一种基于线性延拓的自适应信道估计方法与流程
1.本发明涉及移动通信技术领域,具体涉及一种基于线性延拓的自适应信道估计方法。
背景技术:
2.在移动通信中,接收机的位置在不断变化,同时由于通信环境的多样性,电磁波在遇到障碍物或电离层时会产生反射现象,当遇到表面不均匀的大型建筑时会产生漫反射现象。因此接收机会收到来自不同路径信号的叠加。多条路径的存在会导致码间串扰(intersymbol interference,isi),使通信系统的性能恶化,出现错误平层。
3.均衡是解决isi的有效方法,随着现代编译码(如turbo/ldpc码)迭代译码思想的提出,人们逐渐认识到采用迭代能够给通信系统带来额外的性能增益,于是提出了联合迭代译码的思想。由于联合迭代译码的运行机制与turbo码的译码机制十分类似,基于此也将联合迭代译码称为turbo均衡。
4.turbo均衡方案中要求接收机掌握信号所经路径的衰落大小,从而在迭代均衡的处理中更有效的进行相关数据处理。如果掌握(估计)的信道参数是完全错误的,则接收端不可能进行正常的均衡,也就无法建立可靠的通信链路;若估计出的信道参数与真实参数很接近,则接收机能够正常工作,仅仅是性能有所下降。显然估计的精确度直接影响了通信系统的最终性能。因此信道估计与跟踪是turbo均衡的重要模块,同时也是建立通信链路前的必要工作。
5.在现有的信道估计技术中,通常采用序列相关的方法,选择具有良好自相关特性的序列作为导频序列,从而对信道进行估计。但现有技术存在一些弊端:一是专有的估计序列不具有通用性;二是估计精度低,基于相关特性的信道估计算法完全是依靠自相关程度,在噪声很大的情况下无法精确估计信道参数。
技术实现要素:
6.针对现有技术中存在的问题,本发明的目的在于提供一种基于线性延拓的自适应信道估计方法。
7.为了达到上述目的,本发明采用以下技术方案予以实现。
8.一种基于线性延拓的自适应信道估计方法,包括以下步骤:
9.步骤1,将完整信道等长度划分为j段,每段长度为m;
10.步骤2,计算第j段信道的信道特性估计值;
11.步骤3,根据第j段信道的信道特性估计值计算第j+1段信道的信道特性估计值;
12.步骤4,重复步骤2~3,直至得到每段信道的信道特性估计值,即得到该完整信道的信道特性估计值。
13.与现有技术相比,本发明的有益效果为:本发明方法基于线性延拓对信道特性进行估计,具有估计精确度高、收敛快的优点,不需人工干预,能够实现对信道特性的实时估
计;本发明方法的实现方案简单易行,有利于工程实现。
附图说明
14.下面结合附图和具体实施例对本发明做进一步详细说明。
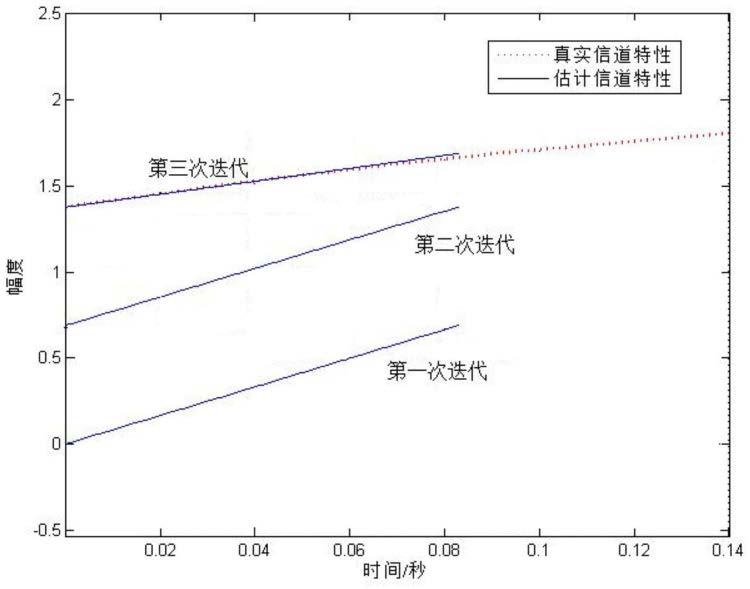
15.图1为本发明方法中信道特性估计值的迭代过程示意图;
16.图2为本发明方法中经迭代后的最终信道特性估计值示意图;
17.图3为使用本发明方法,在信噪比snr=30db(近乎无噪声)、m=20、最大迭代次数为50的情况下,信道特性真实值与信道特性估计值的对比图;
18.图4为使用本发明方法,在信噪比snr=0db(有噪声)、m=20、最大迭代次数为50的情况下,信道特性真实值与信道特性估计值的对比图;
19.图5为低通滤波器的频域特性图;
20.图6为经过低通滤波器平滑后的信道特性估计值与信道特性真实值的对比图。
具体实施方式
21.下面将结合实施例对本发明的实施方案进行详细描述,但是本领域的技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限制本发明的范围。
22.将完整信道等长度划分为j段,每段长度为m;则时变衰落信道的幅度随时间变化而变化的特性如下:
23.h=(h
0m+0
,
…
,h
0m+(m-1)
,
……
,h
jm+0
,
…
,h
jm+(m-1)
,
……
,h
(j-1)m+0
,
…
,h
(j-1)m+(m-1)
)
24.时变衰落信道共有jm个采样点,相邻两个采样点之间的时间间隔为δt,则第i个采样点对应的时刻为ti=iδt;定义信道瞬时幅度为hi,(0≤i<jm),传输的伪随机二进制训练序列为u=(u0,u1,
…
,ui,
…
,u
jm-1
),(ui∈{0,1})。
25.为了说明简单起见,采用二进制相移键控(binary phase shift key,bpsk)调制方式,伪随机二进制训练序列u经bpsk调制后得到映射符号x=(x0,x1,
…
,xi,
…
,x
jm-1
),其中,xi=1-2ui。
26.接收端收到的信号为其中,符号表示按位相乘操作,即w=(w0,w1,
…
,wi,
…
,w
jm-1
),wi为服从均值为0方差为σ2的正态分布采样值。
27.则第i个接收值的数学表达式为ri=hixi+wi,(0<=i<jm)。
28.信道估计与跟踪的目的就是利用接收值r与已知的训练序列x来估计h中每个元素的数值。
29.一种基于线性延拓的自适应信道估计方法,包括以下步骤:
30.步骤1,将完整信道等长度划分为j段,每段长度为m;
31.步骤2,计算第j段信道的信道特性估计值;
32.子步骤2.1,令第j段信道在其初始时刻t
jm+0
的特性估计值
33.子步骤2.2,设定k∈[k
min
,k
max
],令k=k
min
;
[0034]
子步骤2.3,建立信道特性估计值和时间的平面坐标系,过定点作斜
率为k的直线lk,得到第j段信道在各个时刻的信道特性估计值;第j段信道在第m个时刻t
jm+m
的信道特性估计值为:
[0035][0036]
式中,δt为相邻两个采样点之间的时间间隔;
[0037]
子步骤2.4,根据第j段信道在各个时刻的信道特性估计值和相应的调制符号构造第j段信道的无噪声模拟接收信号第j段信道的无噪声模拟接收信号如下式所示:
[0038][0039]
为了说明简单起见,采用二进制相移键控的调制方式,相应的调制符号为(x
jm+0
,x
jm+1
,
…
x
jm+m
,
…
x
jm+(m-1)
)。
[0040]
子步骤2.5,计算第j段信道的有噪声真实接收信号rj与无噪声模拟接收信号的差值
[0041]
第j段信道的有噪声真实接收信号rj表示如下:
[0042]rj
=(h
jm+0
x
jm+0
+w
jm+0
,
…
,h
jm+m
x
jm+m
+w
jm+m
,
…
,h
jm+(m-1)
x
jm+(m-1)
+w
jm+(m-1)
)
[0043]
式中,h
jm+m
为信道特性真实值,w
jm+m
为真实接收信号中的噪声;
[0044]
则差值表示如下:
[0045][0046]
式中,
[0047]
若基于直线lk所构造的信道与真实信道相同,即则所得差值应为叠加在信号上的噪声w
jm+m
;否则所得差值应为噪声与误差项的和。
[0048]
从统计特性上分析,单纯的噪声应该具有最小的方差,同时考虑到估计值应介于真实值附近,从而导致可能大于0也可能小于0。因此采用均方差来判断第j段构造出的信道是否与真实信道相拟合。
[0049]
子步骤2.6,计算差值的均方差
[0050][0051]
式中,var(
·
)表示求方差操作。
[0052]
子步骤2.6,更新斜率k=k+k
step
,重复子步骤2.3~2.6,直至k>k
max
;使用均方差最小对应的直线lk的斜率k计算得到第j段信道末端时刻的信道特性估计值完成一次迭代;
[0053]
子步骤2.7,令第j段信道在其初始时刻t
jm+0
的信道特性估计值等于子步骤
2.6得到的末端时刻信道特性估计值返回子步骤2.2;直至达到最大迭代次数;
[0054]
参考图1,经过多次迭代,信道特性估计值越来越接近真实值。
[0055]
子步骤2.8,根据在信道特性估计值和时间的平面坐标系中经过第一次迭代初始时刻的信道特性估计值和最后一次迭代最终时刻的信道特性估计值的直线的斜率,得到第j段信道在各个时刻的信道特性估计值,如图2所示。
[0056]
步骤3,根据第j段信道的信道特性估计值计算第j+1段信道的信道特性估计值;
[0057]
具体的,将第j段信道末端时刻信道特性估计值作为第j+1段信道在第一次迭代时其初始时刻的信道特性估计值。
[0058]
步骤4,重复步骤2~3,直至得到每段信道的信道特性估计值,即得到该完整信道的信道特性估计值。
[0059]
仿真试验结果
[0060]
参考图3,为在信噪比snr=30db(近乎无噪声)、m=20、最大迭代次数为50的情况下,信道特性真实值与信道特性估计值的对比图;
[0061]
参考图4,为在信噪比snr=0db(有噪声)、m=20、最大迭代次数为50的情况下,信道特性真实值与信道特性估计值的对比图;
[0062]
为了进一步提高基于线性延拓的自适应信道估计方法在低信噪比环境下估计的平滑性,可以进行低通滤波。实际通信环境下短波衰落信道的频谱一般呈现出高斯特性,其主要频谱分量不超过3σf=3αfd,取fd=1hz则主要频谱分量应在2.12hz范围内,因此选取低通滤波器的截止频率为2.5hz。参考图5,为低通滤波器的频域特性图。经过低通滤波器平滑后信道特性估计值如图6所示。由图6可以看到,低通滤波器能够滤除高频
‘
毛刺’,使得高于理论频谱的分量从原本不平滑的信道中剔除从而得到平滑的信道估计,同时也可以看出平滑后的信道特性估计值与信道特性真实值基本吻合。
[0063]
综上,说明本发明的基于线性延拓的自适应信道估计方法可以对信道特性进行准确的估计,且具有较快的收敛速度。
[0064]
虽然,本说明书中已经用一般性说明及具体实施方案对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1