一种无线传感器网络异常节点检测与迭代定位方法
本发明涉及一种无线传感器网络技术,尤其是涉及一种无线传感器网络异常节点检测与迭代定位方法。
背景技术:
1、无线传感器网络是由众多传感器节点以自组织方式构成的一个多跳无线网络系统。该多跳无线网络系统的主要功能为感知采集系统覆盖区域内的环境信息,进行处理后传输反馈给管理员。由于该多跳无线网络系统产生的数据量巨大且传感器节点具有有限的带宽、功率、计算能力等特点,且特别容易受到恶劣环境的影响及恶意破坏者的攻击,因此会导致该多跳无线网络系统中出现异常节点,异常节点会影响采集到数据本身的真实性和稳定性,产生异常数据,将对该多跳无线网络系统的系统服务产生巨大的影响。
2、目前,通过分析传感器节点采集的数据来检测出异常节点的方法有许多类型。如:基于统计学的方法较早被提出来,该方法检测率较高,但是需要相应的先验知识建立统计概率模型,然而在许多实际情况中,传感器节点分布的先验知识很难获得。又如:基于分类的异常传感器节点检测算法,该方法主要通过传感器节点之间的距离寻找传感器节点之间的相似度,并根据相似度对传感器节点进行分类寻找异常节点,该方法的优势是不需要统计概率模型。再如:文献discrete signal processing on graphs:frequency analysis(图上的离散信号处理:频率分析)中提出的图频域方法,该方法通过图高通滤波器提取高频分量来检测异常节点,但是该方法只能检测出无线传感器网络中是否包含异常节点,并不能检测出异常节点所在位置。还如:文章《一种新的无线传感器网络中异常节点检测定位算法》,其中提出了一种基于局部子图处理和节点域-图频域联合分析的方法,该方法将图模型划分成多个子图,再通过高通滤波器、图傅里叶变换及图傅里叶逆变换操作后,判断出疑似异常节点,将疑似异常节点与子图进行匹配,最终得到异常节点的位置,该方法可以检测并且定位,但是使用的图傅里叶变换及图傅里叶逆变换操作,大大降低了计算效率。
技术实现思路
1、本发明所要解决的技术问题是提供一种无线传感器网络异常节点检测与迭代定位方法,其能够检测出无线传感器网络中是否存在异常节点并且能够进一步准确确定异常节点的位置,其计算效率高。
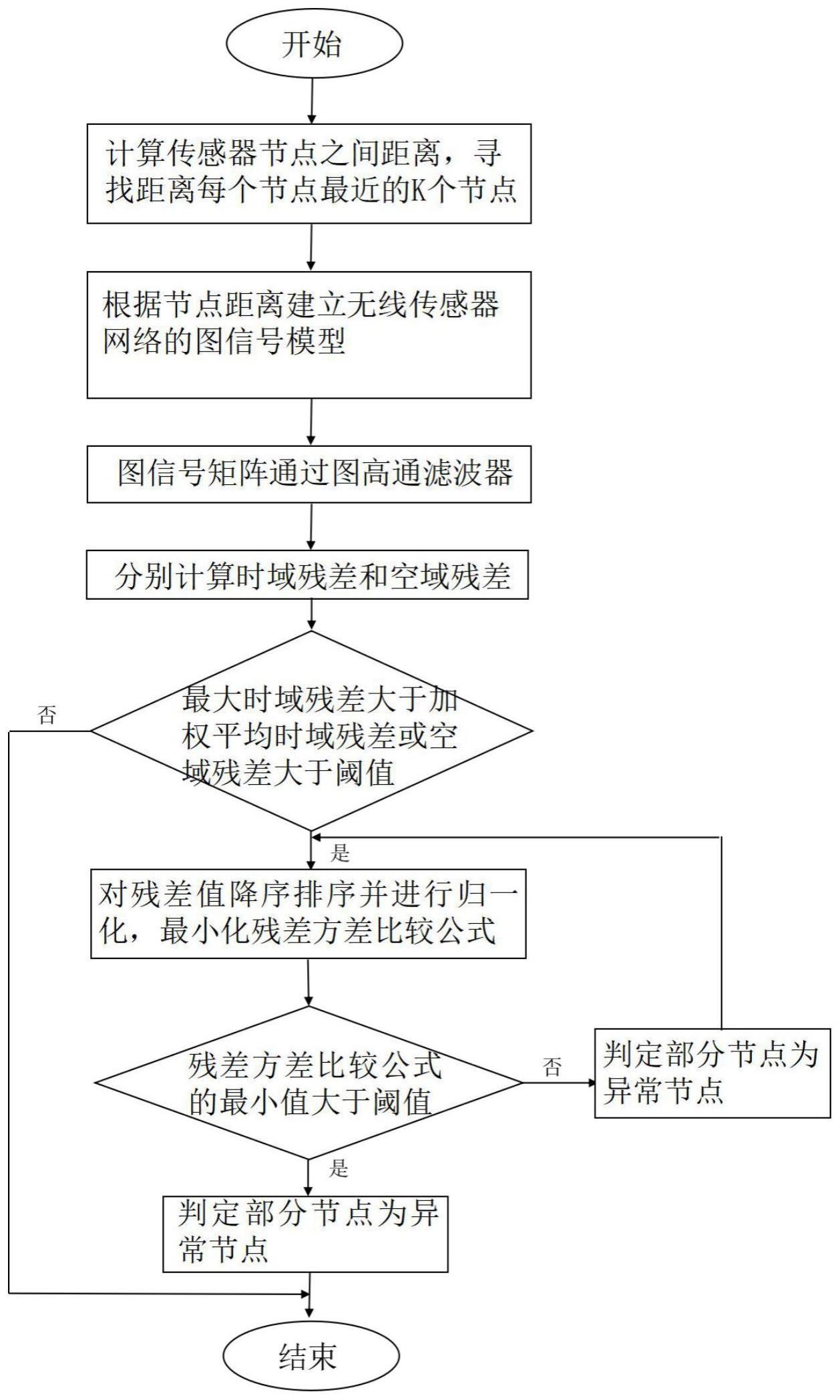
2、本发明解决上述技术问题所采用的技术方案为:一种无线传感器网络异常节点检测与迭代定位方法,其特征在于包括以下步骤:
3、步骤1:将待异常节点检测并定位的无线传感器网络定义为当前无线传感器网络,设定当前无线传感器网络具有n个传感器节点;其中,n≥6;
4、步骤2:针对当前无线传感器网络中的任一个传感器节点,将其作为当前传感器节点,首先计算当前传感器节点与除其自身外的每个传感器节点之间的欧氏距离,然后将当前传感器节点相关的n-1个欧氏距离从小到大排序,找出前k个欧氏距离对应的k个传感器节点,再在当前传感器节点与找出的每个传感器节点之间连接一条边;其中,k的值在区间[5,10]内取值,k<n;
5、步骤3:构建当前无线传感器网络的图信号模型,描述为:g=(v,e,w);其中,g表示当前无线传感器网络的图信号模型,v表示n个传感器节点构成的维数为1×n的行向量,v=[v1,v2,…vn,…,vn],v1,v2,…vn,…,vn对应表示第1个传感器节点、第2个传感器节点、…、第n个传感器节点、…、第n个传感器节点,1≤n≤n,e为维数为n×n的矩阵,e1,1、e1,j、e1,n、ei,1、ei,j、ei,n、en,1、en,j、en,n对应表示e中第1行第1列的元素、e中第1行第j列的元素、e中第1行第n列的元素、e中第i行第1列的元素、e中第i行第j列的元素、e中第i行第n列的元素、e中第n行第1列的元素、e中第n行第j列的元素、e中第n行第n列的元素,ei,j的值为0或1,当第i个传感器节点与第j个传感器节点之间不存在边时令ei,j=0,当第i个传感器节点与第j个传感器节点之间存在边时令ei,j=1,1≤i≤n,1≤j≤n,w为维数为n×n的权重矩阵,w1,1、w1,j、w1,n、wi,1、wi,j、wi,n、wn,1、wn,j、wn,n对应表示w中第1行第1列的元素、w中第1行第j列的元素、w中第1行第n列的元素、w中第i行第1列的元素、w中第i行第j列的元素、w中第i行第n列的元素、w中第n行第1列的元素、w中第n行第j列的元素、w中第n行第n列的元素,当i=j时令wi,j=0,当i≠j时令disti,j表示第i个传感器节点与第j个传感器节点之间的欧氏距离,当i≠j且第i个传感器节点与第j个传感器节点之间存在边时wi,j表示第i个传感器节点与第j个传感器节点之间的权重;
6、步骤4:获取当前无线传感器网络的图信号模型的网络拓扑结构,用维数为n×n的图拉普拉斯矩阵l来表示,l=d-w;其中,d表示维数为n×n的度矩阵,d1,1为d中第1行第1列的元素,亦为d的主对角线上的第1个元素,di,i为d中第i行第i列的元素,亦为d的主对角线上的第i个元素,dn,n为d中第n行第n列的元素,亦为d的主对角线上的第n个元素,
7、使当前无线传感器网络中的每个传感器节点采集time个时刻的数据;然后获取当前无线传感器网络的图信号矩阵,记为f,f=[f1,…,ft,…ftime-1,ftime];其中,time表示每个传感器节点采集数据的总时刻数,time>5,f的维数为n×time,f1、ft、ftime-1、ftime的维数为n×1,f1表示n个传感器节点在第1个时刻采集的数据构成的列向量,ft表示n个传感器节点在第t个时刻采集的数据构成的列向量,ft(1)表示第1个传感器节点在第t个时刻采集的数据,ft(i)表示第i个传感器节点在第t个时刻采集的数据,ft(n)表示第n个传感器节点在第t个时刻采集的数据,ftime-1表示n个传感器节点在第time-1个时刻采集的数据构成的列向量,ftime表示n个传感器节点在第time个时刻采集的数据构成的列向量,1≤t≤time;
8、步骤5:将f通过一个维数为n×n的图高通滤波器h,将滤波后得到的输出信号记为其中,的维数为n×time;
9、步骤6:在time个时刻中随机选取一个时刻作为当前时刻,设当前时刻为第g个时刻;然后将所有传感器节点在当前时刻采集的数据定义为当前数据,将所有传感器节点在第g-m个时刻至第g-1个时刻采集的数据定义为历史数据;再计算当前数据的最大时域残差,记为θ,并计算历史数据的平均时域残差,记为,计算当前数据的空域残差,记为θs,其中,5<g≤time,m取值为4或5,符号“||||∞”为无穷范数符号,表示中的第g个列向量,1≤k≤m,表示中的第g-k个列向量,1≤q≤m,1≤p≤m,q≠p,表示中的第g-q个列向量,表示中的第g-p个列向量,的维数为n×1,“()t”为转置运算;
10、步骤7:如果或θs>λ,则判定当前无线传感器网络中在当前时刻下存在异常节点,然后执行步骤8;如果且θs≤λ,则判定当前无线传感器网络中在当前时刻下不存在异常节点,结束检测过程;其中,γ为加权系数,γ∈[1.2,1.8],λ为阈值;
11、步骤8:计算然后将z中的n个值按从大到小的顺序进行排序,再将排序后得到的列向量记为ω,其中,z为引入的中间变量,对应表示ω中的第1个残差值、第2个残差值、第n个残差值、第n个残差值,
12、步骤9:令ωno表示尚未实现异常节点定位的残差值构成的集合,并令ωno的初始值为ω;令a表示正整数,并令a的初始值为1;令b表示ω中的残差值对应的异常节点构成的集合,并令b的初始值为空集;
13、步骤10:将ωno表示为然后对中的每个残差值进行归一化处理,将经归一化处理后得到的值记为将经归一化处理后得到的值记为将经归一化处理后得到的值记为将经归一化处理后得到的值记为其中,表示ωno中序号为a的残差值,表示ωno中序号为a+1的残差值,表示ωno中序号为a+2的残差值,表示ωno中序号为n的残差值,当ωno为初始值ω时即为即为即为
14、步骤11:令u表示正整数,计算u在a+1到n范围内取值的情况下使得残差方差比较公式取得最小值时u的值,将计算得到的u的值记为umin;其中,a+1≤u≤n,umin∈[a+1,n],均为残差方差,s为正整数,a≤s≤n,h为正整数,a≤h≤n,表示ωno中序号为s的残差值经归一化处理后得到的值,表示ω中的第h个残差值;
15、步骤12:判断的计算值是否大于设定阈值th,如果是,则判定中的残差值对应的传感器节点无异常,结束定位过程;否则,判定中至序号为umin-1的残差值各自对应的传感器节点异常,然后将至序号为umin-1的残差值各自对应的传感器节点加入b中,接着令a=umin,再返回步骤10进行下一次迭代;其中,a=umin中的“=”为赋值符号,均为最小残差方差,
16、所述的步骤10中,其中,表示ω中的第b个残差值。
17、所述的步骤2中,k取值为5或6。
18、所述的步骤7中,γ=1.5、λ=0.007。
19、所述的步骤12中,th的取值为-100。
20、与现有技术相比,本发明的优点在于:
21、1)本发明方法建立无线传感器网络的图信号模型,该图信号模型考虑了节点距离,在异常节点检测及定位过程中联合时域和空域的残差,使检测及定位结果更加准确。
22、2)本发明方法将图信号矩阵通过一个图高通滤波器,该滤波操作在顶点域上进行,因此在数据处理过程中不需要进行图傅里叶变换及图傅里叶逆变换操作,节省了大量的计算时间,提高了计算效率。
23、3)本发明方法通过分析历史数据及当前数据不仅可以检测出无线传感器网络中是否存在多个异常的传感器节点即异常节点,而且可以进一步准确确定异常节点的位置。
24、4)本发明方法的定位部分采用残差方差比较公式,将残差值进行降序排序,然后进行迭代处理,在每次迭代过程中,找到排序后的一个序号,将该序号之前的残差值所对应的传感器节点判定为异常节点,把其他残差值放入下一次迭代处理,直至残差方差比较公式大于设定阈值,残差方差计算简单且通过迭代操作,定位结果更加准确。
25、5)本发明方法无需传感器节点分布的先验知识。
- 还没有人留言评论。精彩留言会获得点赞!