监视终端的制作方法
1.本发明涉及监视终端。
背景技术:
2.在专利文献1所记载的提供饮料品配置服务的系统中,向服务器无线发送具有无线通信功能的冰箱的门的开关状态发生了变化的通知。服务器基于通知对冰箱内的饮料产品的库存进行管理。
3.具体而言,冰箱由冰箱主体和安装于冰箱主体的无线通信装置构成。冰箱具有门。无线通信装置检测由于门被关闭而在冰箱中产生的振动。无线通信装置被安装在能够高精度地检测振动的位置。具体而言,在检测到冰箱中产生的振动的情况下,无线通信装置安装于冰箱主体的侧面。
4.专利文献1:特开2019-109001号公报
5.但是,在专利文献1所记载的系统中,由于门重复的开闭,无线通信装置(监视终端)有可能从冰箱主体脱离,或从冰箱主体脱落。即,无线通信装置的安装状态可能发生异常。在该情况下,会误检测门的开关、或者无法检测门的开关。此外,由于某些原因,冰箱主体(电气设备)有可能倾斜。即,冰箱主体的设置状态有可能产生异常。
技术实现要素:
6.本发明是鉴于上述问题而完成的,其目的在于,提供如下的监视终端:在向电气设备的安装状态产生了异常的情况下、或者在电气设备的设置状态产生了异常的情况下,能够向用户通知,以使安装状态或设置状态恢复正常。
7.本发明的监视终端相对于电气设备装卸自如,监视所述电气设备的状态。监视终端具备检测部、通知部和判断部。检测部检测所述电气设备的振动。通知部根据所述检测部检测到的所述振动,通知表示所述电气设备的动作状态的动作信息。判断部根据所述检测部的检测结果,判断所述监视终端向所述电气设备的安装状态或所述电气设备的设置状态。
8.根据本发明,能够提供一种监视终端,该监视终端在向电气设备的安装状态发生异常的情况或电气设备的设置状态发生异常的情况下,能够对用户进行通知,以使安装状态或设置状态恢复正常。
附图说明
9.图1是表示本发明的实施方式所涉及的洗衣机系统的立体图。图2是表示本实施方式的监视系统的框图。图3是示意性表示配置有本实施方式所涉及的监视终端的洗衣机的前表面侧的立体图。图4是示意性表示配置有本实施方式所涉及的监视终端的洗衣机的后表面侧的立
体图。图5是示意性表示本实施方式涉及的监视终端的立体图。图6是示意性表示本实施方式涉及的洗衣机系统的立体图。图7是表示利用本实施方式涉及的监视终端的监视方法的流程图。图8是表示在本实施方式所涉及的监视终端的安装状态和洗衣机的设置状态为正常的情况下基于检测部的检测结果计算出的加速度的时间变化的一例的图。图9是表示在本实施方式所涉及的监视终端的安装状态或洗衣机的设置状态为异常的情况下基于检测部的检测结果计算出的加速度的时间变化的一例的图。图10是表示通过本实施方式涉及的监视终端通知的水准仪图像的一例的图。图11是表示在利用本实施方式涉及的监视终端的监视方法中,用于判断监视终端的安装状态或洗衣机的设置状态的处理的流程图。图12是表示本实施方式涉及的监视终端的一例的立体图。图13是表示本实施方式涉及的监视终端的一例的分解立体图。图14a是示意性表示本实施方式的第一变形例涉及的洗衣机系统的局部立体图。图14b是示意性表示本实施方式的第二变形例涉及的洗衣机系统的局部立体图。图15是表示本实施方式的第三变形例涉及的洗衣机系统的立体图。图16是表示利用本实施方式的第四变形例涉及的监视终端的监视方法的流程图。
具体实施方式
10.以下,参照附图说明本发明的实施方式。此外,对图中相同或相当的部分标注同一附图标记,并且不重复其说明。
11.图1至图13对本发明的实施方式所涉及的监视终端200进行说明。图1是表示本实施方式涉及的洗衣机系统300的立体图。如图1所示,洗衣机系统300具备洗衣机100和监视终端200。洗衣机100相当于本发明的“电气设备”的一个例子。
12.监视终端200配置于洗衣机100。即,监视终端200安装于洗衣机100。监视终端200相对于洗衣机100装卸自如。监视终端200监视洗衣机100的状态。监视终端200配置在洗衣机100的特定区域p52。即,监视终端200安装于洗衣机100的特定区域p52。具体而言,监视终端200的壳体11配置在洗衣机100的特定区域p52。特定区域p52是指在洗衣机100中能够配置监视终端200的区域(能够安装的区域)。特定区域p52表示洗衣机100的上部且角部的区域。图1所示的特定区域p52是一个例子,关于其他特定区域将在后面说明。此外,监视终端200的详细情况将后述。
13.洗衣机100洗涤洗涤物。洗衣机100是卧式滚筒式(以下,简称为“滚筒式”)洗衣机。洗衣机100具备壳体101、盖102、操作显示部103、水槽105、旋转槽106、驱动部107、盖102的开关按钮108。
14.壳体101用于收容水槽105、旋转槽106以及驱动部107。壳体101例如由金属或合成树脂形成。壳体101在盖102的内侧具有开口部104。盖102封闭开口部104。盖102被合页(铰链)支承为能够开关。操作显示部103显示各种信息,并且接受来自用户的操作。
15.旋转槽106及水槽105分别具有将筒体的一端部封闭的形状。旋转槽106及水槽105相对于水平方向向斜上方倾斜。
16.旋转槽106能收容洗涤物。在旋转槽106的一端部形成有旋转槽底部。在旋转槽106的另一端部形成有旋转槽开口部。旋转槽106具有多个孔。旋转槽开口部与盖102相对。旋转槽106配置于水槽105的内侧。旋转槽106以能够旋转的方式支承于水槽105。
17.在水槽105的一端部形成有水槽底部。在水槽105的另一端部形成有水槽开口部。水槽开口部与盖102相对。水槽105以能够摆动的方式支承于壳体101内。向水槽105供给水,并积存水。
18.洗涤处理剂(洗涤剂、柔软剂、漂白剂等)、水以及空气经由旋转槽106的多个孔,能够在水槽105与旋转槽106之间的空间和旋转槽106的内部空间之间流通。
19.接着,参照图1说明洗衣机100的动作。在盖102打开的状态下,从旋转槽开口部向旋转槽106内投入洗涤物。驱动部107使旋转槽106旋转。驱动部107包括马达。驱动部107在水槽105的外部与水槽底部相对。通过旋转槽106旋转,积存于水槽底部的水通过旋转槽106的孔而在旋转槽106与水槽105之间往来。其结果,洗涤物被洗涤。驱动部107是洗衣机100中的振动的产生源。驱动部107相当于本发明的“振动源”的一例。
20.在图1中示出三维正交坐标系的ax轴、ay轴以及az轴。ax轴、ay轴以及az轴相互正交。ax轴以及ay轴与水平面大致平行,az轴与铅垂方向大致平行。洗衣机100以及监视终端200存在于由包括ax轴、ay轴以及az轴的三维正交坐标系(以下,记载为“世界坐标系”)表示的空间。洗衣机100沿az轴方向立起。
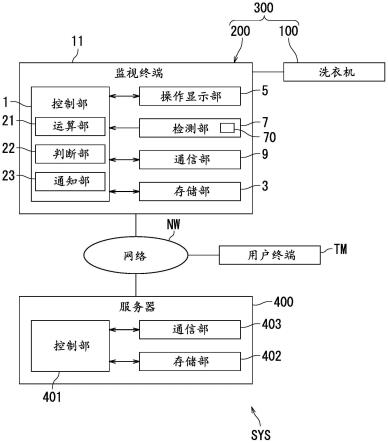
21.接着,参照图2,说明包括洗衣机系统300的监视系统sys。图2是表示监视系统sys的框图。如图2所示,监视系统sys具备洗衣机系统300和服务器400。洗衣机系统300的监视终端200、服务器400以及用户终端tm连接于网络nw,能够相互进行通信。网络nw例如包括互联网、lan(local area network:局域网)、公众电话网以及近距离无线网络。用户终端tm例如是智能手机、移动电话、平板终端或个人计算机。
22.服务器400具有控制部401和存储部402。控制部401包括cpu(central processing unit:中央处理单元)和mpu(micro processing unit:微处理单元)等处理器。存储部402包括存储装置,存储数据以及计算机程序。具体而言,存储部402包括半导体存储器等主存储装置、半导体存储器、固态驱动器以及硬盘驱动器等辅助存储装置。存储部402可以包括可移动介质。存储部402相当于非临时性计算机可读存储介质的一个例子。控制部401的处理器通过执行存储于存储部402的存储装置的计算机程序,执行各种运算及控制。服务器400例如是云服务器。
23.通信部403与网络nw连接。通信部403是通信机。通信部403经由网络nw与监视终端200以及用户终端tm进行通信。通信部403例如包括按照规定的通信协议进行通信的网络接口控制器(nic)。规定的通信协议例如是tcp/ip(transmissioncontrolprotocol/internetprotocol:传输控制协议/互联网协议)协议套件(即,互联网协议套件)。此外,通信部403例如也可以包括执行近距离无线通信的无线通信模块。近距离无线通信例如是bluetooth(注册商标)、zigbee(注册商标)、或者基于wifi的通信标准的通信。此外,通信部403例如也可以包括进行基于移动电话的通信标准的通信的无线通信模块。移动电话的通信标准例如是lte(longtermevolution:长期演进)、4g(第四代移动通信系统)或5g(第五代移动通信系统)。
24.用户终端tm具有与服务器400同样的硬件构成。此外,用户终端tm具有显示各种信
息的显示装置。显示装置例如是液晶显示器或有机电致发光显示器。用户终端tm相当于“外部装置”的一个例子。
25.监视终端200具备控制部1、存储部3、操作显示部5、检测部7、通信部9以及壳体11。壳体11收容控制部1、存储部3、检测部7以及通信部9。控制部1控制存储部3、操作显示部5、检测部7以及通信部9。
26.控制部i包括cpu以及mpu等处理器。存储部3是存储装置,存储数据以及计算机程序。具体而言,存储部3包括主存储装置和辅助存储装置。存储部3可以包括可移动介质。存储部3相当于非临时性计算机可读存储介质的一个例子。控制部1的处理器通过执行存储于存储部3的存储装置的计算机程序,执行各种运算及控制。
27.具体而言,控制部1包括运算部21、判断部22以及通知部23。更具体而言,控制部11的处理器通过执行存储于存储部3的存储装置的计算机程序,从而作为运算部21、判断部22及通知部23发挥功能。
28.操作显示部5显示各种信息,并接受来自用户的各种操作。操作显示部5例如包括显示器和/或显示灯(例如led)。此外,操作显示部5包含触摸传感器和/或开关。
29.检测部7检测洗衣机100的振动,向控制部1输出表示洗衣机100的振动的振动信息。振动信息例如包括表示由洗衣机100的振动引起的加速度的加速度信息和表示由洗衣机100的振动引起的角速度的角速度信息中的至少一个物理量信息。
30.具体而言,检测部7包括加速度传感器以及陀螺仪传感器中的至少一个传感器70。加速度传感器检测洗衣机100的加速度。例如,加速度传感器是检测相互正交的三轴各自的加速度的三轴加速度传感器。陀螺仪传感器检测洗衣机100的角速度。例如,陀螺仪传感器是检测绕相互正交的三轴各自的角速度的三轴陀螺仪传感器。在本实施方式中,通过检测加速度以及角速度中的至少一个物理量,能够容易地检测洗衣机100的振动。即,洗衣机100的振动通过加速度或角速度来表示。
31.控制部1的运算部21基于检测部7的检测结果,推测洗衣机100的动作状态,生成表示洗衣机100的动作状态的动作信息。动作状态表示例如洗衣机100是运转状态还是非运转状态。“运转状态”表示洗衣机100执行洗涤工序(洗涤、漂洗、脱水)的状态。此外,动作状态例如可以表示洗衣机100处于洗涤工序中的哪个阶段。
32.控制部1的通知部23通知洗衣机100的动作信息。具体而言,通知部23经由通信部9、网络nw以及服务器400向用户终端tm发送洗衣机100的动作信息,从而在用户终端tm中通知洗衣机100的动作信息。并且,通知部23也可以不经由服务器400而向用户终端tm发送洗衣机100的动作信息。此外,通知部23也可以通过操作显示部5通知洗衣机100的动作信息。
33.通信部9与网络nw连接。通知部23控制通信部9,以使将洗衣机100的动作信息发送给服务器400。其结果,通信部9将洗衣机100的动作信息经由网络nw发送到服务器400。服务器400相当于“外部装置”的一个例子。
34.具体而言,通信部9是通信机。通信部9经由网络nw与服务器400以及用户终端tm进行通信。通信部9例如包括网络接口控制器。此外,通信部9例如也可以包括执行近距离无线通信的无线通信模块。此外,通信部9例如也可以包括进行基于移动电话的通信标准的通信的无线通信模块。
35.以上,如参照图1以及图2说明的那样,在本实施方式中,仅通过以后装的方式将监
视终端200安装于现有的洗衣机100,就能够监视洗衣机100的状态。因此,与将与监视终端200同样的功能组装到洗衣机100的情况相比,能够降低开发成本。此外,即使在现有的洗衣机100不具有通信功能的情况下,也仅通过以后装的方式将监视终端200安装于现有的洗衣机100,就能够将洗衣机100的信息发送给服务器400。
36.接着,参照图3和图4,说明在洗衣机100中能够配置监视终端200的区域即特定区域。图3是示意性表示洗衣机100的前表面侧的立体图。图4是示意性表示洗衣机100的后表面侧的立体图。在图3以及图4中,通过纵长的长方体来近似洗衣机100的形状,来示意性地示出洗衣机100。此外,重力g的方向由箭头表示。
37.如图3及图4所示,洗衣机100(具体而言为壳体101)具有前面fs、后面bs、顶面ts、侧面ls和侧面rs。前面fs与后面bs在ax轴方向上对置,且与ax轴方向交叉。前面fs与后面bs例如与ax轴方向大致正交。侧面rs与侧面ls在ay轴方向上对置,且与ay轴方向交叉。侧面rs和侧面ls例如与ay轴方向大致正交。顶面ts与az轴方向交叉。顶面ts例如与az轴方向大致正交。
38.在图3和图4中,洗衣机100(具体为壳体101)具有特定区域p11、p12、p21、p22、p31、p32、p33、p34、p41、p42、p51、p52。特定区域表示洗衣机100的上部up且角部cn的区域。例如,洗衣机100在上部up具有4个角部cn。监视终端200(图1)配置于特定区域中的任一区域。即,监视终端200的壳体11(图1)配置于特定区域中的任一区域。因此,根据本实施方式,监视终端200的检测部7(图2)能够有效地检测在洗衣机100的运转中持续产生的振动。
39.接着,参照图3以及图4,说明通过将监视终端200配置在特定区域中的任意一个区域从而能够有效地检测振动的理由。
40.即,洗衣机100的底部bm设置于地面fl。因此,洗衣机100的底部bm能够视为“固定端”。另一方面,当在洗衣机100产生振动vx以及振动vy时,将洗衣机100的底部bm作为固定端,洗衣机100的上部up的振动变大。因此,洗衣机100的上部up能够视为“自由端”。此外,洗衣机100的上部up中的角部cn的振动比其他部分大。因此,将洗衣机100的上部up且角部cn的区域设定为特定区域将监视终端200配置在特定区域中的任一区域。其结果,监视终端200的检测部7能够有效地检测洗衣机100的振动。
41.振动vx表示洗衣机100的振动中的、与ax轴大致平行的振动分量(前后方向的振动分量)。振动vx主要起因于驱动部107(马达)的动作。振动vy表示洗衣机100的振动中的、与ay轴大致平行的振动分量(左右方向的振动分量)。振动vy主要起因于收容有洗涤物的旋转槽106的旋转。例如,振动vy起因于洗涤物在旋转中的旋转槽106的内部偏移。振动vz表示洗衣机100的振动中的、与az轴大致平行的振动分量(铅垂方向的振动分量)。在洗衣机100中,振动vz比较小。振动vz的大小例如由地面fl的材质引起。
42.特别是,在本实施方式中,特定区域p11、p12表示洗衣机100的上部up且角部cn的、洗衣机100的前面fs上的区域。即,特定区域p11表示前面fs上部的一对角区域中的一个角区域。特定区域p12表示前面fs上部的一对角区域中的另一方的角区域。例如,特定区域p11、p12各自的ay轴方向的长度为洗衣机100的前面fs的ay轴方向的长度的约1/3以下。特定区域p11、p12位于前面fs,因此容易配置监视终端200。
43.此外,特定区域p21、p22表示洗衣机100的上部up且角部cn的、洗衣机100的后面bs上的区域。即,特定区域p21表示后面bs上部的一对角区域中的一个角区域。特定区域p22表示后面bs上部的一对角区域中的另一方的角区域。例如,特定区域p21、p22各自的ay轴方向的长度为洗衣机100的后面bs的ay轴方向的长度的约1/3以下。由于特定区域p21、p22位于后面bs,因此能够抑制监视终端200被人看到、用户不小心触摸而成为妨碍、或者由此带来不必要的振动。
44.进一步,特定区域p31、p32、p33、p34表示洗衣机100的上部up且角部cn的、洗衣机100的顶面ts上的区域。即,特定区域p31表示顶面ts前部的一对角区域中的一个角区域。特定区域p32表示顶面ts前部的一对角区域中的另一方的角区域。特定区域p33表示顶面ts后部的一对角区域中的一个角区域。特定区域p34表示顶面ts后部的一对角区域中的另一方的角区域。例如,特定区域各自的ay轴方向的长度为洗衣机100的顶面ts的ay轴方向的长度的约1/3以下。例如,特定区域各自的ax轴方向的长度为洗衣机100的顶面ts的ax轴方向的长度的约1/3以下。特定区域p31、p32、p33、p34位于顶面ts,因此容易配置监视终端200。此外,能够稳定地配置监视终端200。
45.进一步,特定区域p41、p42表示洗衣机100的上部up且角部cn的、洗衣机100的侧面ls上的区域。即,特定区域p41表示侧面ls上部的一对角区域中的一个角区域。特定区域p42表示侧面ls上部的一对角区域中的另一方的角区域。例如,特定区域p41、p42各自的ax轴方向的长度为洗衣机100的侧面ls的ax轴方向的长度的约1/3以下。由于特定区域p41、p42位于侧面ls,因此比较容易配置监视终端200,与前面fs相比,更难以被人看到。
46.进一步,特定区域p51、p52表示洗衣机100的上部up且角部cn的、洗衣机100的侧面rs上的区域。即,特定区域p51表示侧面rs上部的一对角区域中的一个角区域。特定区域p52表示侧面rs上部的一对角区域中的另一方的角区域。例如,特定区域p51、p52各自的ax轴方向的长度为洗衣机100的侧面rs的ax轴方向的长度的约1/3以下。由于特定区域p51、p52位于侧面rs,因此比较容易配置监视终端200,与前面fs相比,更难以被人看到。
47.以上,如参照图3以及图4说明的那样,根据本实施方式,通过在12个特定区域中的任一区域配置监视终端200,监视终端200的检测部7能够高精度地检测洗衣机100的振动。
48.此外,在本实施方式中,特定区域优选为比洗衣机100的水槽105靠上方的区域。根据该优选的例子,监视终端200的检测部7能够更高精度地检测洗衣机100的振动。这是因为,在水槽105中积存水,因此因水槽105的晃动,洗衣机100的上部up且角部cn会较大地振动。
49.接着,参照图5,说明固定于监视终端200的坐标系(以下,记载为“传感器坐标系”)。以下,作为一例,对传感器70是加速度传感器的例子进行说明。因此,在以下的说明中,将传感器70记载为“加速度传感器70”。传感器坐标系固定于检测部7的加速度传感器70。图5是示意性表示监视终端200的立体图。在图5中,通过长方体来近似监视终端200的形状,由此示意性地表示监视终端200。
50.如图5所示,传感器坐标系具有相互正交的ax轴、ay轴以及az轴。具体而言,ax轴、ay轴以及az轴表示加速度传感器70的三个加速度轴。因此,加速度传感器70检测ax轴方向
的加速度ax#、ay轴方向的加速度ay#以及az轴方向的加速度az#。此外,在本实施方式中,以“α”表示绕ax轴的旋转角度。以“β”表示绕ay轴的旋转角度。以“γ”表示绕az轴的旋转角度。各个旋转角度中,以右螺纹朝向轴的正方向行进的方向为正方向。
51.并且,虽然世界坐标系未固定于洗衣机100,但为了方便说明,有时将世界坐标系的ax轴、ay轴以及az轴分别记载为洗衣机100的ax轴、ay轴以及az轴。
52.接着,参照图6和图7,说明利用了监视终端200的洗衣机100的监视方法。图6是示意性表示洗衣机系统300的立体图。在图6中,通过纵长的长方体来近似洗衣机100的形状,从而示意性地表示洗衣机100。此外,重力g的方向由箭头表示。在图6的例子中,监视终端200配置于特定区域p52。图7表示利用监视终端200的监视方法的流程图。如图7所示,监视方法包括步骤s1步骤s8。
53.如图6以及图7所示,首先,在步骤s1中,将监视终端200配置于洗衣机100的特定区域p52。
54.具体而言,以使加速度传感器70的ax轴的正方向沿着洗衣机100的ax轴的正方向的方式,将监视终端200(壳体11)配置于特定区域p52。例如,以使ax轴与ax轴所成的角度成为约10度以内的方式,将监视终端200配置于特定区域p52。优选的是,以使ax轴与ax轴大致平行的方式,将监视终端200配置在特定区域p52。
55.在ax轴的正方向与ax轴的正方向所成的角度为约10度以内的情况下,式(1)、式(2)以及式(3)精度良好地成立。在ax轴与ax轴大致平行的情况、即ax轴的正方向与ax轴的正方向所成的角度为约零度的情况下,式(1)、式(2)以及式(3)的精度最好。“*”表示乘法运算。“ax#”表示世界坐标系中的ax轴方向的加速度。加速度ax#表示世界坐标系中的洗衣机100的振动vx。“ay#”表示世界坐标系中的ay轴方向的加速度。加速度ay#表示世界坐标系中的洗衣机100的振动vy。“az#”表示世界坐标系中的az轴方向的加速度。加速度az#表示世界坐标系中的洗衣机100的振动vz。
56.[数学式1]ax#=cosβ*ax#+sinα*sinβ*ay#-cosα*sinβ*az#
…
(1)
[0057]
[数学式2]ay#=cosα*ay#+sinα*az#
…
(2)
[0058]
[数学式3]az#=sinβ*ax#-sinα*cosβ*ay#+cosα*cosβ*az#
…
(3)
[0059]
接着,在步骤s2中,监视终端200的控制部11的运算部21在洗衣机100为非运转状态时,从加速度传感器70获取加速度ax0、加速度ay0以及加速度az0的信息。即,加速度ax0、加速度ay0以及加速度az0分别表示在洗衣机100处于非运转状态时由加速度传感器70检测到的加速度ax#加速度ay#以及加速度az#。
[0060]
接着,在步骤s3中,运算部21基于加速度ax0、加速度ay0以及加速度az0,对洗衣机100处于非运转状态时的旋转角度α、β进行校正,将校正后的旋转角度α0、β0存储于存储部3。
[0061]
具体地,运算部21将加速度ax0、加速度ay0和加速度az0分别代入算式(3)的“ax#”、“ay#”以及“az#”,导出算式(4)。
[0062]
[数学式4]az#=sinβ*ax0-sinα*cosβ*ay0+cosα*cosβ*az0
…
(4)
[0063]
运算部21在式(4)中使“α”和“β”分别从0度变化至360度,搜索“az#”成为最大值时的“α”和“β”。将“az#”达到最大值时的“α”及“β”分别记载为“α0”及“β0”。达到最大值时的“az#”的值是与√(ax02+ay02+az02)=1g(重力加速度)在逻辑上相同的值。运算部21将校正后的旋转角度α0、β0存储于存储部3。
[0064]
运算部21通过对式(1)、式(2)以及式(3)的旋转角度α、β分别代入旋转角度α0、β0,导出式(5)、式(6)以及式(7)。运算部21将式(5)、式(6)以及式(7)存储于存储部3。
[0065]
[数学式5]ax#=cosβ0*ax#+sinα0*sinβ0*ay#-cosα0*sinβ0*az#
…
(5)
[0066]
[数学式6]ay#=cosα0*ay#+sinα0*az#
…
(6)
[0067]
[数学式7]az#=sinβ0*ax#-sinα0*cosβ0*ay#+cosα0*cosβ0*az#
…
(7)
[0068]
接着,在步骤s4中,运算部21从加速度传感器70获取加速度ax#、加速度ay#以及加速度az#的信息。在该情况下,在洗衣机100为运转状态的情况下,运算部21获取在洗衣机100运转中由加速度传感器70检测到的加速度ax#、ay#、az#的信息。
[0069]
接着,在步骤s5中,运算部21将从加速度传感器70获取的加速度ax#、ay#、az#代入式(5),计算加速度ax#。在加速度ax#、ay#、az#是在洗衣机100运转中由加速度传感器70检测到的加速度的情况下,加速度ax#表示洗衣机100的ax轴方向上的振动分量vx。
[0070]
此外,运算部21将从加速度传感器70获取的加速度ay#、az#代入式(6),计算加速度ay#。在加速度ay#、az#是在洗衣机100运转中由加速度传感器70检测到的加速度的情况下,加速度ay#表示洗衣机100的ay轴方向的振动分量vy。
[0071]
进一步,运算部21将从加速度传感器70获取的加速度ax#、ay#、az#代入式(7),计算加速度az#。在加速度ax#、ay#、az#是在洗衣机100运转中由加速度传感器70检测到的加速度的情况下,加速度az#表示洗衣机100的az轴方向上的振动分量vz。
[0072]
此外,步骤s4、s5继续执行。
[0073]
接着,在步骤s6中,控制部11的判断部22基于加速度ax#、ay#、az#来判断监视终端200向洗衣机100的安装状态或洗衣机100的设置状态。步骤s6的详细内容将后述。
[0074]
接下来,在步骤s7中,运算部21基于加速度ax#、ay#、az#来推测洗衣机100的动作状态。
[0075]
接着,在步骤s8中,通知部23通知表示洗衣机100的动作状态的动作信息。并且,通知部23也可以通过通信部9将加速度ax#、ay#、az#的信息、即表示洗衣机100的振动的振动
信息发送给服务器400。然后,处理进入步骤s4。
[0076]
以上,如参照图6以及图7说明的那样,根据本实施方式,以使加速度传感器70的3轴ax、ay、az中的1轴即ax轴(即,特定轴)的正方向沿着配置洗衣机100的世界坐标系的ax轴(即,基准轴)的正方向的方式,将壳体11配置于特定区域p52。因此,式(1)~式(7)的近似式的精度良好。其结果,运算部21能够高精度地计算加速度ax#、ay#、az#。
[0077]
在此,“基准轴”表示世界坐标系的3轴ax、ay、az中成为用于监视终端200相对于特定区域的对位的基准的轴。“基准轴”例如与特定区域中的配置监视终端200的特定区域大致平行。“基准轴”例如与铅锤方向大致正交。“特定轴”表示加速度传感器70的3轴ax、ay、az中要求与“基准轴”对齐的轴。“特定轴”例如是与加速度传感器70的3轴ax、ay、az中的与配置监视终端200的特定区域交叉的轴不同的轴。优选的是,例如,“特定轴”是与加速度传感器70的3轴ax、ay、az中的与配置监视终端200的特定区域大致正交的轴不同的轴。
[0078]
此外,在图6中,例如在洗衣机100的上部up中,通过使监视终端200的角部与洗衣机100的壳体11的角部对准,也能够容易地将加速度传感器70的特定轴与世界坐标系的基准轴对准。
[0079]
此外,在本实施方式中,运算部21基于在洗衣机100处于非运转状态时检测部7的加速度传感器70检测到的3轴ax、ay、az各自的加速度ax0、ay0、az0,在洗衣机100的非运转状态下校正3轴ax、ay、az中的与特定区域p52交叉的轴az不同的绕2轴ax、ay的旋转角度α、β,获取校正后的旋转角度α0、β0。然后,运算部21基于校正后的旋转角度α0、β0和在洗衣机100处于运转状态时由检测部7的加速度传感器70检测到的加速度ax#、ay#、az#,来计算世界坐标系中的洗衣机100的振动分量vx、vy、vz,即加速度ax#、ay#、az#。即,运算部21能够通过简单的运算来高精度地计算表示洗衣机100的振动分量vx、vy、vz的加速度ax#、ay#、az#。
[0080]
换言之,在本实施方式中,能够通过如式(5)~式(7)那样的简单的算式来计算表示洗衣机100的振动的加速度ax#、ay#、az#。因此,即使是处理能力比较低的控制部1,也能够容易地算出加速度ax#、ay#、az#。基于同样的理由,能够抑制控制部1的功耗的增加。
[0081]
在此,在步骤s1中,也可以以使加速度传感器70的ay轴沿着洗衣机100的ax轴的方式将监视终端200配置于特定区域p52。例如,以使ay轴与ax轴所成的角度成为约10度以内的方式,将监视终端200配置于特定区域p52。优选地,以使ay轴与ax轴大致平行的方式,将监视终端200配置在特定区域p52。
[0082]
此外,图6示出的加速度传感器70的ax轴、ay轴以及az轴的配置为一个例子,在ax轴、ay轴以及az轴与ax轴、ay轴以及az轴具有与上述同样的关系的情况下,通过将式(1)~式(7)示出的旋转转换式的各轴以及符号与加速度传感器70的配置相匹配地置换,同样的旋转转换式成立。
[0083]
此外,在参照图7说明的实施方式中,基于洗衣机100处于非运转状态下的加速度传感器70的值ax0、ay0、az0,获取校正后的旋转角度α0、β0。但是,也可以按如下方式获取校正后的旋转角度α0、β0。
[0084]
即,运转中的振动由以非运转状态下测量的加速度值为中间值、正负大致以一定的值变动的加速度表示。因此,能够使运转中的加速度传感器70的值的平均值设为ax0、ay0、az0。基于这样导出的ax0、ay0、az0,导出式(4),从而获取校正后的旋转角度α0、β0。
[0085]
接着,参照图2及说明判断部22及通知部23。图2所示的判断部22基于用于检测洗衣机100的振动的检测部7的检测结果,判断监视终端200向洗衣机100的安装状态或洗衣机100的设置状态。因此,根据本实施方式,在向洗衣机100的安装状态产生了异常的情况下、或者洗衣机100的设置状态产生了异常的情况下,监视终端200能够向用户通知,以使监视终端200的安装状态或者洗衣机100的设置状态恢复正常。在该情况下,例如,在接收到通知的用户使监视终端200的安装状态或洗衣机100的设置状态恢复为正常,从而运算部21能够高精度地计算加速度ax#、ay#、az#。其结果,运算部21能够抑制洗衣机100的动作状态的误决定。
[0086]
监视终端200向洗衣机100的安装状态异常例如表示监视终端200从洗衣机100脱离的状态、或者监视终端200从洗衣机100脱落的状态。
[0087]
具体而言,在洗衣机100的驱动部107为停止状态的情况下,判断部22根据基于加速度传感器70的检测结果计算出的铅垂方向的加速度az#与重力加速度的比较结果,判断监视终端200的安装状态或洗衣机100的设置状态。因此,根据本实施方式,能够通过运算负荷小的比较处理来判断监视终端200的安装状态或洗衣机100的设置状态。并且,作为与加速度az#的比较对象的重力加速度,可以是重力加速度本身(=1g),也可以具有以重力加速度为中心的宽度。
[0088]
此外,在洗衣机100的驱动部107为停止状态的情况下,判断部22也可以根据基于加速度传感器70的检测结果计算出的水平方向的加速度ax#或加速度ay#与表示大致为零的基准加速度的比较结果,判断监视终端200的安装状态或洗衣机100的设置状态。在该情况下,能够通过运算负荷小的比较处理来判断监视终端200的安装状态或洗衣机100的设置状态。并且,作为与加速度ax#和ay#的比较对象的基准加速度可以是零,也可以具有以零为中心的宽度。
[0089]
进一步,在洗衣机100的驱动部107处于工作状态的情况下,判断部22根据基于加速度传感器70的检测结果计算出的表示加速度ax#、ay#、az#的波形的振幅的中间值,判断监视终端200的安装状态或洗衣机100的设置状态。因此,根据本实施方式,即使在驱动部107为工作状态的情况下,也能够容易地判断监视终端200的安装状态或洗衣机100的设置状态。
[0090]
在此,驱动部107的停止状态表示驱动部107停止的状态。也就是说,驱动部107的停止状态表示驱动部107是未由驱动部107自身振动的状态。例如,驱动部107的停止状态表示驱动部107(马达)不旋转的状态。此外,驱动部107的工作状态表示驱动部107工作的状态。也就是说,驱动部107的工作状态表示驱动部107自身振动的状态。例如,驱动部107的工作状态表示驱动部107(马达)旋转的状态。
[0091]
接下来,参照图8以及图9来详细地说明判断部22。图8是示出在监视终端200的安装状态以及洗衣机100的设置状态为正常的情况下基于检测部7的检测结果计算出的加速度ax#、ay#、az#的时间变化的一例的图。如图8所示,波形图cx1示出加速度ax#的波形。波形图cy1示出加速度ay#的波形。波形图cz1示出加速度az#的波形。此外,在图8以及图9中,将加速度ax#朝向前方的加速度设为正方向,将加速度ay#朝向右方的加速度设为正方向,将加速度az#朝向下方的加速度设为正方向。
[0092]
在期间t(stop)下,由于驱动部107停止,因此加速度传感器70仅检测重力加速度。
因此,在监视终端200的安装状态和洗衣机100的设置状态为正常的情况下,在期间t(stop)内,加速度az#表示大致重力加速度,加速度ax#和加速度ay#表示大致零(基准加速度)。
[0093]
在洗衣机100为运转状态t(drive)的情况下,即使在驱动部107为停止状态的情况下,若进行注水或排水动作,则也产生微小的振动。在运转状态t(drive)下,期间t1、t3、t5例如表示进行注水以及排水的期间。此外,期间t1、t3、t5、t7包括洗衣机100进行“洗涤”、“漂洗”、“松开”动作等驱动部107间歇地动作的期间。在期间t1、t3、t5、t7中,加速度az#的振幅的中间值mz表示大致重力加速度,加速度ax#的振幅的中间值mx及加速度ay#的振幅的中间值my表示大致零。“运转状态”表示洗衣机100执行洗涤工序的状态。
[0094]
此外,在运转状态t(drive)下,期间t2、t4、t6例如表示进行“脱水”的期间。即,期间t2、t4、t6分别表示洗衣机100的驱动部107连续地处于工作状态时的期间。
[0095]
在期间t2、t4、t6各自中,驱动部107连续地进行动作,因此加速度传感器70不仅检测重力加速度,还容易检测表示基于驱动部107的振动的洗衣机100的振动的加速度。在监视终端200的安装状态和洗衣机100的设置状态为正常的情况下,在期间t2、t4、t6各自中,加速度az#的振幅的中间值mz表示大致重力加速度,加速度ax#的振幅的中间值mx和加速度ay#的振幅的中间值my表示大致零(基准加速度)。并且,在尽管洗衣机100是运转状态还是非运转状态,在监视终端200的安装状态和洗衣机100的设置状态正常的情况下,加速度az#的振幅的中间值mz表示大致重力加速度,加速度ax#的振幅的中间值mx和加速度ay#的振幅的中间值my表示大致零。
[0096]
图9是表示在监视终端200的安装状态或洗衣机100的设置状态为异常的情况下基于检测部7的检测结果计算出的加速度ax#、ay#、az#的时间变化的一例的图。如图9所示,波形图cx2示出加速度ax#的波形。波形图cy2示出加速度ay#的波形。波形图cz2示出加速度az#的波形。
[0097]
在图9所示的例子中,在期间t1、t3、t5、t7中,加速度az#表示比重力加速度小的值,加速度ax#表示比大致为零(基准加速度)大的值,加速度ay#表示比大致为零(基准加速度)小的值。这是因为,由于监视终端200的安装状态或洗衣机100的设置状态为异常,因此重力加速度并非仅由加速度az#表示,而是重力加速度的分量出现在加速度ax#、ay#上。
[0098]
因此,判断部22判断在期间t1、t3、t5、t7中加速度az#是否小于重力加速度。然后,在加速度az#比重力加速度小的情况下,判断部22判断为监视终端200的安装状态或洗衣机100的设置状态异常。另一方面,如图8所示,在期间t1、t3、t5、t7中,在加速度az#表示大致重力加速度的情况下,判断部22判断监视终端200的安装状态和洗衣机100的设置状态为正常。
[0099]
具体而言,在洗衣机100为运转状态的情况下,即使在驱动部107为停止状态的情况下,也产生微小的振动。因此,判断部22判断在期间t1、t3、t5、t7中加速度az#的振幅的中间值mz是否小于重力加速度。而且,如图9所示,在加速度az#的振幅的中间值mz小于重力加速度的情况下,判断部22判断为监视终端200的安装状态或洗衣机100的设置状态异常。另一方面,如图8所示,在期间t1、t3、t5、t7中,在加速度az#的振幅的中间值mz表示大致重力加速度的情况下,判断部22判断为监视终端200的安装状态和洗衣机100的设置状态正常。
[0100]
此外,判断部22也可以在期间t1、t3、t5、t7中,判断加速度ax#是否与大致为零(基准加速度)不同、和/或加速度ay#是否与大致为零(基准加速度)不同。然后,如图9所示,在
加速度ax#或加速度ay#与大致零(基准加速度)不同的情况下,判断部22判断为监视终端200的安装状态或洗衣机100的设置状态异常。另一方面,如图8所示,在期间t1、t3、t5、t7中,在加速度ax#以及加速度ay#表示大致为零(基准加速度)的情况下,判断部22判断为监视终端200的安装状态以及洗衣机100的设置状态正常。
[0101]
具体而言,在洗衣机100为运转状态的情况下,即使在驱动部107为停止状态的情况下,也产生微小的振动。因此,在期间t1、t3、t5、t7中,判断部22判断加速度ax#的振幅的中间值mx是否与大致为零(基准加速度)不同、和/或加速度ay#的振幅的中间值my是否与大致为零(基准加速度)不同。然后,如图9所示,在加速度ax#或加速度ay#的振幅的中间值mx、my与大致为零(基准加速度)不同的情况下,判断部22判断为监视终端200的安装状态或洗衣机100的设置状态异常。另一方面,如图8所示,在期间t1、t3、t5、t7中,在加速度ax#的振幅的中间值mx和加速度ay#的振幅的中间值my示出大致为零(基准加速度)的情况下,判断部22判断为监视终端200的安装状态和洗衣机100的设置状态为正常。
[0102]
此外,不限于洗衣机100处于运转状态且驱动部107处于停止状态的情况,判断部22例如也可以根据洗衣机100的电源接通来判断监视终端200的安装状态或洗衣机100的设置状态。这是因为,在洗衣机100的电源刚接通之后的一定期间,驱动部107为停止状态。
[0103]
在此,例如,判断部22在合成加速度axyz的振幅处于规定范围rg1内的情况下,判断为驱动部107为停止状态。在此,由axyz=√(ax#2+ay#2+az#2)定义。此外,例如,在加速度ax#、加速度ay#以及加速度az#各自的振幅处于规定范围rg2内的情况下,判断部22也可以判断为驱动部107处于停止状态。
[0104]
此外,在期间t2、t4、t6中,判断部22判断加速度az#的振幅的中间值mz是否小于重力加速度。而且,如图9所示,在加速度az#的振幅的中间值mz小于重力加速度的情况下,判断部22判断为监视终端200的安装状态或洗衣机100的设置状态异常。另一方面,如图8所示,在期间t2、t4、t6中,在加速度az#的振幅的中间值mz表示大致重力加速度的情况下,判断部22判断为监视终端200的安装状态和洗衣机100的设置状态正常。
[0105]
进一步,在期间t2、t4、t6中,判断部22也可以判断加速度ax#的振幅的中间值mx是否与大致为零(基准加速度)不同、和/或加速度ay#的振幅的中间值my是否与大致为零(基准加速度)不同。然后,如图9所示,在加速度ax#或加速度ay#的振幅的中间值mx、my与大致为零(基准加速度)不同的情况下,判断部22判断为监视终端200的安装状态或洗衣机100的设置状态异常。另一方面,如图8所示,在期间t2、t4、t6中,在加速度ax#的振幅的中间值mx和加速度ay#的振幅的中间值my表示大致为零(基准加速度)的情况下,判断部22判断为监视终端200的安装状态和洗衣机100的设置状态正常。
[0106]
返回到图2,在判断部22判断为监视终端200的安装状态或洗衣机100的设置状态异常的情况下,通知部23通知警告信息(以下,记载为“警告信息al1”)。警告信息al1包括:表示监视终端200的安装状态或洗衣机100的设置状态异常的信息;以及提示用户使监视终端200的安装状态或洗衣机100的设置状态回复正常的信息。因此,根据本实施方式,用户能够了解监视终端200的安装状态或洗衣机100的设置状态的异常。因此,用户能够将监视终端200的安装状态或洗衣机100的设置状态恢复为正常。即,能够防止监视终端200的安装状态或洗衣机100的设置状态异常的情况被放置。
[0107]
进一步,在警告信息al1的通知后,在判断部22判断为监视终端200的安装状态或
洗衣机100的设置状态的异常持续的情况下,当异常的程度在预先确定的允许范围内时,运算部21对表示检测部7的姿势的旋转角度α、β进行校正,获取校正后的旋转角度α0、β0。因此,根据本实施方式,即使在监视终端200的安装状态或洗衣机100的设置状态未被用户恢复正常的情况下,也能够通过校正旋转角度α、β来高精度地计算加速度ax#、ay#、az#。并且,监视终端200的安装状态或洗衣机100的设置状态的异常是否持续的判断方法与监视终端200的安装状态或洗衣机100的设置状态是否异常的判断方法相同。
[0108]
例如,在判断为监视终端200的安装状态或洗衣机100的设置状态的异常持续的情况下,在加速度az#的绝对值大于加速度阈值tha的情况下,判断部22判断为异常的程度在预先确定的允许范围内。加速度阈值tha表示比重力加速度小的值。并且,判断部22也可以比较加速度az#的振幅的中间值mz和加速度阈值tha。
[0109]
例如,在判断为监视终端200的安装状态或洗衣机100的设置状态的异常持续的情况下,判断部22也可以在加速度ax#的绝对值和/或加速度ay#的绝对值小于加速度阈值thb的情况下,判断为异常的程度在预先确定的允许范围内。加速度阈值thb表示比零大的值。并且,判断部22也可以比较加速度ax#、ay#的振幅的中间值mx、my和加速度阈值thb。
[0110]
并且,在异常的程度在允许范围内的情况下,例如表示监视终端200相对于洗衣机100的基准轴倾斜的状态。
[0111]
进一步,在警告信息al1的通知后,在判断部22判断为监视终端200的安装状态或洗衣机100的设置状态的异常持续的情况下,在异常的程度在预先确定的允许范围外的情况下,通知部23不进行洗衣机100的动作信息的通知。因此,根据本实施方式,能够防止洗衣机100的动作信息的误通知。
[0112]
例如,在判断为监视终端200的安装状态或洗衣机100的设置状态的异常持续的情况下,在加速度az#的绝对值为加速度阈值tha以下的情况下,判断部22判断为异常的程度在预先确定的允许范围外。
[0113]
例如,在判断为监视终端200的安装状态或洗衣机100的设置状态的异常持续的情况下,判断部22也可以在加速度ax#的绝对值和/或加速度ay#的绝对值在加速度阈值thb以上的情况下,判断为异常的程度在预先确定的允许范围外。
[0114]
此外,在异常的程度在允许范围外的情况下,例如表示监视终端200从洗衣机100脱离而落在地面fl上的状态。
[0115]
接着,参照图10说明水准仪图像30。图10是表示水准仪图像30的一个例子的图。图2的通知部23通知图10所示的水准仪图像30。水准仪图像30表示洗衣机100的倾斜度。具体而言,水准仪图像30包括第一坐标轴h1、第二坐标轴h2以及引导图像31。第一坐标轴h1相当于三维正交坐标系的ax轴(图6)。第二坐标轴h2相当于三维正交坐标系的ay轴(图6)。第一坐标轴h1和第二坐标轴h2相互正交。在由第一坐标轴h1及第二坐标轴h2规定的坐标系中,引导图像31的第一坐标表示加速度ax#,引导图像31的第二坐标表示加速度ay#。因此,引导图像31根据加速度ax#、ay#的大小进行移动。在引导图像31位于原点b的情况下,表示洗衣机100大致水平地设置。即,用户一边观察水准仪图像30,一边调整洗衣机100的倾斜,以使引导图像31位于原点b。即,用户调整洗衣机的倾斜,以使加速度ax#ay#大致为零。
[0116]
以上,如参照图10说明的那样,通知部23根据基于加速度传感器70的检测结果计算出的水平方向的加速度ay#、az#来生成并报告水准仪图像30。在该情况下,水平方向的加
速度ay#、az#表示相互正交的2轴ax、ay方向的加速度。根据本实施方式,用户通过观察水准仪图像30,能够容易地使洗衣机100的倾斜恢复到正常的状态。即,用户通过观察水准仪图像30,能够容易地大致水平地设置洗衣机100。
[0117]
在此,在图7的步骤s3完成的阶段,合成加速度axy大致为零。在此,通过axy=√(ax#2+ay#2)来定义。因此,例如,在洗衣机100为非运转状态的情况下的合成加速度axy或驱动部107为停止状态的情况下的合成加速度axy成为阈值thc以上的情况下,通知部23可以通知警告信息(以下,记载为“警告信息al2”)。警告信息al2表示监视终端200的安装状态或洗衣机100的设置状态有可能成为异常的可能性。因此,用户能够在监视终端200的安装状态成为异常之前以及洗衣机100的设置状态成为异常之前调整监视终端200的安装状态以及洗衣机100的设置状态。阈值thc例如是接近于零的值。并且,在合成加速度axy成为阈值thc以上的情况下,通知部23可以通知警告信息al1。
[0118]
并且,通知部23通过经由网络nw和服务器400向用户终端tm发送警告信息al2,在用户终端tm通知警告信息al2。并且,通知部23也可以不经由服务器400而向用户终端tm发送警告信息al2。此外,通知部23也可以通过操作显示部5通知警告信息al2。
[0119]
接下来,参照图2以及图11说明图7的步骤s6的详细内容。图11是示出在本实施方式所涉及的监视方法中用于判断监视终端200的安装状态或者洗衣机100的设置状态的处理(步骤s6)的流程图。如图7所示,处理包括步骤s61~s67。
[0120]
首先,在步骤s61中,判断部22基于合成加速度axyz,判断驱动部107是否为停止状态。即,判断部22判断合成加速度axyz的振幅是否在规定范围rg1内。
[0121]
当在步骤s61中判断为驱动部107为停止状态时,即,在判断为合成加速度axyz的振幅处于规定范围rg1内时(是),处理进入步骤s62。
[0122]
接下来,在步骤s62中,判断部22判断加速度az#、ax#、ay#是否满足驱动部107的停止状态下的异常条件。异常条件是加速度az#小于重力加速度、加速度ax#与表示大致为零的基准加速度不同、或者加速度ay#与表示大致为零的基准加速度不同。
[0123]
当在步骤s62中判断为不满足异常条件的情况下,即,在监视终端200的安装状态和洗衣机100的设置状态被判断为正常的情况下,处理返回到图7的主程序,进入步骤s7。不满足异常条件的情况是指加速度az#与重力加速度大致相等,加速度ax#与基准加速度相等,加速度ay#与基准加速度相等。
[0124]
另一方面,当在步骤s61中判断为驱动部107不是停止状态时、即判断为驱动部107是工作状态时,处理进入至步骤s63。判断为驱动部107不是停止状态的情况表示合成加速度axyz的振幅未处于规定范围rg1内。
[0125]
接着,在步骤s63中,判断部22判断加速度az#、ax#、ay#是否满足驱动部107的工作状态下的异常条件。异常条件是加速度az#的振幅的中间值mz小于重力加速度、加速度ax#的振幅的中间值mx与表示大致为零的基准加速度不同、或者加速度ay#的振幅的中间值my与表示大致为零的基准加速度不同。
[0126]
当在步骤s63中判断为不满足异常条件的情况下,即,在监视终端200的安装状态和洗衣机100的设置状态被判断为正常的情况下,处理返回到图7的主程序,进入步骤s7。并且,在步骤s63中,也可以不进行异常条件的判断,而返回图7的主程序,进入步骤s7。在该情况下,仅在驱动部107为停止状态时,判断监视终端200的安装状态或洗衣机100的设置状
态。
[0127]
在步骤s62或步骤s63中判断为满足异常条件之后,即,在监视终端200的安装状态或洗衣机100的设置状态被判断为异常之后,在步骤s64中,通知部23通知警告信息al1及水准仪图像30。具体而言,通知部23经由网络nw和服务器400向用户终端tm发送警告信息al1和水准仪图像30,从而在用户终端tm通知警告信息al1和水准仪图像30。并且,通知部23也可以不经由服务器400而向用户终端tm发送警告信息al1及水准仪图像30。此外,通知部23也可以通过操作显示部5通知警告信息al1及水准仪图像30。
[0128]
接着,在步骤s65中,判断部22判断监视终端200的安装状态或洗衣机100的设置状态的异常是否持续。异常是否持续的判断方法与步骤s62、s63相同。
[0129]
当在步骤s65中判断为异常未继续时,处理返回到图7的主程序,进入步骤s7。即,判断为异常未持续的情况表示用户使监视终端200的安装状态或洗衣机100的设置状态恢复正常。
[0130]
另一方面,当在步骤s65中判断为异常正在持续时,处理进入到步骤s66。
[0131]
接着,在步骤s66中,判断部22判断异常的程度是否在预先确定的允许范围内。
[0132]
在步骤s66中判断为异常的程度不在允许范围内的情况下,即,在判断为异常的程度在允许范围外的情况下,处理进入步骤s67。
[0133]
接着,在步骤s67中,判断部22禁止通知部23通知洗衣机100的动作信息。此外,判断部22禁止运算部21生成洗衣机100的动作信息。然后,处理进入到步骤s61。
[0134]
另一方面,当在步骤s66中判断为异常的程度在允许范围内时,处理返回到图7的主程序,进入步骤s2。其结果,在步骤s2之后的步骤s3中,旋转角度α、β被校正,获取校正后的旋转角度α0、β0。其结果,即使在判断为监视终端200的安装状态或洗衣机100的设置状态的异常持续的情况下,也能够高精度地计算加速度ax#、ay#、az#。
[0135]
接着,参照图12以及图13,说明监视终端200的一个例子。图12表示监视终端200的一个例子的立体图。如图12所示,监视终端200具备壳体11。此外,监视终端200的操作显示部5包括开关51、52以及显示灯53、54。显示灯53、54例如包括led。开关51生成指示控制部1执行监视终端200的初始设定以及向网络nw以及服务器400的连接的指示信号。若按下开关51,则控制部1按照指示信号执行监视终端200的初始设定,并且将通信部9与网络nw以及服务器400连接。并且,控制部1点亮显示灯53。开关52执行监视终端200的电源的接通/断开。若通过开关52接通电源,则控制部11点亮显示灯54。
[0136]
此外,监视终端200还具备一个或多个磁铁55。磁铁55固定于壳体11的底部。因此,在洗衣机100的壳体101是磁性体的情况下,能够容易地将监视终端200配置在洗衣机100的壳体101(特定区域)。
[0137]
图13是表示监视终端200的一个例子的分解立体图。如图13所示,监视终端200的壳体11包括第一壳体部111和第二壳体部112。第一壳体部111安装于第二壳体部112。并且,监视终端200还具备电路基板15。检测部7配置于电路基板15。并且,在图13中,为了简化附图,省略了配置于电路基板15的各种电路、控制部1、存储部3以及通信部9。第一壳体部111以覆盖电路基板15的方式安装于第二壳体部112。监视终端200例如可以具备端子17。端子17例如是电源供给用端子。
[0138]
从商用电源、洗衣机100等向端子17供给电源。由此,即使在监视终端200内没有电
池等也能够进行运转。此外,端子17例如也可以设为usb等具有通信功能的端子。在该情况下,能够将信息设备与端子17连接,执行监视终端200的系统更新等。此外,在端子17上连接其它检测部,能够获取相邻的洗衣机100的振动信息,或者获取洗衣机100的特定部位的振动信息。
[0139]
此外,监视终端200的壳体11具有监视终端标记部13,该监视终端标记部13用于使加速度传感器70的3轴ax、ay、az中的特定轴(在图6的例子中为ax轴)与世界坐标系的3轴ax、ay、az中的基准轴(在图6的例子中为ax轴)对齐。监视终端标记部13表示沿着加速度传感器70的3轴ax、ay、az中的特定轴的方向。即,监视终端标记部13与加速度传感器70的三轴ax、ay、az中的特定轴大致平行。因此,用户将监视终端标记部13作为标记,容易将监视终端200配置在洗衣机100的特定区域p11~p52中,以使加速度传感器70的特定轴沿着世界坐标系的基准轴。
[0140]
监视终端标记部13例如既可以刻印在壳体11上,也可以是贴纸,也可以是涂装。
[0141]
接下来,参照图14~图16,对本实施方式的第一变形例~第四变形例进行说明。在以下的说明中,关于第一变形例第四变形例,主要说明与参照说明的监视终端200不同的部分。
[0142]
(第一变形例)参照图14,说明本实施方式的第一变形例。在第一变形例中,说明洗衣机100具有第一洗衣机标记部109的例子。图14a是示意性表示第一变形例所涉及的洗衣机系统300的局部立体图。如图14a所示,洗衣机100在洗衣机100中具备第一洗衣机标记部109,该第一洗衣机标记部109用于使加速度传感器70的3轴ax、ay、az中的特定轴(图14a的例子中是ax轴)与世界坐标系的3轴ax、ay、az中的基准轴(图14a的例子中是ax轴)对齐。第一洗衣机标记部109相当于本发明的“电气设备标记部”的一个例子。
[0143]
第一洗衣机标记部109设置于壳体101。具体而言,第一洗衣机标记部109设置在特定区域p11~p52中的至少一个特定区域(在图14的例子中是特定区域p52)或其附近。第一洗衣机标记部109表示沿着洗衣机100的基准轴(ax轴)的方向。即,第一洗衣机标记部109与洗衣机100的基准轴(ax轴)大致平行。此外,监视终端标记部13表示沿着加速度传感器70的特定轴(ax轴)的方向。即,监视终端标记部13与加速度传感器70的特定轴(ax轴)大致平行。因此,用户将第一洗衣机标记部109以及监视终端标记部13作为标记,以使加速度传感器70的特定轴(ax轴)沿着洗衣机100的基准轴(ax轴)的方式,容易地将监视终端200配置在洗衣机100的特定区域p52。即,用户通过以第一洗衣机标记部109和监视终端标记部13成为大致平行的方式将监视终端200配置在洗衣机100的壳体101,能够在特定区域p52中,将加速度传感器70的特定轴(ax轴)和洗衣机100的基准轴(ax轴)设定为大致平行。
[0144]
第一洗衣机标记部109例如既可以刻印在壳体101,也可以是贴纸,还可以是涂装。并且,监视终端200也可以不具备监视终端标记部13。
[0145]
(第二变形例)参照图14b,说明本实施方式的第二变形例。在第二变形例中,说明洗衣机100具有第二洗衣机标记部110的例子。图14b是示意性表示第二变形例的洗衣机系统300的局部立体图。如图14b所示,洗衣机100在洗衣机100中具备第二洗衣机标记部110,该第二洗衣机标记部110用于使加速度传感器70的3轴ax、ay、az中的特定轴(图14b的例子中为ax轴)与世界
坐标系的3轴ax、ay、az中的基准轴(图14b的例子中为ax轴)对齐。第二洗衣机标记部110相当于本发明的“电气设备标记部”的一例。
[0146]
第二洗衣机标记部110设置在壳体101。具体而言,第二洗衣机标记部110设置在特定区域p11~p52中的至少一个特定区域(在图14b的例子中是特定区域p52)或其附近。第二洗衣机标记部110沿着洗衣机100的基准轴(ax轴)延伸。此外,第二洗衣机标记部110从壳体101突出。因此,第二洗衣机标记部110作为将监视终端200配置于洗衣机100时的引导部发挥功能。因此,用户通过将第一洗衣机标记部109以及监视终端标记部13设为标记,并且沿着第二洗衣机标记部110配置监视终端200,能够容易地将加速度传感器70的特定轴(ax轴)和洗衣机100的基准轴(ax轴)设定为大致平行。
[0147]
并且,洗衣机100也可以不具备第一洗衣机标记部109。此外,监视终端200也可以不具备监视终端标记部13。
[0148]
(第三变形例)参照图15,说明本实施方式的第三变形例。在第三变形例中,说明洗衣机100a是立式洗衣机的例子。图15是表示第三变形例所涉及的洗衣机系统300的立体图。如图15所示,洗衣机系统300具备洗衣机100a和监视终端200。洗衣机100a相当于本发明的“电气设备”的一个例子。在图15中,作为一个例子,监视终端200配置于洗衣机100a的特定区域p52。即,监视终端200的壳体11配置在洗衣机100a的特定区域p52。
[0149]
洗衣机100a与图3和图4所示的洗衣机100同样地,在洗衣机100a的上部且角部具有12个特定区域监视终端200配置在特定区域p11~p52中的任意区域。
[0150]
洗衣机100a洗涤洗涤物。洗衣机100a是立式洗衣机。在洗衣机100a中,旋转槽106和水槽105分别具有将筒体的一端部封闭的形状。旋转槽106及水槽105沿铅锤方向延伸。因此,振动vx及振动vy起因于收容有洗涤物的旋转槽106的旋转。例如,振动vx和振动vy起因于洗涤物在旋转中的旋转槽106的内部偏移。
[0151]
(第四变形例)参照图5、图6及图16,说明本发明的第四变形例。在第四变形例中,说明图5的监视终端200的传感器70是陀螺仪传感器的例子。以下,将传感器70记载为“陀螺仪传感器70”。ax轴、ay轴、az轴是陀螺仪传感器70的3轴。陀螺仪传感器70检测绕ax轴的角速度gx#、绕ay轴的角速度gy#以及绕az轴的角速度gz#。
[0152]
图16是表示利用第四变形例所涉及的监视终端200的监视方法的流程图。如图6和图16所示,首先,在步骤s11中,将监视终端200(壳体11)配置于洗衣机100的特定区域p52。
[0153]
具体而言,以陀螺仪传感器70的ax轴沿着洗衣机100的ax轴的方式,将监视终端200(壳体11)配置于特定区域p52。这点与加速度传感器的情况相同。
[0154]
在ax轴与ax轴所成的角度为约10度以内的情况下,式(8)~式(10)精度良好地成立。在ax轴与ax轴大致平行的情况下,式(8)~式(10)的精度最好。“*”表示乘法运算。“gx#”表示世界坐标系中的绕ax轴的角速度。“gy#”表示世界坐标系中的绕ay轴的角速度。“gz#”表示世界坐标系中的绕az轴的角速度。
[0155]
[数学式8]gx#=cosβ*gx#+sinα*sinβ*gy#-cosα*sinβ*gz#
…
(8)
[0156]
[数学式9]gy#=cosα*gy#+sinα*gz#
…
(9)
[0157]
[数学式10]gz#=sinβ*gx#-sinα*cosβ*gy#+cosα*cosβ*gz#
…
(10)
[0158]
接着,在步骤s12中,运算部21将洗衣机100为非运转状态时的旋转角度α0、β0存储于存储部3。旋转角度α0、β0的导出方法如上所述能够使用加速度传感器的信息。此外,也可以从水准仪等获取信息。
[0159]
运算部21通过对式(8)~式(10)的旋转角度α、β分别代入旋转角度α0、β0,导出式(11)~式(13)。控制部1将式(11)~式(13)存储于存储部3。
[0160]
[数学式11]gx#=cosβ0*gx#+sinα0*sinβ0*gy#-cosα0*sinβ0*gz#
…
(11)
[0161]
[数学式12]gy#=cosα0*gy#+sinα0*gz#
…
(12)
[0162]
[数学式13]gz#=sinβ0*gx#-sinα0*cosβ0*gy#+cosα0*cosβ0*gz#
…
(13)
[0163]
接着,在步骤s13中,运算部21从陀螺仪传感器70获取角速度gx#、角速度gy#以及角速度gz#的信息。在该情况下,在洗衣机100为运转状态的情况下,运算部21获取洗衣机100运转中由陀螺仪传感器70检测到的角速度gx#、gy#、gz#的信息。
[0164]
接着,在步骤s14中,运算部21将从陀螺仪传感器70获取的角速度gx#、gy#、gz#代入式(11),计算角速度gx#。此外,运算部21将从陀螺仪传感器70获取的角速度gy#、gz#代入式(12),计算角速度gy#。进一步,运算部21将从陀螺仪传感器70获取的角速度gx#、gy#、gz#代入式(13),计算角速度gz#。在角速度gx#、gy#、gz#是在洗衣机100的运转中由陀螺仪传感器70检测到的角速度的情况下,角速度gx#、gy#、gz#表示洗衣机100的振动。
[0165]
接着,在步骤s15中,判断部22基于角速度gx#、gy#、gz#来判断监视终端200向洗衣机100的安装状态或洗衣机100的设置状态。
[0166]
接着,在步骤s16中,运算部21基于角速度gx#、gy#、gz#来推测洗衣机100的动作状态。
[0167]
接着,在步骤s17中,通知部23通知表示洗衣机100的动作状态的动作信息。此外,通知部23也可以通过通信部9将角速度gx#、gy#、gz#的信息、即表示洗衣机100的振动的振动信息发送给服务器400。
[0168]
以上,如参照图6和图16说明的那样,根据第四变形例,壳体11以陀螺仪传感器70的3轴ax、ay、az中的1轴即ax轴(即,特定轴)沿着配置洗衣机100的世界坐标系的ax轴(即,基准轴)的方式配置在特定区域p52上。
[0169]
此外,在第四变形例中,运算部21基于校正后的旋转角度α0、β0和洗衣机100处于
运转状态时由检测部7的陀螺仪传感器70检测到的角速度gx#、gy#、gz#,计算世界坐标系中的洗衣机100的角速度gx#、gy#、gz#(振动分量)。在本变形例中,为了根据洗衣机100的角速度计算振动分量,易于识别是由洗衣机100的“运转状态”引起的振动还是来自洗衣机100的外部的冲击引起的振动。此外,通过将陀螺仪传感器70设置于盖102,可以准确地检测盖102的开关状态。
[0170]
并且,在步骤s11中,也可以以使陀螺仪传感器70的ay轴沿着洗衣机100的az轴的方式将监视终端200(壳体11)配置于特定区域p52。这点与加速度传感器的情况相同。此外,图6示出的陀螺仪传感器70的ax轴、ay轴以及az轴的配置为一个例子,在ax轴、ay轴以及az轴与ax轴、ay轴以及az轴具有与上述相同的关系的情况下,通过将式(8)~式(13)示出的旋转转换式的各轴以及符号与陀螺仪传感器70的配置相匹配地置换,同样的旋转转换式成立。
[0171]
以上,中,说明了将监视终端200配置于洗衣机100、100a的例子。但是,配置监视终端200的电气设备并不限定于洗衣机100、100a。即,监视终端200能够配置于在运转中持续产生振动的电气设备。
[0172]
[监视系统sys]参照图2,说明监视系统sys。监视终端200向服务器400发送洗衣机100的信息(例如,动作信息)。服务器400处理洗衣机100的信息,将处理结果发送到用户终端tm或监视终端200。此外,服务器400从用户终端tm接收信息。然后,服务器400处理从用户终端tm接收的信息,将处理结果发送到监视终端200。
[0173]
例如,监视终端200以后装的方式安装在现有的电气设备(例如洗衣机100)上,将电气设备的运转状态、故障状态发送给服务器400,服务器400远程监视电气设备。监视终端200不仅可以内置传感器70,也可以内置各种传感器。传感器例如是电流传感器或者环境传感器(温度、湿度、气压、照度、气体、灰尘、人感传感器等)。
[0174]
例如,在监视终端200中也能够搭载人工智能,能够将来自各种传感器的信息组合,推测并生成(1)与电气设备相关的信息(运转状态、运转历史记录、故障预知等)、(2)表示放置电气设备的状态/周边的状况的信息、(3)表示使用电气设备的用户的状态的信息。
[0175]
例如,在监视终端200中具备与服务器400进行通信的通信部9,将上述各种传感器信息、基于这些信息的推测信息通知给服务器400。通信部9符合wifi、光线路、移动线路、lpwa等。
[0176]
例如,监视终端200可以具有通知装置。通知装置向用户通知上述各种传感器信息、基于这些信息的推测信息、以及从服务器400的通知信息。通知装置是lcd、led等显示器、扬声器等声音输出部等。
[0177]
例如,监视终端200也能够具有输入显示部,(1)能够进行监视终端200的设定、与登记操作相关的指示,(2)能够进行与来自服务器400的通知信息相关的确认响应。
[0178]
例如,监视终端200的电源也能够为5v电源输入,能够应对ac适配器、usb电源、移动电池等各种电源供给。
[0179]
例如,监视终端200能够使用通信部9(有线或者无线)从外部切换控制监视终端200的固件的动作,能够变更为适于监视所安装的电气设备的动作状态的控制内容。
[0180]
例如,监视终端200能够使用通信部9(有线或者无线)从外部改写对监视终端200进行控制的固件,能够变更为适于监视所安装的电气设备的动作状态的控制内容。
[0181]
例如,服务器400具有存储从监视终端200通知的信息的存储部3。
[0182]
例如,也能够在服务器400中搭载人工智能,能够组合从监视终端200通知的信息、来自其他服务器的关联信息等,推测并生成(1)与电气设备相关的信息(运转状态、运转历史记录、故障预知等)、(2)表示放置电气设备的状态/周边的状况的信息、(3)表示使用电气设备的用户的状态的信息。
[0183]
例如,关于服务器400中累积的信息、在服务器400中推测生成的信息,利用以下这样的方法能够使用户看到或者能够进行推送通知。通过数字、文字、图等在web内容、sns内容上显示。通过邮件、sms、notificat1n等方法向用户推送通知。
[0184]
例如,服务器400具有控制监视终端200的控制部401,能够对监视终端200发送如下所述的指令指示而进行远程控制。指令是来自用户终端tm的远程操作命令、基于服务器400内的推测信息进行动作的终端控制命令。
[0185]
以上,参照附图说明了本发明的实施方式。但是,本发明并不限定于上述实施方式,在不脱离其宗旨的范围内,可以在各种方式中实施。此外,上述的实施方式中公开的多个构成要素能够适当改变。例如,既可以将某实施方式所示的全部构成要素中的某构成要素追加到其他实施方式的构成要素,或者也可以从实施方式删除某实施方式所示的全部构成要素中的几个构成要素。
[0186]
此外,附图为了容易理解发明,将各个构成要素示意性地示出为主体,从附图制作的观点出发,图示的各构成要素的厚度、长度、个数、间隔等可能与实际不同。此外,上述的实施方式所示的各构成要素的构成是一个例子,并无特别限定,能够在实质上不脱离本发明的效果的范围内进行各种变更,这是不言而喻的。产业上的实用性
[0187]
本发明能够用于监视终端的领域,具有产业上的可利用性。附图标记说明
[0188]
1控制部7 检测部21 运算部22 判断部23 通知部70 传感器(加速度传感器)100、100a 洗衣机(电气设备)200 监视终端
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1