可实现多倍帧频成像的高速工业相机系统及其成像方法
1.本发明涉及一种高速工业相机系统及其成像方法,具体涉及一种使用多cmos探测器协同工作的可实现多倍帧频成像的高速工业相机系统及其成像方法。
背景技术:
2.高速工业相机目前广泛应用于工业检测、机器视觉、科学研究等领域。目前常用的cmos探测器的输出帧频都在100fps至1000fps。在一些需要记录物体高速运动的场景,例如检测爆炸和震动、观察瞬时物理现象等场景,需要使用每秒输出帧频数千到数万帧的高帧频工业相机才能完成任务。
3.目前满足需求的高速工业相机通常采用单个高速cmos探测器,这种cmos探测器存在价格昂贵、对相机本体的结构设计要求高的缺点。
技术实现要素:
4.本发明的目的是解决现有高速工业相机采用单个高速cmos探测器,导致其价格昂贵、对相机本体的结构设计要求很高的问题,提供一种利用多cmos探测器协同工作的可实现多倍帧频成像的高速工业相机系统及其成像方法。
5.为实现上述发明目的,本发明所提供的技术解决方案是:
6.一种可实现多倍帧频成像的高速工业相机系统,包括cmos探测器、图像采集设备、串行通信接口、输出接口,其特殊之处在于:
7.还包括fpga芯片,以及m个半透半反光学组件,m=2
x-1,x为大于等于1的整数;m个所述半透半反光学组件将入射光分成n束等效光;所述cmos探测器的数量为n个,n=2
x
,x为大于等于1的整数;所述输出接口的数量为n个;n个所述cmos探测器用于分别接收n束等效光;n个所述cmos探测器的输出端分别与fpga芯片相连接;所述fpga芯片分别通过n个输出接口与图像采集设备相连接,fpga芯片用于产生n路触发信号分别控制n个cmos探测器工作,接收cmos探测器输出的图像数据,并将图像数据发送至图像采集设备;所述n路触发信号中相邻两路触发信号的相位差为360
°
/n;所述串行通信接口与fpga芯片相连接,用于连接外部外部给定需要输出的帧频周期t。
8.进一步地,m个半透半反光学组件和n个cmos探测器按以下方式设置:
9.第1个半透半反光学组件设置在入射光路上,其透射光路和反射光路上分别设置一个半透半反光学组件,依此类推,并在最后的n/2个半透半反光学组件的透射光路和反射光路上分别设置一个cmos探测器。
10.进一步地,m=3。半透半反光学组件的数量不宜过多或过少,当m=3时最优,既保证了成像质量,又能够胜任对高速运动物体的拍摄任务。
11.同时,本发明还提供了上述可实现多倍帧频成像的高速工业相机系统的成像方法,其特殊之处在于,包括以下步骤:
12.[1]从被测物体发出的光线通过m个半透半反光学组件,被分成n束等效光,n=2
x
,
x为大于等于1的整数;
[0013]
[2]利用n路触发信号分别控制n个cmos探测器(2)接收对应的n束等效光并生成图像数据;相邻两路触发信号的相位差为360
°
/n;fpga芯片接收到需要输出的帧频周期t;产生n路触发信号,触发信号与cmos探测器是一一对应的;编号相邻的两个探测器之间的工作周期间隔为t
out
/n,其中t
out
为每个cmos探测器的帧频周期;
[0014]
[3]对生成的图像依次进行格式整理、存储和排序,得到n倍帧频的成像;fpga芯片对n个cmos探测器输出的图像数据进行格式整理,然后通过对应的输出接口将图像数据输出给图像采集设备;图像采集设备分别接收到n个cmos探测器输出的图像数据并进行存储,将所述n路图像按照生成的先后顺序依次循环进行保存和使用,利用所述关系式f=n
·fout
,就可以得到相机的输出帧频f;
[0015]
进一步地,步骤[2]具体为,fpga芯片根据需要输出的帧频周期t产生n路触发信号,n路触发信号经过处理后产生n路驱动信号,分别驱动n个cmos探测器接收对应的n束等效光,并生成图像数据;所述n路触发信号的上升沿是有效驱动信号,且相邻两路触发信号之间的相位差是360
°
/n,cmos探测器的帧频f
out
、需要输出的帧频周期t、需要输出的帧频f的对应关系式为t=1/(n
·fout
);
[0016]
进一步地,所述相邻两个cmos探测器的工作周期间隔t和每个探测器的帧频周期t的对应关系式为t=t
out
/n;
[0017]
进一步地,步骤[2]中,所述需要输出的帧频周期t具体为:
[0018]
fpga芯片通过串行通信接口接收外部给定的需要输出的帧频周期t;或者,fpga芯片没有接收到外部给定的需要输出的帧频周期,则需要输出的帧频周期t为系统默认帧频周期。
[0019]
进一步地,步骤[2]中,在n个cmos探测器工作的同时,fpga芯片通过串行通信接口接收和更新需要输出的帧频周期t。令fpga芯片生成的n个触发信号的时序先后依次循环为第一触发信号、第二触发信号、第三触发信号
……
第n触发信号、第一触发信号。在接收到新的需要输出的帧频周期t
′
时,fpga芯片会在生成需要输出的帧频周期为t的第n触发信号之后,生成新的帧频周期为t
′
的第一触发信号,使n个cmos探测器中相邻两个探测器的工作周期间隔t和每个探测器的帧频周期t
out
的对应关系式始终为t=t
out
/n。
[0020]
与现有技术相比,本发明的有益效果是:
[0021]
1.本发明提供的可实现多倍帧频成像的高速工业相机,使用了n个普通的cmos探测器,相比于单个高速cmos探测器,成本较低。
[0022]
2.本发明提供的可实现多倍帧频成像的高速工业相机,使用了m个半透半反光学组件,使不同帧的图像来自同一视场,无需进行额外的图像校正。
[0023]
3.本发明中n个cmos探测器接收到的光能量近似相等,在相同的曝光时间下得到的图像的灰度基本相同,使得图像的合成效果好。
[0024]
4.当半透半反光学组件数量m为3时,相机的帧频提高至原帧频的4倍,可以胜任对高速运动物体的拍摄任务,同时成像质量几乎不受影响。
附图说明
[0025]
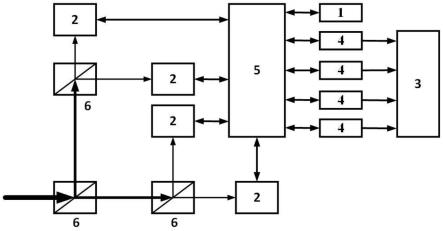
图1为本发明在半透半反光学组件数量m为3时的高速工业相机系统组成示意图。
[0026]
其中1-串行通信接口、2-cmos探测器、3-图像采集设备、4-输出接口、5-fpga芯片、6-半透半反光学组件。
[0027]
图2为本发明的触发信号之间时序关系示意图。
具体实施方式
[0028]
下面结合附图和具体实施例对本发明作进一步地说明。
[0029]
本发明提供了一种使用多cmos探测器协同工作的可实现多倍帧频成像的高速工业相机系统及其成像方法,这种高速工业相机具有成本较低的特点,并且可以胜任对高速运动物体的拍摄任务;解决了采用单个高速cmos探测器导致的价格昂贵、对相机本体的结构设计的缺点。
[0030]
本发明提供一种可实现多倍帧频成像的高速工业相机系统,包括串行通信接口1、n个cmos探测器2、图像采集设备3、n个输出接口4、fpga芯片5以及m个半透半反光学组件6,其中,m=2
x-1,n=2
x
,x为大于等于1的整数。
[0031]
m个所述半透半反光学组件6将入射光分成n束等效光,n个所述cmos探测器2用于分别接收n束等效光,fpga芯片5用于产生n路触发信号分别控制n个cmos探测器2工作,接收cmos探测器2输出的图像数据,并将图像数据发送至图像采集设备3,其中,相邻两路触发信号的相位差为360
°
/n;fpga芯片5通过串行通信接口1连接外部给定需要输出的帧频周期t。
[0032]
如图1所示,为本发明的一个实施例,包括串行通信接口1、cmos探测器2、图像采集设备3、输出接口4;特别地,还包括fpga芯片5和半透半反光学组件6;所述半透半反光学组件6的数量为三个;所述cmos探测器2的数量为四个;三个所述半透半反光学组件6将入射光分成四束等效光;所述输出接口4的数量为四个;四个所述cmos探测器2用于分别接收四束等效光;四个所述cmos探测器2的输出端分别与fpga芯片5相连接;所述fpga芯片5分别通过四个输出接口4与图像采集设备3相连接;所述串行通信接口1与fpga芯片5相连接,串行通信接口1用于连接外部给定需要输出的帧频周期t。本实施例中的四个cmos探测器2的帧频f
out
均为1000fps。三个半透半反光学组件6和四个cmos探测器2按以下方式设置:第一个半透半反光学组件6设置在入射光路上,其透射光路和反射光路上分别设置一个半透半反光学组件6,并在最后的两个半透半反光学组件6的透射光路和反射光路上分别设置一个cmos探测器2。
[0033]
本实施例采用三个半透半反光学组件6,即m=3。(1)当m=1时,相机的帧频增加量有限,对于记录一些物体高速运动的场景表现不理想;(2)当m≥5时,由于使用m个半透半反光学组件6时存在光能量的损失,故在光线不足的情况下成像质量会受到影响,例如图像不清晰或图像亮度不足;综合(1)(2)两种情况,半透半反光学组件6的数量不宜过多或过少,当m=3时最优,既保证了成像质量,又能够胜任对高速运动物体的拍摄任务。
[0034]
本实施例还提供了上述可实现多倍帧频成像的高速工业相机系统的成像方法,包括以下步骤:
[0035]
[1]从被测物体发出的光线通过三个半透半反光学组件6,被分成四束等效光;
[0036]
[2]cmos探测器2接收并生成图像;
[0037]
[2.1]启动整个系统,fpga芯片5通过串行通信接口1接收外部给定需要输出的帧频周期t,当没有外部给定需要输出的帧频周期输入时,系统输出默认的需要输出的帧频周
期t。由每个cmos探测器2的帧频周期t
out
和每个cmos探测器2的帧频f
out
的对应关系式t
out
=1/f
out
,可知,每个cmos探测器2的帧频周期t
out
值为
[0038]
[2.2]fpga芯片5根据需要输出的帧频周期t,产生四路触发信号,相邻两路触发信号之间的相位差是360
°
/4=90
°
;对四路触发信号按照工作时序先后依次命名为第一触发信号、第二触发信号、第三触发信号、第四触发信号;对四个cmos探测器2分别命名为第一探测器、第二探测器、第三探测器、第四探测器;触发信号与探测器的对应关系为:第一触发信号对应第一探测器,第二触发信号对应第二探测器,第三触发信号对应第三探测器,第四触发信号对应第四探测器;
[0039]
[2.3]fpga芯片5根据四路触发信号的上升沿,产生对应cmos探测器2的驱动信号,使得相邻的两个cmos探测器2之间的工作周期间隔为即第一探测器与第二探测器、第二探测器与第三探测器、第三探测器与第四探测器、第四探测器与第一探测器之间的工作间隔均为所述四路触发信号的上升沿是有效驱动信号,如图2所示;
[0040]
[2.4]四个cmos探测器2工作的同时,fpga芯片5通过串行通信接口1接收和更新需要输出的帧频周期t;特别地,令fpga芯片生成的四个触发信号的时序先后依次循环为第一触发信号、第二触发信号、第三触发信号、第四触发信号、第一触发信号;接收到新的需要输出的帧频周期t
′
时,fpga芯片5会在生成需要输出的帧频周期为t的第四触发信号之后,生成新的帧频周期为的第一触发信号,使四个cmos探测器2中相邻两个cmos探测器2的工作周期间隔t和每个cmos探测器2的帧频周期t
out
的对应关系式始终为t=t
out
/n;若将新的需要输出的帧频周期t
′
直接反馈到生成的触发信号中,则可能会扰乱n个cmos探测器2中相邻两个cmos探测器之间的工作周期间隔t,无法使相机帧频成倍提高。
[0041]
[3]对生成的图像依次进行格式整理、存储和排序;
[0042]
[3.1]fpga芯片5对4个cmos探测器2输出的图像数据进行格式整理,然后通过对应的输出接口4将图像数据输出给图像采集设备3。对四个输出接口4分别命名为第一输出接口、第二输出接口、第三输出接口、第四输出接口。四个cmos探测器2与四个输出接口4之间的对应关系为:第一探测器对应第一输出接口,第二探测器对应第二输出接口,第三探测器对应第三输出接口,第四探测器对应第四输出接口;
[0043]
[3.2]图像采集设备3分别接收到四个cmos探测器2输出的图像数据并进行存储。对四路生成的图像分别命名为第一图像、第二图像、第三图像、第四图像,四路图像与四个cmos探测器2之间的对应关系为:第一探测器对应第一图像,第二探测器对应第二图像,第三探测器对应第三图像,第四探测器对应第四图像。将所述四路图像按照如下顺序依次循环进行保存和使用:第一图像、第二图像、第三图像,第四图像、第一图像。利用所述关系式f=n
·fout
,就可以得到相机的输出帧频f,其值为f=(4
·
1000)fps=4000fps。
[0044]
本发明实施例提供的可实现多倍帧频成像的高速工业相机,使用了四个普通的cmos探测器2,相比于单个高速cmos探测器,成本较低;相机使用了三个半透半反光学组件6,使不同帧的图像来自同一视场,无需进行额外的图像校正;四个cmos探测器2接收到的光能量近似相等,在相同的曝光时间下得到的图像的灰度基本相同,使得图像的合成效果好;采用本发明实施例中的相机帧频提高至原帧频的四倍,可以胜任对高速运动物体的拍摄任
务,同时成像质量几乎不受影响。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1