摩托车的三维回放记录生成方法、装置、设备及存储介质与流程
本发明涉及摩托车,尤其涉及一种摩托车的三维回放记录生成方法、装置、设 备及存储介质。
背景技术:
1、为了保证安全以及取证方便,部分摩托车也配备了行车记录仪,行车记录仪具有摄像头 模块,摄像头模块够记录汽车行驶全过程的视频图像,可为交通事故提供证据。
2、然而,目前摩托车上的行车记录仪通常具备视频记录功能,但缺乏车身姿态,转向信息, 车速等信息,无法很好的还原摩托车在某一时刻的骑行记录,难以通过视频记录判断骑行过 程中骑手是否因错误姿态而导致事故。
3、因此,现有技术还有待改善。
技术实现思路
1、本发明实施例提供了一种车辆安全方法、装置、设备及存储介质,旨在解决现有技术中 摩托车的行车记录仪中缺乏摩托车姿态数据、行驶速度数据的技术问题。
2、第一方面,本发明实施例提供了一种三维回放记录生成方法,所述方法包括:
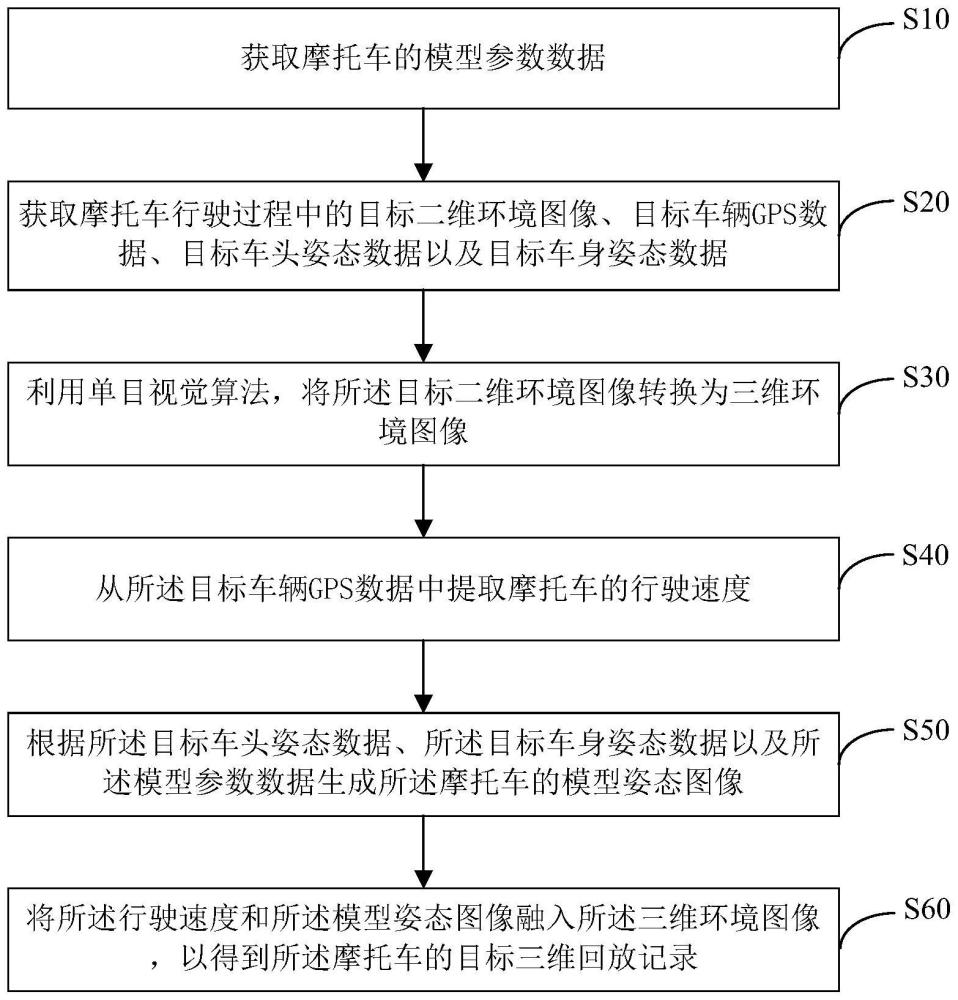
3、获取摩托车的模型参数数据;
4、获取摩托车行驶过程中的目标二维环境图像、目标车辆gps数据、目标车头姿态数据以 及目标车身姿态数据;
5、利用单目视觉算法,将所述目标二维环境图像转换为三维环境图像;
6、从所述目标车辆gps数据中提取摩托车的行驶速度;
7、根据所述目标车头姿态数据、所述目标车身姿态数据以及所述模型参数数据生成所述摩 托车的模型姿态图像;
8、将所述行驶速度和所述模型姿态图像融入所述三维环境图像,以得到所述摩托车的目标 三维回放记录。
9、在一些实施例中,所述方法还包括:
10、接收摩托车行驶过程中记录的初始二维环境图像、初始车辆gps数据、初始车头姿态数 据以及初始车身姿态数据;
11、将所述初始车辆gps数据、所述初始车头姿态数据以及所述初始车身姿态数据均以及所 述初始二维环境图像进行时间轴校对,并将校对后的初始车辆gps数据作为目标车辆gps 数据、将校对后的初始车头姿态数据作为目标车头姿态数据、将校对后的初始车身姿态数据 作为目标车身姿态数据、将校对后的初始二维环境图像作为目标二维环境图像。
12、在一些实施例中,所述方法还包括:
13、根据所述目标车头姿态数据确定第一路面坡度值;
14、根据所述目标车辆gps数据确定第二路面坡度值;
15、根据所述第一路面坡度值和所述第二路面坡度值确定目标路面坡度值;
16、将所述目标路面坡度值融入所述目标三维回放记录,得到新的三维回放记录,并将所述 新的三维回放记录作为所述目标三维回放记录。
17、在一些实施例中,所述根据所述第一路面坡度值和所述第二路面坡度确定目标路面坡度 值,包括:
18、当所述第一路面坡度值和所述第二路面坡度值之间的差值小于预设阈值时,将所述第一 路面坡度值和所述第二路面坡度值之和的均值作为所述目标路面坡度值;
19、当所述第一路面坡度值和所述第二路面坡度值之间的差值大于或等于所述预设阈值时, 利用卡尔曼滤波算法确定所述目标路面坡度值。
20、在一些实施例中,所述将所述行驶速度和所述模型姿态图像融入所述三维环境图像,以 得到所述摩托车的三维回放记录,包括:
21、确定所述三维环境图像的目标呈现位置;
22、将所述模型姿态图像中摄像头的位置与所述目标呈现位置相对应,将所述模型姿态图像 融入至所述目标呈现位置,以得到所述摩托车的初始三维回放记录;
23、将所述行驶速度融入所述初始三维回放记录,以得到所述摩托车的目标三维回放记录。
24、在一些实施例中,所述目标二维环境图像包括二维环境图像中点,所述确定所述三维环 境图像的目标呈现位置包括:
25、将所述二维环境图像中点转换为三维环境图像中点;
26、确定所述三维环境图像中点为所述目标呈现位置。
27、在一些实施例中,所述模型参数数据包括车头模型参数数据和车身模型参数数据,所述 根据所述目标车头姿态数据、所述目标车身姿态数据以及所述模型参数数据生成所述摩托车 的模型姿态图像,包括:
28、根据所述目标车头姿态数据和所述车头模型参数数据生成摩托车的车头模型姿态图像;
29、根据所述目标车身姿态数据和所述车身模型参数数据生成摩托车的车身模型姿态图像;
30、结合所述车头模型姿态图像和所述车身模型姿态图像生成所述摩托车的模型姿态图像。
31、第二方面,本发明实施例提供了一种三维回放记录生成装置,所述装置包括:
32、第一获取模块,用于获取摩托车的模型参数数据;
33、第二获取模块,用于获取摩托车行驶过程中的目标二维环境图像、目标车辆gps数据、 目标车头姿态数据以及目标车身姿态数据;
34、转换模块,利用单目视觉算法,用于将所述目标二维环境图像转换为三维环境图像;
35、提取模块,用于从所述目标车辆gps数据中提取摩托车的行驶速度;
36、生成模块,用于根据所述目标车头姿态数据、所述目标车身姿态数据以及所述模型参数 数据生成所述摩托车的模型姿态图像;
37、得到模块,用于将所述行驶速度和所述模型姿态图像融入所述三维环境图像,以得到所 述摩托车的目标三维回放记录。
38、第三方面,本发明实施例提供了一种电子设备,包括:处理器和存储器,所述存储器用 于存储计算机程序代码,所述计算机程序代码包括计算机指令,在所述处理器执行所述计算 机指令的情况下,所述处理器执行如上述任一实施例所述的方法。
39、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质中 存储有计算机程序,所述计算机程序包括程序指令,在所述程序指令被处理器执行的情况下, 使所述处理器执行如上述任一实施例所述的方法。
40、第五方面,本发明实施例还提供了一种包括指令的计算机程序产品,当其在计算机上运 行时,使得计算机执行上述任一方面所述的方法。
41、第六方面,本发明实施例提供了一种芯片系统,该芯片系统包括处理器,用于支持电子 设备实现上述方面中所涉及的功能,例如,生成或处理上述方法中所涉及的数据和/或信息。 在一种可能的设计中,所述芯片系统还包括存储介质,所述存储介质,用于保存电子设备必 要的程序指令和数据。该芯片系统,可以由芯片构成,也可以包括芯片和其他分立器件。
42、与现有技术相比,本发明实施例提供了一种摩托车的三维回放记录生成方法、装置、设 备及存储介质,所述方法包括,获取摩托车的模型参数数据;获取摩托车行驶过程中的目标 二维环境图像、目标车辆gps数据、目标车头姿态数据以及目标车身姿态数据;利用单目视 觉算法,将所述目标二维环境图像转换为三维环境图像;从所述目标车辆gps数据中提取摩 托车的行驶速度;根据所述目标车头姿态数据、所述目标车身姿态数据以及所述模型参数数 据生成所述摩托车的模型姿态图像;将所述行驶速度和所述模型姿态图像融入所述三维环境 图像,以得到所述摩托车的目标三维回放记录。在本实施例中,由于摩托车的目标三维回放 记录中具备目标二维环境图像、目标车辆gps数据、目标车头姿态数据以及目标车身姿态数 据,因此有助于在摩托车发生事故时更好的判断事故发生原因,同时有助于骑手进行纠错, 避免骑手因骑行姿态、骑行速度不规范而导致事故发生,使得骑手在下次骑行时能够规避类 似错误。
- 还没有人留言评论。精彩留言会获得点赞!