一种支持深度学习的人工智能巡检机器人的制作方法
1.本发明涉及巡检机器人技术领域,尤其涉及一种支持深度学习的人工智能巡检机器人。
背景技术:
2.深度学习是机器学习领域中一个新的研究方向,它被引入机器学习使其更接近于最初的目标——人工智能,深度学习是学习样本数据的内在规律和表示层次,这些学习过程中获得的信息对诸如文字,图像和声音等数据的解释有很大的帮助。它的最终目标是让机器能够像人一样具有分析学习能力,能够识别文字、图像和声音等数据。深度学习是一个复杂的机器学习算法,在语音和图像识别方面取得的效果,远远超过先前相关技术。深度学习在搜索技术,数据挖掘,机器学习,机器翻译,自然语言处理,多媒体学习,语音,推荐和个性化技术,以及其他相关领域都取得了很多成果。深度学习使机器模仿视听和思考等人类的活动,解决了很多复杂的模式识别难题,使得人工智能相关技术取得了很大进步。
3.目前,国内电力行业机房巡检依然采用人工巡检方式,即通过值班人员定时检查设备状态、机房环境状态,以及通过i6000等监控系统对信息系统进行状态监控,显然这种方式存在信息获取滞后、信息共享性差、人员易懈怠、人工记录数据可能不准确等问题。若能将深度学习构建的神经网络与系统巡检时通过传感器对设备敏感部位的信号采集的数据相结合,对系统运行状态进行监测和发现异常情况后对故障进行分析、诊断,以实现信息和资源的共享,可加快异常信息的解决效率,通常使用到巡检机器人对机房进行实时巡查,巡检机器人上通常配备有摄像头,但长期使用会导致摄像头镜头布满灰尘,导致采集的图像不清晰,造成采集的数据产生误差,因此,现提供一种支持深度学习的人工智能巡检机器人。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种支持深度学习的人工智能巡检机器人,通过提供的支持深度学习工作原理的人工智能机房巡检机器人保障机房的稳定运行,且利用清扫模块处理巡检机器人摄像头上的灰尘,避免镜头布满灰尘造成采集的图像不清晰,有效的避免采集数据产生误差,克服了现有技术的不足,有效的解决了现有的巡检机器人长期使用会导致摄像头镜头布满灰尘,导致采集的图像不清晰,造成采集的数据产生误差的问题。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种支持深度学习的人工智能巡检机器人,包括车体,所述车体上设置有行走模块,图像采集模块、环境采集模块、清扫模块、机器人主控模块、网络模块、照明模块、控制面板模块、报警模块、定位模块和电源模块;
7.所述图像采集模块为安装在车体前部的摄像头,通过摄像头实现采集环境图像;
8.所述清扫模块包括安装在车体前部两侧的端板,两块所述端板之间通过轴承安装
有螺纹杆,其中一块端板上安装有伺服电机,伺服电机的输出轴一端与螺纹杆的一端传动连接,螺纹杆上螺接有清扫杆,清扫杆朝向摄像头的一侧安装有擦拭棉条,两块端板之间安装有导向杆,导向杆插接在清扫杆的顶部与清扫杆形成滑动配合;
9.所述行走模块,图像采集模块、环境采集模块、清扫模块、网络模块、照明模块、控制面板模块、报警模块、定位模块和电源模块均与机器人主控模块相连。
10.机器人主控模块包括数据处理单元、数据存储单元、数据传输模块,数据处理单元包括操作系统、智能学习系统、路径导航系统;
11.网络模块由wifi模块和5g模块组成。
12.优选的,所述智能学习系统由机器学习、状态分析、历史状态对比在内的多个子模块组成。
13.优选的,所述图像采集模块将采集的数据存储在机器人主控模块的数据存储单元中。
14.优选的,所述环境采集模块包括安装在车体上的温度传感器、湿度传感器、距离传感器、烟雾传感器、热成像仪。
15.优选的,所述定位模块为gps定位器。
16.优选的,所述机器人主控模块控制行走模块进行前进、后退和转弯。
17.优选的,所述控制面板模块包括显示屏和操作按键,用于使用者对巡检机器人进行参数的设定。
18.优选的,所述报警模块为发现异常进行报警的装置,报警模块与网络模块相连用于将异常信息发送到管理人员的使用的移动终端上。
19.优选的,所述机器人主控模块、电源模块和网络模块均安装与车体内部,所述车体的内壁一侧安装有降温风扇。
20.优选的,所述车体的顶端安装有顶盖,所述控制面板模块安装在顶盖的顶端,所述车体的顶端两侧均安装有把手。
21.本发明的有益效果为:
22.1、通过伺服电机驱动螺纹杆进行转动,继而使得清扫杆沿着螺纹杆的轴向来回移动,利用擦拭棉条对摄像头的镜头进行擦拭,避免镜头布满灰尘造成采集的图像不清晰,有效的避免采集数据产生误差。
23.2、本发明提供的支持深度学习工作原理的人工智能机房巡检机器人完成的功能包括行走、收集机房内告警、收集机房内环境数据、数据传输;本巡检机器人巡检流程:按照巡检路线、周期执行巡检,定期收集温度、湿度、等机房环境数据,用于分析机房的环境情况,保障机房的稳定运行。
24.综上所述,通过提供的支持深度学习工作原理的人工智能机房巡检机器人保障机房的稳定运行,且利用清扫模块处理巡检机器人摄像头上的灰尘,避免镜头布满灰尘造成采集的图像不清晰,有效的避免采集数据产生误差。
附图说明
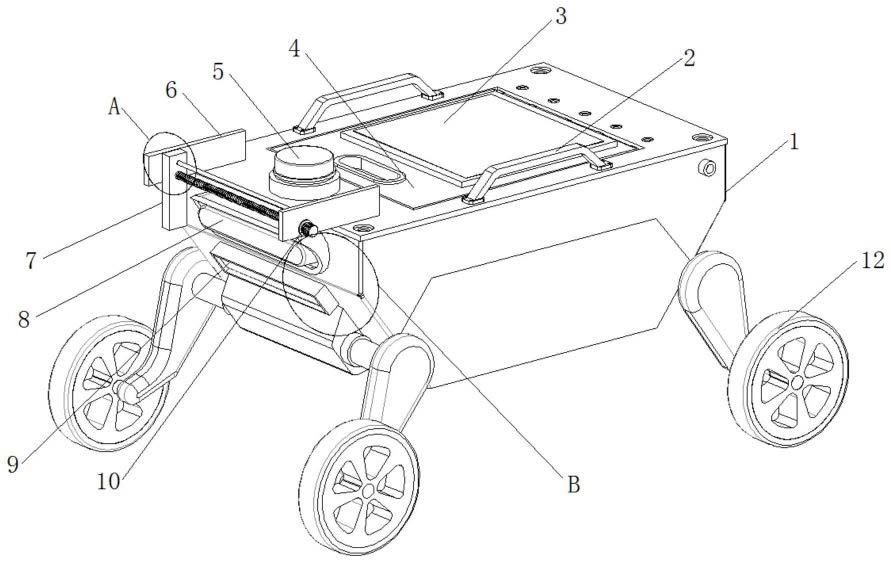
25.图1为本发明提出的一种支持深度学习的人工智能巡检机器人的第一视角的立体结构示意图。
26.图2为本发明提出的一种支持深度学习的人工智能巡检机器人的第二视角的立体结构示意图。
27.图3为本发明提出的一种支持深度学习的人工智能巡检机器人的图1中a处放大结构示意图。
28.图4为本发明提出的一种支持深度学习的人工智能巡检机器人的图1中b处放大结构示意图。
29.图中:1、车体;2、把手;3、控制面板模块;4、顶盖;5、报警模块;6、端板;7、清扫杆;8、图像采集模块;9、照明模块;10、伺服电机;11、螺纹杆;12、行走模块;13、机器人主控模块;14、电源模块;15、降温风扇;16、网络模块;17、导向杆。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
31.实施例1,参照图1-4,一种支持深度学习的人工智能巡检机器人,包括车体1,车体1上设置有行走模块12,图像采集模块8、环境采集模块、清扫模块、机器人主控模块13、网络模块16、照明模块9、控制面板模块3、报警模块5、定位模块和电源模块14;
32.图像采集模块8为安装在车体1前部的摄像头,通过摄像头实现采集环境图像;
33.清扫模块包括安装在车体1前部两侧的端板6,两块端板6之间通过轴承安装有螺纹杆11,其中一块端板6上安装有伺服电机10,伺服电机10的输出轴一端与螺纹杆11的一端传动连接,螺纹杆11上螺接有清扫杆7,清扫杆7朝向摄像头的一侧安装有擦拭棉条,两块端板6之间安装有导向杆17,导向杆17插接在清扫杆7的顶部与清扫杆7形成滑动配合;
34.通过伺服电机10驱动螺纹杆11进行转动,继而使得清扫杆7沿着螺纹杆11的轴向来回移动,利用擦拭棉条对摄像头的镜头进行擦拭,避免镜头布满灰尘造成采集的图像不清晰,有效的避免采集数据产生误差。
35.行走模块12,图像采集模块8、环境采集模块、清扫模块、网络模块16、照明模块9、控制面板模块3、报警模块5、定位模块和电源模块14均与机器人主控模块13相连。
36.通过机器人主控模块13控制行走模块12,图像采集模块8、环境采集模块、清扫模块、网络模块16、照明模块9、控制面板模块3、报警模块5、定位模块和电源模块14进行工作。
37.机器人主控模块13包括数据处理单元、数据存储单元、数据传输模块,数据处理单元包括操作系统、智能学习系统、路径导航系统;
38.网络模块16由wifi模块和5g模块组成,通过网络模块16便于向管理人员的终端设备发送数据。
39.智能学习系统由机器学习、状态分析、历史状态对比在内的多个子模块组成。
40.通过智能学习系统于统计巡检机器人本体1采集的各类数据。基于深度学习机制,对巡检机器人本体1输入数据进行无监督的特征学习,将学习到的特征作为现有分类模型的输入。特征学习包括两个阶段,首先是模型的训练阶段,模型的训练包括特征学习模型和分类模型的训练,其中数据预处理对输入的数据进行标准化和归一化处理,并完成数据类型的转换。特征学习模型的训练以经过预处理的无标签数据作为输入,对特征学习模型进行无监督的训练。训练好的特征学习模型,可以直接用于学习数据的特征,将样本在原空间
的标识变换到一个新的特征空间。分类模型的训练和测试应用有标签的训练集和测试集进行有监督的训练和测试。分类模型采用神经网络的异常检测分类算法。第二阶段为异常检测阶段,将巡检机器人采集的数据进行预处理,然后应用第一阶段训练得到的特征学习模型,学习待分类数据的特征,最后将学习到的数据特征作为分类模型的输入,对数据进行分类。将深度学习神经网络反馈的数据进行信息处理后,将结果反馈到巡检机器人的训练模型,识别异常信息并进行告警提示。
41.图像采集模块8将采集的数据存储在机器人主控模块13的数据存储单元中。
42.环境采集模块包括安装在车体1上的温度传感器、湿度传感器、距离传感器、烟雾传感器、热成像仪。
43.通过温度传感器和湿度传感器分别采集机房的温度和湿度,烟雾传感器用于火灾监控。
44.定位模块为gps定位器,便于管理人员通过移动终端实时跟踪机器人的位置。
45.机器人主控模块13控制行走模块12进行前进、后退和转弯,便于机器人进行行走。
46.控制面板模块3包括显示屏和操作按键,用于使用者对巡检机器人进行参数的设定。
47.报警模块为发现异常进行报警的装置,报警模块与网络模块相连用于将异常信息发送到管理人员的使用的移动终端上。
48.机器人主控模块13、电源模块14和网络模块16均安装与车体内部,车体1的内壁一侧安装有降温风扇15。
49.车体1的顶端安装有顶盖4,控制面板模块3安装在顶盖4的顶端,车体1的顶端两侧均安装有把手2,方便搬运机器人。
50.本发明提供的支持深度学习工作原理的人工智能机房巡检机器人完成的功能包括行走、收集机房内告警、收集机房内环境数据、数据传输;本巡检机器人巡检流程:按照巡检路线、周期执行巡检,定期收集温度、湿度、等机房环境数据,用于分析机房的环境情况,保障机房的稳定运行。
51.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1