一种静止状态下基于移动窗信号处理的SAWKNN室内定位方法
一种静止状态下基于移动窗信号处理的sawknn室内定位方法
技术领域
1.本发明设计一种静止状态下基于移动窗信号处理的sawknn室内定位方法,该方法通过利用定位过程中存在的静止状态,利用移动窗信号处理方法加强位置指纹稳定性,再结合sawknn算法进行定位,属于定位技术和智能感知与信息处理领域
背景技术:
2.目前,近年来随着移动终端的发展,基于位置服务(location-based service, lbs)的需求得到了爆炸性增长,lbs的相关应用已经成为工业生产和日常生活中不可或缺的一部分。用于室外定位的全球定位导航系统(gps)和北斗导航定位系统已经十分完善和成熟了,能以较低廉的价格提供较高的精度。所以最常见的地图导航,公交车位置实时播报、共享车辆指定的租借归还位置等lbs都是基于gps或北斗导航定位系统来开发应用的。伴随着5g网络和物联网等技术的发展,室内定位的需要也呈现了爆发式增长。
3.gps等系统其所依赖的卫星信号很容易被建筑物等墙体阻挡,导致在室内环境中定位精度会大打折扣,在室内定位应用中存在很大的局限性。由此各种室内定位技术得到了广泛研究,其中wifi室内定位技术是近年来得到了最广泛关注和研究的室内定位技术之一。其优势在于,如今wifi设备具有部署广、价格低、覆盖范围广等特点,且绝大多数的移动终端设备都自带了wifi模块,具有普适性。并且移动终端设备不需要搭载额外的硬件,仅根据无线网络中的无线信号即可实现定位,与其他定位技术相比成本最为廉价。
4.基于wifi的室内定位技术又分为基于位置指纹的方法,基于到达角度的方法以及基于到达时间的方法,其中基于到达角度与到达时间的方法都需要部署额外的硬件,开销大,没有得到太多的关注。目前使用的最多的是基于位置指纹的定位方法。本专利也是采用基于位置指纹的室内定位方法。
技术实现要素:
5.本发明利用定位中的静止状态,提高了位置指纹的稳定性,改善了现有定位算法的较大定位误差,提供了一种静止状态下基于移动窗信号处理的sawknn 室内定位方法,在真实复杂的室内环境中,能够提供更准确的定位精度。
6.为解决上述的技术问题,本发明采用的方案如下:
7.第一步:通过在提前在需要定位的室内环境中部署好坐标系、参考点、ap 设备,并记录参考点的坐标和ap设备的mac地址;
8.第二步:在部署好的所有参考点上使用移动终端进行连续多次的位置指纹采集和记录工作;
9.第三步:对记录的指纹信号进行处理,先对异常指纹信号进行预处理,再将正常的指纹信号取均值并建成离线数据库;
10.第四步:移动终端开启定位请求后将开始进行在线阶段位置指纹的采集工作,接下来将利用移动终端在静止状态下所采集的位置指纹:
11.第五步:先采用移动窗方法进行处理,大幅度提升位置指纹稳定性,再利用均值累计法进一步加强位置指纹的稳定,然后计算在线指纹与离线数据库各参考点指纹的相似度差异dif;
12.第六步:将dif结合sawknn算法中的自适应方法实现k值的求解,再通过在线数据与离线数据中相似度差异最小的k个参考点,使用sawknn算法求得定位坐标,实现定位。
13.采用基于移动窗的方法进行信号处理的具体过程如下:
14.第一步,对于在线定位阶段中在静止状态下连续采集l次指纹信号时,将前 l次采集到的信号作为旧窗口。
15.第二步,当在静止状态下处于第l+1次信号采集时,将舍弃旧窗口中最先采集到的信号作为中间过渡窗口。
16.第三步,将静止状态下采集到的第l+1次指纹信号与过渡窗口中其他指纹信号求和平均后得到令其作为新指纹添加到过渡窗口中得到新窗口。
17.第四步,将新窗口中的与新窗口中其他信号再次求和后去均值,得到稳定性更强的信号其作为新的指纹以此来替代窗口的原始信号。
18.第五步,当移动窗完成信号处理后的基础上采用了信号累积平均的方法得到使得位置指纹进一步提升稳定性并令其作为在线阶段的位置指纹。
19.采用sawknn求k值并实现定位的具体过程如下:
20.第一步,位置指纹经过前期数据处理后,计算在线阶段指纹信号与离线数据库中各参考点之间指纹信号的相似度差异其表示在线阶段中第r时刻所在位置与第j个参考点之间的差异,‖‖1为曼哈顿距离;
21.第二步,通过sawknn算法中信号相似度差异dif
r,j
与两者之间的距离d
r,j
在很大的概率上保持着一致性的思想,利用自适应算法求取k值。
22.第三步,选择离线指纹中与在线位置指纹相似度差异最小的k个参考点,利用sawknn算法完成定位,定位结果为 loc(x
l
,y
l
)为选中的k个参考点中第l的位置坐标。ω
l
表示该参考点位置的权值,设置为1/dif
r,l
。
23.本发明的有益效果是:
24.合理的应用了定位过程中常被忽略的静止状态;
25.利用基于移动窗的信号处理方法,对在线阶段采集的指纹信号实现了稳定性的提升,加强了在线阶段位置指纹的稳定性;
26.利用sawknn算法,使用k值的自适应调节思想,实现了最佳的k值在不同环境下取值不同的情况;
27.最后将移动窗处理后的信号和求取的k值利用sawknn算法求解最后的定位结果,定位结果显示静止状态下基于移动窗信号处理的sawknn室内定位方法比单独使用wknn算法和sawknn算法有着更高的定位精度。
附图说明
28.图1为本发明提供的一种静止状态下基于移动窗信号处理的sawknn室内定位方法中移动窗处理位置指纹方法图。
29.图2为在静止状态下未进行移动窗信号处理的rssi。
30.图3为在静止状态下进行移动窗信号处理后的rssi。
31.图4为本发明提供的一种静止状态下基于移动窗信号处理的sawknn室内定位方法系统框架图。
具体实施方式
32.图1为本发明提供的一种静止状态下基于移动窗信号处理的sawknn定位方法中采用移动窗来处理位置指纹。如图1所示,方法包括:先将在线阶段连续采集l次的指纹信号作为旧窗口,再将最先接收到的位置指纹信号舍弃后作为中间状态,最后将新接收到的位置指纹加入到窗口后经过均值处理成为新窗口。从而达到提升位置指纹稳定性的效果。
33.具体步骤如下:
34.步骤1,在提前部署好的室内环境中先进行离线数据库的采集,令rss
i,j
为从第i
th
ap在j
th
参考点处收集rssi的平均数,其中ap的总数为n。在j
th
参考点能接收到的rssi指纹向量表示为
35.步骤2,如图1所示的测试阶段中,在静止状态下基于移动窗的信号处理方法由三个部分组成。第一部分在静止状态下的测试阶段处于第k+l-1次信号采集时,将对第k次到第k+l-1次采集到来自第i个ap的信号作为旧窗口。
36.步骤3,第二部分,当在静止状态下处于第k+l次信号采集时,将舍弃旧窗口中第k次采集到的信号以此作为过渡窗口。
37.步骤4,第三部分,将静止状态下采集到的第k+l次指纹信号与窗口中其他指纹信号进行取均值处理得到指纹信号进行取均值处理得到令其作为新指纹添加到过渡窗口中得到新窗口。其中 num(n)i代表的是当第n次信号采集时第i个ap信号是为有效信号,在采集信号时将无法收到的信号记为-100db。
38.步骤5,再将实现进一步更新,得到更加平滑的信号为移动窗下信号预处理后i
th
ap在第k+l次采集的rssi,将其作为新的以此来替代原始信号。
39.步骤6,接下来在静止状态下预处理信号后的基础上采用了信号累积平均的方法得到使得位置指纹进一步提升稳定性。其中为静止状态下信号预处理后第i个ap在第s信号采集后得到的rssi。 cnt为当前静止状态下连续累积的测试次数。
40.图2为在静止状态下未进行移动窗信号处理的rssi。图中展示的是从数十个ap信号中随机挑选5个ap,其在静止状态下连续采集100次位置指纹的信号强度。图中表明,即使在静止状态下连续时间段采集的rssi也有较大的波动。
41.图3展示的是静止状态下进行移动窗信号处理后的rssi。将处理后的信号在信号
稳定性方面得到了大幅度的提升。
42.图4为本发明提供的一种静止状态下基于移动窗信号处理的sawknn定位方法系统框架图。如图4所示,整个包括移动终端发起定位请求,移动终端在在线阶段进行信号采集。再利用移动窗和均值累法进行指纹信号的处理,然后计算当前位置指纹与离线库中各位置指纹的相似度。根据计算出来的相似度利用 sawknn算法求出k值,最后实现定位。
43.具体步骤如下:
44.步骤1,当移动终端发起定位请求,移动终端将会进行指纹信号采集工作。并进行相应的记录。
45.步骤2,若在静止状态下记录的位置指纹满足移动窗的窗口处理条件,将对位置指纹进行如图1所示的数据处理,再将处理后的指纹利用均值累计法进一步提升位置指纹的稳定性。
46.步骤3,令在r
th
测试点接收到的rssi指纹向量表示为表示为计算在线阶段的测试点与离线数据库中各参考点之间的指纹相似度,相似度可以表示为其中‖ ‖1代表的是曼哈顿距离,分子定义为j
th
参考点和r
th
测试点之间的曼哈顿距离pi是受到n个ap影响,维数为[1*n]的行向量。
[0047]
步骤4,参考点与测试点间的信号强度差异dif
r,j
与两者之间的距离d
r,j
在很大的概率上保持着一致性。1)若dif
r1,o
<dif
r2,o
则d
r1,o
《d
r2,o
;2)若 dif
r1,o
≈dif
r2,o
则d
r1,o
≈d
r2,o
。
[0048]
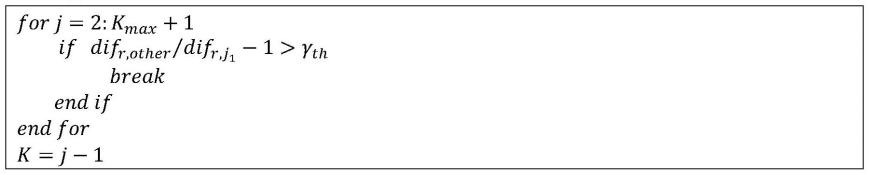
步骤5,利用式(1)通过自适应算法计算k值,γ表示两对dif之间的相似程度,γ
th
表示相似的两对dif之间所设置的阈值。k值的大小由算法1计算得出。
[0049][0050]
算法1:
[0051][0052]
步骤6,选择k个参考点位置指纹与在线阶段位置指纹的相似度dif
r,j
最接近的坐标,利用sawknn算法实现定位,定位结果为loc
′
(xr,yr),其表示为loc(x
l
,y
l
)表为第l个参考点的位置坐标。ω
l
表示该参考点位置的权值,设置为1/dif
r,l
。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1