一种基于射线追踪的无人机山地太赫兹信道建模方法
1.本发明涉及一种基于射线追踪的无人机山地太赫兹信道建模方法,属于太赫兹通信技术领域。
背景技术:
2.近年来,无人机凭其成本低和灵活性高等特点使其在无线通信领域应用范围较广。在一些应急和辅助山地通信场景中,利用无人机作为空中基站,可以快速灵活地建立无线通信网络,从而确保信息进行可靠传输。
3.太赫兹波具有频率高、波束窄、带宽大、信道容量大等优点。太赫兹信道建模主要分为以下三种方法:确定性信道建模,半确定性信道建模,随机性信道建模。本发明运用的是确定性信道建模,首先建立3d确定性无人机山地模型,根据具体的地形,材料特性,大气环境等,然后在合适的位置放置发射器,接收器,最后预测信道的传输模型。确定性信道模型的建立方法有射线追踪算法和时域有限差分法,本发明主要基于射线追踪算法的建模。应用确定性信道建模的射线追踪法可以精确预测信道特征参数如传播路径损耗、时延等。
4.然而,目前关于太赫兹信道的研究,大多数集中于室内无线信道传输和室外短距离通信,对太赫兹频段室外山地无线通信场景尚未做深入分析。现有关于太赫兹室外通信信道的研究,通常集中分析小区或城市场景的信道特性,对山区或者郊外等应急通信场景的研究较少,频段也主要集中在微波和毫米波,对太赫兹频段的研究不够深入,同时实验数据也不够充足。
技术实现要素:
5.本发明要解决的技术问题是提供一种基于射线追踪的无人机山地太赫兹信道建模方法,用以解决上述问题。
6.本发明的技术方案是:一种基于射线追踪的无人机山地太赫兹信道建模方法,具体步骤为:
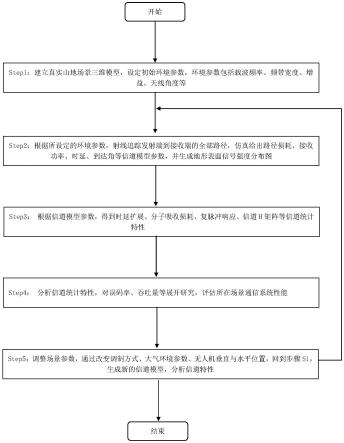
7.step1:建立真实山地场景三维模型,设定初始环境参数,所述环境参数包括载波频率、收发距离、发射功率、频带宽度、天线角度等;
8.step2:根据所设定的环境参数,射线追踪发射端到接收端的全部路径,仿真给出路径损耗、接收功率、时延、到达角等信道模型参数,并生成用户终端所在地形区域信号强度分布图;
9.step3:根据信道模型参数,得到时延扩展、分子吸收损耗、复脉冲响应、信道h矩阵等信道统计特性;
10.step4:分析信道统计特性,对误码率、吞吐量等展开研究,评估所在场景通信系统性能;
11.step5:调整场景参数,通过改变调制方式、大气环境参数、无人机垂直与水平位置,回到步骤s1,生成新的信道模型,分析信道特性;
12.可选的,所述室外山地场景及场景参数包括地形尺寸、发射机和接收机以及无人机的位置分布、太赫兹波频率。
13.可选的,所述建立山地三维模型,通过从usgs等遥感数据网站下载实际山地场景的数字高程数据(dem),再使用相应gis软件进行编辑或撷取等后处理工作。场景初始参数包括太赫兹波中心频率、频带宽度、天线参数、发射机和接收机以及无人机的位置分布等。对于发射点、接收点,需要配置相应的载波波形和天线,无人机悬浮于地面一定高度作为空中基站,用户终端作为接收点以一定间隔距离附着在起伏的地形表面进行仿真计算,射线追踪所有发射端到接收端的传播路径,得到每条传播信道的信道参数。
14.可选的,接收功率在具有天线模式的自由空间中,表达方式为:
[0015][0016]
式中,p
t
为时间平均辐射功率,θd和φd给出了射线离开发射机的方向,θa和φa给出了射线到达接收机的方向,r表示发射机到接收机之间的距离。以dbm为单位的接受功率由下式表示:
[0017]
pr(dbm)=10log
10
[pr(w)]+30eb-ls(db)
[0018]
可选的,所述路径损耗就是从发射端到接收端之间传播时能量功率的损耗。当收发天线不是理想的各向同性天线,有各自的增益,发射天线的增益为g
t
,接收天线的增益为gr,路径损耗为:
[0019]
l
path
(db)
[0020]
=p
t
(dbm)-pr(dbm)+g
t,max
(dbi)+g
r,max
(dbi)-ls(db)
[0021]
式中,g
tmax
为发射天线的最大增益,g
rmax
为接收天线的最大增益,ls表示系统中所有其他损耗的总和,包括带宽重叠因子。对于定向天线,路径损耗取决于天线的方向,全向天线则只取决于频率和环境。一般在太赫兹通信中,通常使用定向天线来补偿高传播损耗。
[0022]
可选的,所述自由空间传播损耗是太赫兹在空气中传播时候的能量损耗,太赫兹在穿透介质时都会有损耗,则太赫兹自由空间损耗l
fs
可以表示为:
[0023][0024]
式中,g
t
是发射天线的增益,gr是接收天线的增益,r是发射机和接收机之间的距离。
[0025]
所述分子吸收损耗是大气中水汽和氧分子含量对太赫兹波引起的频率依赖性吸收效应,大气环境中的压强、温度和湿度直接影响着其大小,路径损耗和接收功率将根据光
线的传播距离、频率和大气条件进行计算,其大气中氧气和水汽对太赫兹波段的分子吸收损耗l
air
可以表示为:
[0026][0027]
式中,γ0为大气中氧气的衰减率,γw为水汽的衰减率,h0为干燥空气的有效高度,hw为水汽的有效高度,θ为通信仰角。
[0028]
可选的,所述冲击响应是发射信号为脉冲信号,经过多径传播,信道脉冲响应相当于在接收天线处各条路径的叠加:
[0029][0030]
可选的,所述功率时延谱描述信道在时延上的扩散,是表征多径衰落信道的重要参数。信道经过不同路径到达接收端的时间存在差异,造成时间上的扩散。功率时延谱pdp可表示为信道脉冲响应的平方:
[0031]
φ(τ)=|h(τ)|2=|h
los
(τ)|2+|h
sb
(τ)|2+|h
db
(τ)|2[0032]
可选的,所述信道时延扩展是由于多径的影响,到达时间在时域上扩散,平均时延μ
τ
和均方根时延扩展(rms)σ
τ
可以用来描述信道的时延扩展,可通过功率时延谱pdp计算,表示为:
[0033][0034]
式中,u
τ
为平均时延,σ
τ
为均方根时延扩展,φ(τ)为信道脉冲响应。
[0035]
可选的,所述误码率的计算是通过设置环境噪声的功率密度和信号带宽,求得信噪比(sinr),进一步用于误码率(ber)以及吞吐量的计算。误码率的计算方式是根据加性高斯白噪声(awgn)模型,awgn在不考虑信道的任何色散效应的情况下,应用awgn存在时的ber的表达式为:
[0036][0037]
式中,pr是接受功率,pi是干扰源的功率,n0是噪声源的功率。
[0038]
可选的,所述awgn分析支持的调制方式包括pam、qam、psk、dpsk、fsk、msk、qpsk等,调制方式往往也决定着通信系统的性能,在qpsk调制和awgn信道的情况下,误码率的计算方式为:
[0039][0040]
可选的,所述吞吐量的计算是在射线追踪电磁波从发射机到接收机的传播路径后,得到接收机的输出功率,对于场景中每个接收机的位置,分析提供最高sinr的发射机,每个系统将根据无线通信接入方法选择调制和编码方案(mcs),所选择的mcs也直接关系着
信道的吞吐量大小。由于所给几种通信协议的信号带宽最高只有160mhz,在本发明中使用的是自己定义的通信协议,信号带宽为10ghz。
[0041]
可选的,所述吞吐量的分析,当通信系统中包含使用mimo天线的tx/rx时可以进行基于通信协议和运用波束赋形等技术的吞吐量分析。波束赋形中使用mrt技术,基于通道矩阵计算权重,产生最佳化的波束,让接收端有最理想的接收功率,在一个多径效应影响明显的环境,则可能会产生多个瓣而不是指向单一方向的波束,如果接收端也是天线阵列,则会针对接收端天线阵列第一个天线单元做最佳化,再通过接收端的天线分集技术,运用其他天线单元来优化增益。
[0042]
可选的,所述生成信道特性,通过调整场景的基础参数,改变调制方式,调制方式具体可以设置为pam、qam、psk、dpsk、fsk、msk,研究在视距情况下对信道路径损耗、信道容量、误码率等的影响。改变大气环境中温度、湿度、压强的数值,一方面可以从单个环境参数角度进行分析,另一方面可以整体模拟高原山地环境天气条件,分析高原山地环境对太赫兹波传播的影响。调整无人机在垂直与水平方向的位置,可以研究无人机位置变化对信道的影响,找到使用户终端通信性能最佳的无人机位置点,随着场景参数的变化,生成新的信道模型,分析对太赫兹波信道传播特性的影响。
[0043]
本发明的有益效果是:本发明可以获取太赫兹波在发射端到接收端传播过程中的所有传播路径、天线角度、接收功率等信息,得出了太赫兹山地通信的路径损耗、接收功率、时延扩展等信道建模所需的信道模型参数。根据所仿真输出的信道h矩阵、复脉冲响应等分析误码率和信道容量等通信系统性能。更为重要的是在已经形成的完整的太赫兹山地信道建模的基础上,再次改变模型变量,研究了高原山地环境、调制方式、无人机位置对信道特性的影响,能够通过信道模型参数的调整适用于多频段与多场景,通用性较好,所导入的场景模型都是实际山地地形,对一些多山地的高原地区具有一定的实用性,并且复杂度低容易实现,在太赫兹频段室外山地通信系统设计方面具有指导意义。
附图说明
[0044]
图1是本发明的无人机山地太赫兹通信信道建模方法的流程示意图;
[0045]
图2是本发明的无人机山地三维场景模型仿真图;
[0046]
图3是本发明的固定无人机对特定山地区域的接收功率三维图;
[0047]
图4是本发明的固定无人机对特定山地区域的标准大气环境和高原山地环境接收功率对比图;
[0048]
图5本发明的是固定无人机对特定山地区域的标准大气压环境和高原山地环境误码率对比图;
[0049]
图6是本发明的固定无人机对特定山地区域的信道容量数据图;
[0050]
图7是本发明的不同高度无人机在特定轨迹飞行时对终端的路径损耗数据图;
[0051]
图8是本发明的不同高度无人机在特定轨迹飞行时对终端的误码率数据图;
[0052]
图9是本发明的不同调制方式下误码率对比数据图。
具体实施方式
[0053]
下面结合附图和具体实施方式,对本发明作进一步说明。
[0054]
目前关于太赫兹信道的研究,大多数集中于室外短距离通信和室内无线信道传输,对于山地场景太赫兹信道在几何随机性信道建模方法中有所涉及,然而对太赫兹频段高原山地场景确定性建模尚未做深入分析;由于山地地形的起伏和植被覆盖等复杂情形,传统通信很难消除遮挡对信号带来的影响,而无人机在自由空间中灵活、三维移动,可以很容易地从一个地方移动到另一个地方,以提供按需通信支持,可以改变其位置以避免堵塞/阴影,并可以帮助数据中继/传输应用,帮助提高无线用户的体验质量,并支持在最需要的时间/地点第一响应人员的通信需求。无人机的使用对太赫兹通信有非常大的应用前景,以维持高吞吐量移动应用的数据速率需求。特别是,无人机可以通过悬停在一个有利的位置来保持与所需用户的视线(los)连接,这对于在太赫兹波段保持良好的链路质量至关重要。无人机的水平位置与高度位置对信道的影响是一个重点研究的问题。另外,还需考虑如大气分子吸收、自由空间传播损耗等带来的影响,调制方式的不同也会导致信道参数的变化,基于以上的综合考虑,本发明设计了一种基于无人机基站的山地太赫兹信道建模方法,建立了信道建模的系统流程,并仿真计算出了信道模型参数、信道统计特性、信道通信系统性能等一系列数据,根据三者之间复杂的非线性映射关系,分析信道模型的性能。最重要的是通过调整场景的参数,实现对多频段多模型的信道研究,体现了本发明的通用性较好。对未来无人机山地场景空-地太赫兹可靠通信的实现提出了相应的设计建议。
[0055]
本实施例所述方法包括建立真实山地场景三维模型、仿真获取信道模型参数、分析通信信道的统计特性和性能、更新场景参数生成新的信道模型等步骤。
[0056]
如图1所示,一种基于射线追踪的无人机山地太赫兹信道建模方法,具体步骤为:
[0057]
step1:依据山地三维地形以及场景参数建立仿真模型。
[0058]
作为示例,所述山地场景以及场景参数包括地形尺寸、山地表面材料、太赫兹波频率、天线角度等。其中,地形尺寸大概为5公里
×
5公里,地形最高高度约为300米,在导入地形时,将山地表面材料设置为岩石,各种材料都有确定的电导率和介电常数,也是影响电磁波传播的重要参数。载波频率设置成110ghz的太赫兹频段,按照设计流程完成建模仿真后,可以改变载波频率数值,对比不同太赫兹波段在山地场景信道传播的特性。天线有最大增益方向,需要将天线角度调整对准接收端方向,降低传播损耗。
[0059]
step2:确定太赫兹波发射器和接收器的位置,为研究用户终端处于山地特定区域的通信性能,无人机作为空中基站悬浮在山地一定高度处协助通信,用户接收器以一定间隔距离铺满特定区域,射线追踪所有发射器到接收器的视距路径,仿真给出路径损耗、接收功率、时延、到达角等信道模型参数,并生成地形区域表面信号强度分布图。另一种方式中,用户终端作为发射器放置在山地中,无人机作为接收器,在水平方向上以1米间隔距离形成一条100米的接收器直线路径。无人机的飞行速度设置为1m/s,在高度上依次调整为20m,30m,40m,50m,仿真出无人机在不同位置的信道特性。
[0060]
在本发明实施例中,由于是山地场景应急通信,且是太赫兹波传播,所以只考虑用户与无人机之间的短距离视距通信,确保无人机出现在合适的位置,与用户之间没有遮挡。仿真计算视距路径的相关信道参数。
[0061]
太赫兹在穿透任何介质的时候都会有损耗,则太赫兹自由空间损耗l
fs
可以表示为:
[0062][0063]
其中,g
t
是发射天线在接收机方向上的增益,gr是接收天线在发射机方向上的增益,r是发射机和接收机之间的距离。
[0064]
step3:根据所仿真出的信道模型参数,给出时延扩展、复脉冲响应、分子吸收损耗等信道特性数据,若发射端和接收端使用的天线是mimo阵列天线,可以导出信道h矩阵数据文件。
[0065]
mimo系统的信道矩阵,通常称为h矩阵,是一个定义发射机的天线元件和接收机中的天线元件之间的复杂信道增益的矩阵。它的维数为n
t
×
nr,其中n
t
为发射天线数,nr为接收天线数。矩阵中的每个值都是一个复数,它表示一对收发天线元件之间的信道增益的大小和相位。h矩阵有不同的定义,这取决于h矩阵如何归一化,以及每个元素是代表信道增益,还是信道增益的复共轭。在接收机处的信号被计算为:
[0066]
y=hx+n
[0067]
式中,x为包含传输信号的nt
×
1向量,y为包含接收信号的nr
×
1向量,n为噪声向量,h为复信道增益的n
t
×
nr矩阵,作为电压量。有时矩阵被简化为一维向量,用小写h指定。这用于假设单个天线在系统的一侧,或者当多个天线的贡献被组合时,例如在接收机分集技术的情况下,只考虑每个接收机元件的总数。
[0068]
分子吸收损耗是大气中水分子和氧分子对太赫兹波段特殊的吸收效应,使得大气在太赫兹波段的折射率成为一个负数折射率,其具体值由不同大气环境下的压强、温度和湿度决定,其大气中氧气和水汽对太赫兹波的分子吸收损耗l
ai
·r可以表示为:
[0069][0070]
其中,γ0为大气中氧气造成的衰减率,γw为水汽所造成的衰减率,h0为干燥空气的有效高度,hw为水汽的有效高度,θ为通信仰角。
[0071]
冲击响应是发射信号为δ(t)脉冲,经过多径传播,在接收天线处各条路径合成的信道脉冲响应为:
[0072][0073]
其中,n为多径数目,an表示多径传播衰减因子,τn为多径传播时延,为多径传播相位。
[0074]
在本发明实施例中,功率时延谱描述信道在时延上的扩散,是表征多径衰落信道的重要参数。信道经过不同路径到达接收端的时间存在差异,造成时间上的扩散。功率时延谱pdp可表示为信道脉冲响应的平方:
[0075]
φ(τ)=|h(τ)|2=|h
los
(τ)|2+|h
sb
(τ)|2+|h
db
(τ)|2[0076]
所述信道时延扩展是由于多径的影响,到达时间在时域上扩散,平均时延μ
τ
和均方根时延扩展(rms)σ
τ
可以用来描述信道的时延扩展,可通过功率时延谱pdp计算,表示为:
[0077][0078]
step4:分析信道统计特性,对误码率、吞吐量等展开研究,评估所在场景通信系统性能。
[0079]
在本发明实施例中,误码率的计算是通过设置环境噪声的功率密度和信号带宽,求得信噪比(sinr),进一步用于误码率(ber)以及吞吐量的计算。误码率的计算方式是根据加性高斯白噪声(awgn)模型,awgn在不考虑信道的任何色散效应的情况下,应用awgn存在时的ber的表达式为:
[0080][0081]
其中,pr是接受功率,pi是干扰源的功率,n0是噪声源的功率。
[0082]
awgn分析支持的调制方式包括pam、qam、psk、dpsk、fsk、msk、qpsk等,调制方式往往也决定着通信系统的性能,在qpsk调制和awgn信道的情况下,误码率的计算方式为:
[0083][0084]
step5:通过改变调制方式、大气环境参数、无人机垂直与水平位置,回到步骤s1,生成新的信道模型,分析信道特性。
[0085]
所述step5中,改变大气环境参数的设计方案为:改变大气环境中温度、湿度、压强的数值,一方面可以从单个环境参数角度进行分析,另一方面可以整体模拟高原环境天气条件,分析高原环境对太赫兹波传播的影响。本实施例中无人机基站作为发射机悬浮在地形上方40米处,用户接收机覆盖满一块边长为100米的正方形区域,每个接收机间隔距离为5米,共400个。从图3中可以看出铺满特定区域的接收器的接收功率在-65~-125dbm之间,符合手机终端接收功率的正常范围,将标准大气压环境和高原山地大气压环境下的接收功率、误码率进行对比,标准大气条件参数设置为:温度22℃,气压1013mbar,湿度50%;高原山地条件参数设置为:温度15℃,气压807mbar,湿度40%,仿真结果如图4和图5所示,从对比中可以看出高原山地环境下接收功率总体要大于标准大气压环境,原因是随着高原山地海拔高度的增加,大气压和湿度降低,大气中的氧气和水分子含量减少,分子吸收损耗下降,所以接收功率高于标准大气压环境。图5按照同样的分析,可以看出高原山地环境信道的误码率总体小于标准大气环境。图6为两种大气环境下的信道容量,范围在0-60gbit/s。
[0086]
所述step5中,无人机位置变化设计方案为:用户作为发射机,无人机作为接收机,以1米间隔距离形成一条100米的移动线路,无人机飞行速度为1m/s,再改变路径的高度,观察通信性能最佳的无人机的位置。仿真出信道路径损耗和误码率数据结果,如图7和图8所示,从图7可以看出当无人机开始沿路径慢慢接近用户时,路径损耗慢慢减小,在48-52米之间,无人机到达用户发射机正上方时,由于无人机基站携带的是半波偶极子天线,天线最大
增益沿x轴水平方向,此时的天线增益最小,数据图在此区间出现一个损耗变大的凸点,无人机继续向前移动,距离用户越来越远,路径损耗又慢慢增大。并且随着无人机高度的升高路径损耗也增加。图8显示出误码率与接收功率类似的趋势。值得注意的是在0-25米和75-100米区间,高度低的反而路径损耗和误码率较大,这是无人机在此区间天线高增益方向与用户天线对准角度的变化所导致。综上面结果分析,方便找出无人机与用户通信性能最佳的位置。
[0087]
所述step5中,改变调制方式的设计方案为:保持无人机的高度位置不变,无人机在20米高度处沿着水平路径飞行,调制方式分别设置为dpsk、pam、qam、psk、fsk、msk,如图9所示,在msk调制方式下,信道的误码率最小,通信性能最佳,fsk相对其他几种调制方式误码率较大。
[0088]
本实施所述方法主要包括建立真实山地场景三维模型、仿真获取信道模型参数、分析通信信道的统计特性和性能、更新场景参数生成新的信道模型等建模流程。应用到实际当中,设置频率可达到太赫兹频段,天线选择种类较多,还包括mimo阵列天线。通过仿真分析得到一些重要的信道模型参数,利用qpsk等不同调制方式下误码率理论分析的方法,可得到高原环境下接收系统的误码率与传输距离的关系曲线,随着传输距离的增加,误码率逐步增大;高原山地环境下,通信系统更加稳定可靠。
[0089]
本发明给出了分步骤信道参数的生成方法,可以根据实际情况进行配置,能够较好的模拟实际山地场景太赫兹通信信道的特征;所提建模方法涵盖了太赫兹信道建模的主要参数数据,并且能够改变场景参数进行动态可更新太赫兹信道的特性分析,对未来山地场景太赫兹实现可靠通信提出了相应的设计建议。
[0090]
以上结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1