一种自动化双悬臂吊边卡车牌校验系统及方法与流程
1.本发明涉及码头堆场技术,更具体地说,涉及一种自动化双悬臂吊边卡车牌校验系统及方法。
背景技术:
2.目前随着对外贸易量不断增长,如何提高港口自动化的效率是各大自动化码头不断追求的目标,u型堆场结构的提出可以极大提高收放箱的效率,集卡司机可以根据堆场闸口处提供的任务单号,行驶到相应的任务位置,轨道吊扫描到集卡编号并校验后完成相应的自动化任务,集卡司机完成任务后从u型堆场另一侧驶离堆场。
3.传统的堆场的端部交互,司机需要行驶到固定的车墩围起的车道,并且该u型堆场全程无需集卡司机下车操作,做到安全高效的自动化交互任务,但由于有驾驶司机的存在,司机个人水平及对堆场熟悉度的差距,会导致某些司机驶错堆场、停错贝位或者正在自动化任务期间司机驶离目标位置,这会导致轨道吊在收发箱的过程中无法准确定位到集装箱或者收发错误的集装箱,从而造成堆场任务出现混乱。
技术实现要素:
4.针对现有技术中存在的上述缺陷,本发明的目的是提供一种自动化双悬臂吊边卡车牌校验系统及方法,以实现集卡可以在u型堆场任意贝位进行停靠与双悬臂轨道吊进行任务交互。
5.为实现上述目的,本发明采用如下技术方案:
6.一方面,一种自动化双悬臂吊边卡车牌校验系统,包括:
7.rfid采集器,用以采集集卡的车牌信息;
8.armg主控制器,与所述rfid采集器进行数据交换;
9.指令系统,通过数据库与所述armg主控制器进行数据交换;
10.led显示屏,与所述armg主控制器建立通讯,用以显示所述armg主控制器与所述rfid采集器之间数据交换的情况;
11.hmi界面,与所述armg主控制器相连,用以显示报警信息。
12.较佳的,所述rfid采集器上设有两根rfid天线;
13.两根所述rfid天线分别位于距离双悬臂轨道吊中心位置的12.5m、15m位置上。
14.较佳的,所述armg主控制器选用cpe305系列的plc。
15.较佳的,所述数据库选用oracle数据库。
16.较佳的,所述armg主控制器与所述rfid采集器之间通过profinet协议进行数据交换;
17.所述armg主控制器与所述led显示屏通过profibus-dp协议建立通讯。
18.另一方面,一种自动化双悬臂吊边卡车牌校验方法,采用所述的自动化双悬臂吊边卡车牌校验系统实现以下作业流程:
19.当集卡先到达指令目标位置,双悬臂轨道吊后到达指令目标位置时,将所述双悬臂轨道吊的大车移动到指令目标位置,所述双悬臂轨道吊的小车移动到集卡车道旁的指定等待位置,所述rfid采集器采集到所述集卡的车牌信息,并将所述车牌信息以ascii码形式发送给所述armg主控制器,所述armg主控制器将从所述指令系统发来的车牌号与所述车牌信息进行校验,若相互匹配,则所述集卡正确,所述双悬臂轨道吊向所述armg主控制器发送结束交互命令,所述armg主控制器停止,所述双悬臂轨道吊的小车进入悬臂侧区域执行收发箱任务,通过所述led显示屏显示告知所述集卡的司机当前作业情况;若相互不匹配,则所述集卡不正确,通过所述led显示屏显示告知所述集卡的司机当前停错位置,让司机继续等待,所述双悬臂轨道吊向所述armg主控制器发送结束交互命令,同时所述armg主控制器向所述数据库中反馈当前错误的所述车牌信息,所述指令系统则重新向所述armg主控制器发送当前车牌号的指令,所述指令系统重新发送指令的抓箱位置不变,放箱位置则发生变化,所述双悬臂轨道吊收到新的指令则重新与所述armg主控制器进行交互校验,此时车牌号匹配继续执行自动化抓箱任务;
20.若所述双悬臂轨道吊先到达指令目标位置时,所述双悬臂轨道吊一直等待,待所述集卡行驶到位后,由所述rfid采集器采集到所述集卡的车牌信息,并发送给所述armg主控制器,由所述armg主控制器开始交互检验。
21.较佳的,若所述指令系统发出的车牌号为空号,或者所述rfid采集器未采集到所述集卡的车牌信息,则转入手动操作模式,并向所述hmi界面推送报警信息。
22.较佳的,若所述双悬臂轨道吊先到达指令目标位置后,在规定时间内所述集卡未到位,则转入手动操作模式,并终止当前指令。
23.本发明所提供的一种自动化双悬臂吊边卡车牌校验系统及方法,rfid具有远距离非接触式的读取数据能力,可以通过读取贴在集卡上标签,对静止或高速移动集卡进行快速识别采集信息,对于港口复杂及严苛的工作环境非常适用,plc作为自动化轨道吊的主控设备,可以实现高速与rfid采集系统的信息交换,并能通过逻辑算法实现对异常情况的及时反映,而数据库作为一个指令级的通讯媒介,可以及时存储更新集卡异常的指令,同时基于cimplicity的人机交互界面可以向操作人员及时反馈报警信息。
附图说明
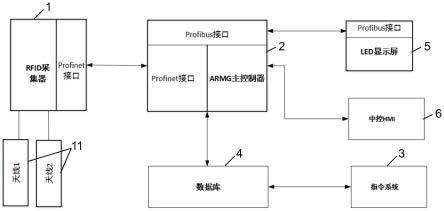
24.图1是本发明自动化双悬臂吊边卡车牌校验系统的框架示意图;
25.图2是本发明自动化双悬臂吊边卡车牌校验方法的流程示意图;
26.图3是本发明自动化双悬臂吊边卡车牌校验方法的算法流程示意图;
27.图4是u型堆场的边卡交互位置示意图;
28.图5是本发明自动化双悬臂吊边卡车牌校验系统中rfid天线的安装示意图。
具体实施方式
29.为了能更好地理解本发明的上述技术方案,下面结合附图和实施例进一步说明本发明的技术方案。
30.结合图1所示,本发明所提供的一种自动化双悬臂吊边卡车牌校验系统,包括:
31.rfid采集器1,用以采集集卡的车牌信息;
32.armg主控制器2,与rfid采集器1进行数据交换;
33.指令系统3,通过数据库4与armg主控制器2进行数据交换;
34.led显示屏5,与armg主控制器2建立通讯,用以显示armg主控制器2与rfid采集器1之间数据交换的情况;
35.hmi界面6,与armg主控制器2相连,用以显示报警信息。
36.作为u型堆场码头,集卡可以在集卡车道随停进行交互,准确读取到集卡车牌号是整个系统的第一步,本发明自动化双悬臂吊边卡车牌校验系统采用rfid采集器1作为集卡车牌的采集设备,并通过挑臂方式安装在双悬臂轨道吊上,由于rfid采集器1在作业20ft、40ft和45ft的集装箱时,rfid采集器1停止的位置不一样,为了保证集卡车牌号的准确读取,在rfid采集器1上分别装两根rfid天线11,分别安装在距离双悬臂轨道吊中心位置的12.5m及15m处,如图4和图5所示。
37.本发明自动化双悬臂吊边卡车牌校验系统选用cpe305系列plc作为armg主控制器2,并通过profinet协议与rfid采集器1进行数据交换,自定义一份数据交换格式(如ascii码),armg主控制器2发送给rfid采集器1的消息包含启停自动化双悬臂吊边卡车牌校验系统的标志位及启动天线11编号的命令,而rfid采集器1收到armg主控制器2的指令消息后,会启动工作并将采集到的集卡车牌号及时发送给armg主控制器2。同时选用led显示屏5安装在armg主控制器2上,并通过profibus-dp协议与armg主控制器2进行通讯,而armg主控制器2把当前与rfid采集器1交互出现的各种情况及时显示在led显示屏5上以告知集卡司机当前的作业情况。车牌号的校验是通过指令系统3下发的作业的车牌号和从rfid采集器1采集的车牌号进行校验的,所以本发明自动化双悬臂吊边卡车牌校验系统选用oracle数据库作为与指令系统3下发的车牌号交互的媒介,armg主控制器2也会通过数据库4将校验的结果反馈到指令系统3,以告诉指令系统3是否需要重新更新和取消当前作业指令。同时在armg主控制器2的主控程序中写入分类中断报警,通过现有的hmi界面6告知中控操作人员及时介入处理集卡司机无法处理的工况。
38.结合图2和图3所示,本发明还提供了一种自动化双悬臂吊边卡车牌校验方法,采用本发明自动化双悬臂吊边卡车牌校验系统实现以下作业流程:
39.当u型堆场有任务发生时,集卡司机和双悬臂轨道吊会同时接到指令到达指定位置作业,集卡和双悬臂轨道吊存在到达目的位置先后的顺序。
40.当集卡先到达指令目标位置,双悬臂轨道吊后到达指令目标位置时,由于下方有集卡和集卡司机的存在,为了安全考虑,将双悬臂轨道吊的大车移动到指令目标位置,双悬臂轨道吊的小车移动到集卡车道旁的一个指定等待位置(如图4所示),此时向本发明自动化双悬臂吊边卡车牌校验系统发送启动交互命令,本发明自动化双悬臂吊边卡车牌校验系统接收到交互命令,由rfid采集器1采集到集卡的车牌信息,并将车牌信息以ascii码形式发送给armg主控制器2,armg主控制器2将从指令系统3发来的车牌号与车牌信息进行一一校验,若相互匹配,则说明此时双悬臂轨道吊作业的集卡正确,双悬臂轨道吊向armg主控制器2发送结束交互命令,armg主控制器2停止,双悬臂轨道吊的小车进入悬臂侧区域执行收发箱任务,通过led显示屏5显示告知集卡的司机当前作业情况。若相互不匹配,则说明当前的集卡不是作业车辆,通过led显示屏5显示告知集卡的司机当前停错位置,让司机继续等待,双悬臂轨道吊向armg主控制器2发送结束交互命令,同时armg主控制器2向数据库4中反
馈当前错误的车牌信息,指令系统3当发现反馈的车牌号与自己发送的车牌号不一致,则重新向armg主控制器2发送带有当前车牌号的指令,指令系统3重新发送指令的抓箱位置不变,放箱位置则发生变化,双悬臂轨道吊收到新的指令则重新与armg主控制器2进行交互校验,此时车牌号匹配继续执行自动化抓箱任务。
41.若双悬臂轨道吊先到达指令目标位置时,双悬臂轨道吊一直等待,待集卡行驶到位后,由rfid采集器1采集到集卡的车牌信息,并发送给armg主控制器2,由armg主控制器2开始交互检验。
42.此时可能会产生异常情况,若指令系统3发出的车牌号为空号,或者rfid采集器1未采集到集卡的车牌信息,则转入手动操作模式,并向hmi界面推送报警信息,由人工介入通过摄像头判断是否需要手动抓放箱或者呼喊集卡司机驶离该位置。
43.若双悬臂轨道吊先到达指令目标位置后,此时一直处于等待状态,待集卡司机行驶到位后,再向自动化双悬臂吊边卡车牌校验系统发送交互命令,但由于有可能集卡司机一直没有找到正确的位置,此时双悬臂轨道吊不能一直等待下去,在规定时间内集卡未到位,则转入手动操作模式,并终止当前指令。
44.本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1