直向下、向左、向右、先上后右、先上后左、先下后左,先下后右。
[0067]
向上移动的距离为(y
d-yr),发送前进指令,移动时间根据牙轮钻机的移动速度v,可以都得到t
上
=(y
d-yr)/v。向上移动完成后,将牙轮钻机右侧闸制动,发送前进指令,指令执行时间需要根据实际情况测定,然后完成右转90度,将右侧闸打开。右转完成后,再次发送前进指令,向右移动距离为(x
d-xr),移动时间为t
右
=(x
d-xr)/v,完成本次定位过程,然后判断是否满足误差要求,决定是否继续移动或者是完成整个定位过程。
[0068]
步骤六、牙轮钻自动对软件进行协议转换将控制信号转换为对应牙轮钻plc自动控制系统通讯协议的数据包,并通过通讯接口发送至牙轮钻plc自动控制系统,以使牙轮钻plc自动控制系统执行控制信号移动牙轮钻位置,移动完成后,返回执行步骤二,直到钻孔设计位置和钻头实时位置的偏差满足要求,完成对牙轮钻的自动对孔控制。
[0069]
步骤六中,将控制信号转换为对应牙轮钻plc自动控制系统通讯协议的数据包时,包括主流plc系列有:三菱fx plc系列、三菱q plc系列、ab plc系列、ge plc系列、欧姆龙plc系列或西门子s7 200、s7 300、s7 400、s7 1200、s7 1500plc系列;本发明的牙轮钻plc自动控制系统采用三菱fx2n plc系列,根据牙轮钻机移动速度和需要移动的距离,计算出移动的时间;牙轮钻机需要拐90度弯的时候,将左侧的闸制动,发送前进指令则完成左拐;同理,将右侧的闸制动,发送前进指令则完成右拐。
[0070]
表2为本发明实施例的连接三菱plc变量的设定
[0071]
序号名称(英文)描述(中文)数据类型1forward牙轮钻前进bool2backward牙轮钻后退bool
3leftbrakeopen左侧闸制动bool4leftbrakeclose左侧闸打开bool5rightbrakeopen右侧闸制动bool6rightbrakeclose右侧闸打开bool
[0072]
如表2所示,连接三菱plc的变量主要包括牙轮钻前进/后退、左侧闸制动/打开、右侧闸制动/打开等。每个变量设定数据类型为布尔。
[0073]
此外,需要说明的是,本发明实施例还包括设置在牙轮钻机驾驶室内的智能终端显示器,智能终端显示器由液晶屏和触摸屏组成,液晶屏用来显示指令和与牙轮钻机相关的信息界面,用于设置允许的位置误差和查看实时位置数据反馈,触摸屏是牙轮钻机自动布孔系统的执行者。
[0074]
最后需要说明的是,以上所述是本发明优选实施方式,应当指出,尽管已描述了本发明优选实施例,但对于本技术领域的技术人员来说,一旦得知了本发明的基本创造性概念,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明实施例范围的所有变更和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1