一种柔性太阳翼表面自动拍照装置及拍照方法与流程
本发明涉及自动拍照装置及方法领域,特别涉及一种柔性太阳翼表面自动拍照装置及拍照方法。
背景技术:
1、大型柔性太阳电池翼是空间站的关键产品之一,其制造质量直接影响柔性翼的在轨可靠性和使用寿命。柔性太阳电池翼需要组装、焊接、黏贴大量的太阳电池片、电池电路、琴铰、扁平板间电缆等关键零部件,由于制造流程复杂、转运环节多,在部件生产、部装及总装、地面试验等研制过程中极易造成上述关键零部件存在制造异常点(缺陷)或局部损伤,会使产品性能下降,严重时会导致基板组件报废,造成极大的经济损失。
2、目前产品在装配和试验过程中,需要对柔性翼上电池片、电池电路、琴铰、扁平板间电缆等关键部位的装配质量和外观状态进行准确、清晰、规范的的监测、记录。而电池片数量巨大(单边阵中电池片约2万余片),琴铰、扁平电缆、电池电路等种类多、结构微小,原来采用传统人工拍照和判别的方式,准确度低,耗时长、效率低下,容易出现错、漏检的情况,直接影响产品的装配和试验质量。
3、因此,随着空间站三种柔性翼的全面研制和转阶段生产,迫切需要研制产品外观质量拍照记录的自动化装备,具备自主图像识别功能,实现柔性翼电池片、电池电路、琴铰、扁平板间电缆等关键部位装配质量的快速拍摄和自动判读,保证产品装配质量,提高检测效率,满足型号产品研制生产需要。
技术实现思路
1、本发明的目的在于提供一种柔性太阳翼表面自动拍照装置及拍照方法,以实现柔性太阳翼产品外观质量自动拍照与记录。
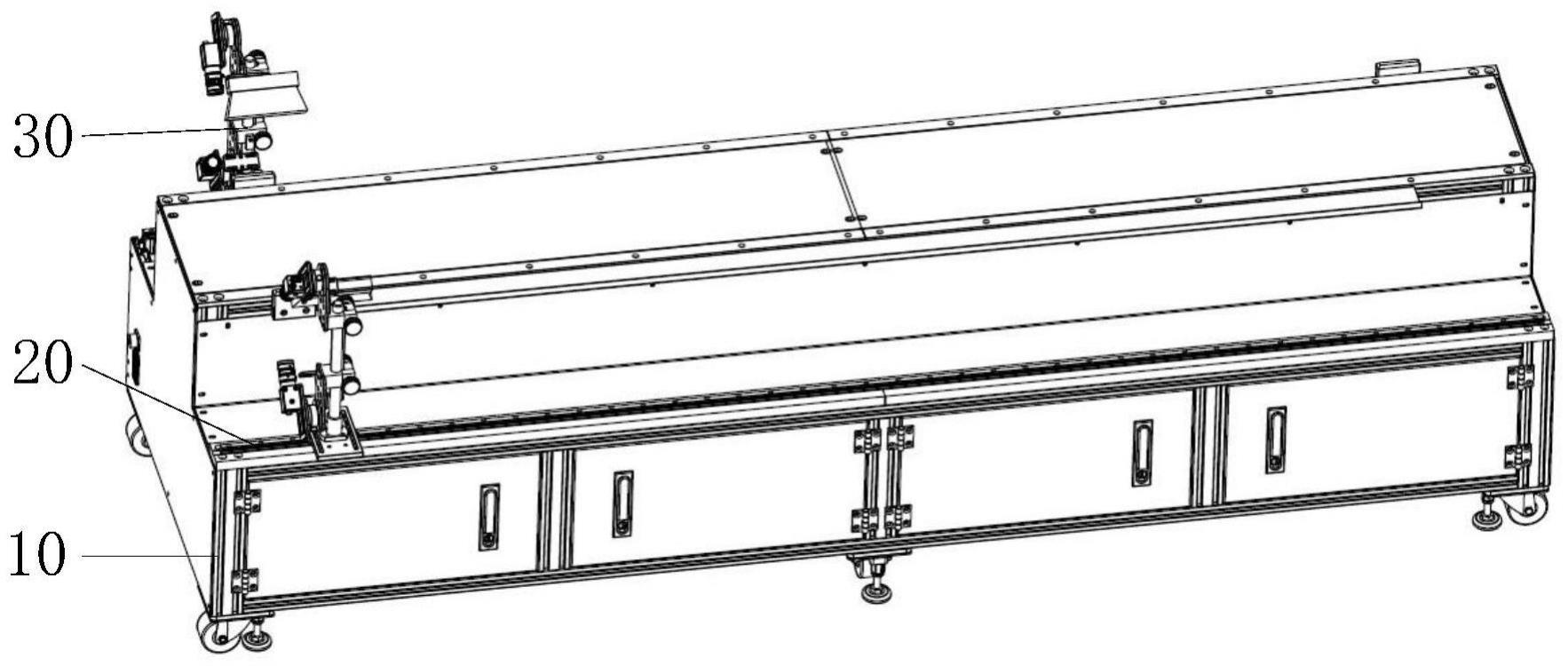
2、为了达到上述技术效果,本发明的技术方案是:提供一种柔性太阳翼表面自动拍照装置,由支撑组件、运动组件、成像组件和电控系统组成;
3、所述运动组件固定在所述支撑组件上,所述成像组件固定在所述运动组件上并能够线性运动;所述电控系统与所述运动组件和成像组件电连接;
4、所述支撑组件为框架结构,便于移动;
5、所述运动组件用于驱动两套成像组件的同步运动,实现对产品表面的全覆盖;
6、所述成像组件用于对产品表面进行相应角度拍照;
7、所述电控系统用于控制设备运行、图像采集、存储及查看。
8、进一步的,所述支撑组件由支撑框架、外封板、滚轮组件、安装平台及限位块组成;
9、所述支撑框架选用标准铝型材拼接而成,各口处采用标准螺栓或角码连,四周设置有所述外封板的安装接口,下端设置有所述滚轮组件的安装接口,上端设置有所述安装平台及所述滑轨的安装接口;
10、所述外封板安装在所述支撑框架的四周,成像背景处局部黑色喷漆,避免成像反光;
11、所述滚轮组件安装在所述支撑框架的底部,自带顶升装置,移动到位后离地固定设备;
12、所述安装平台安装在支撑框架上端面,用于放置被测产品,两侧设置有所述限位块的安装接口;
13、所述限位块安装在所述安装平台的两侧,用于固定产品位置,防止极端环境下滑块脱落滑轨。
14、进一步的,所述运动组件由电机、同步轮、同步带、连接组件、滑轨及接近传感器组成;
15、所述电机为带有码盘的步进电机,实现高精度的位置控制;
16、所述同步轮及所述同步带设置有两组,为根据被测产品拍照范围选用的成熟工业产品;
17、所述连接组件两端分别设置有与同步带、滑轨配合的接口,实现将电机的转动转换为滑块的在滑轨上移动,同时上端面设置有所述成像组件的安装接口;
18、所述滑轨选用方法兰型直线滑轨,用来实现所述成像组件在一维方向运动;
19、所述接近传感器安装在所述滑轨的一端,用于所述成像组件的到位保护。
20、进一步的,所述成像组件由安装座、安装杆、相机、固定组件、调节机构及光源组成;
21、所述安装座设置有u型孔,安装在所述连接组件上端面,用于实现所述成像组件水平的移动调节,同时设置有安装杆的固定接口;
22、所述安装杆与所述安装座紧固连接,设置有所述调节机构的安装孔;
23、所述相机为选用的高清彩色工业相机,安装在所述固定组件上;
24、所述固定组件设置有两套,安装在所述调节机构上,实现被测产品上下表面的同时拍照,设置有所述相机和所述光源的安装u型孔,便于相机与光源的角度微调;
25、所述调节机构安装在所述安装杆上,竖直方向任意位置通过螺栓进行固定,实现所述相机在竖直方向上的位置调节;
26、所述光源为可调节的工业环形光源,避免集中照明引起的明显反光,安装在所述固定组件上。
27、进一步的,所述电控系统具有任务规划、运动控制、图像采集、数据管理及数据查看功能,用于设置所述成像组件的运动轨迹、所述相机的参数,实现产品全表面的自动拍照、图像存储及查看。
28、本发明的另一个技术方案提供一种柔性太阳翼表面自动拍照方法,包括如下步骤:
29、s1、自动拍照装置上电,开启控制计算机,打开检测软件,点击相机自动复位;
30、步骤2:将待检测产品放上安装平台,通过两侧限位块调整保证限位块与被测产品贴合;
31、步骤3:通过成像组件的调节机构及固定组件上的u型孔,调整相机及光源角度,确保成像效果清晰;
32、步骤4:启动检测软件,电机驱动同步带带动成像组件在滑轨上运动,对被检测产品表面进行拍照,并按位置、时间进行自动存储;
33、步骤5:成像组件运动到接近传感器触发后,完成拍照任务,电机归零,相机复位。
34、进一步的,所述步骤s4中,拍照过程中,被检测产品保持不动,成像组件运动,实现产品上、下两表面的自动拍照。
35、进一步的,通过驱动所述电机带动所述成像组件,实现产品特定位置的再次拍照确认。
36、本发明提供的柔性太阳翼表面自动拍照装置及拍照方法取得的有益效果是:
37、本发明提出的自动拍照装置系统简单,操作流程简便。通过相机及光源位置的微调,实现了被测产品表面的全覆盖、多角度的自动拍照,同时通过电控系统的设置,实现图像的结构化的存储,便于检查与确认,解决了柔性太阳电池翼表面关键零部件检查、拍照效率低的问题。
技术特征:
1.一种柔性太阳翼表面自动拍照装置,其特征在于,由支撑组件、运动组件、成像组件和电控系统组成;
2.如权利要求1所述的柔性太阳翼表面自动拍照装置,其特征在于,所述支撑组件由支撑框架、外封板、滚轮组件、安装平台及限位块组成;
3.如权利要求2所述的柔性太阳翼表面自动拍照装置,其特征在于,所述运动组件由电机、同步轮、同步带、连接组件、滑轨及接近传感器组成;
4.如权利要求2所述的柔性太阳翼表面自动拍照装置,其特征在于,所述成像组件由安装座、安装杆、相机、固定组件、调节机构及光源组成;
5.如权利要求1所述的柔性太阳翼表面自动拍照装置,其特征在于,所述电控系统具有任务规划、运动控制、图像采集、数据管理及数据查看功能,用于设置所述成像组件的运动轨迹、所述相机的参数,实现产品全表面的自动拍照、图像存储及查看。
6.一种柔性太阳翼表面自动拍照方法,应用于如权利要求1到5中任一项所述的柔性太阳翼表面自动拍照装置,其特征在于,包括如下步骤:
7.如权利要求6所述的柔性太阳翼表面自动拍照方法,其特征在于,所述步骤s4中,拍照过程中,被检测产品保持不动,成像组件运动,实现产品上、下两表面的自动拍照。
8.如权利要求6所述的柔性太阳翼表面自动拍照方法,其特征在于,通过驱动所述电机带动所述成像组件,实现产品特定位置的再次拍照确认。
技术总结
本发明公开了一种柔性太阳翼表面自动拍照装置及方法,设备包含支撑组件、运动组件、成像组件及电控系统。其中,支撑组件为框架结构,用于安装运动组件及成像组件。运动组件由电机、同步轮、同步带及滑轨滑块等组成,用于驱动两套成像组件的同步运动,实现对产品表面的全覆盖。成像组件主要由相机、光源及调节机构组等成,用于对产品表面进行相应角度拍照。电控系统用于控制设备运行、图像采集及存储。使用方法为:检测设备上电,相机复位;安装产品并限位固定;调整相机及光源角度;启动拍照软件,实现被检测产品表面自动拍照;完成拍照任务后电机归零,相机复位。本发明设备系统简单,操作流程简便,实现被测产品全表面、多角度的自动拍照。
技术研发人员:王兵,皮刚,施祥玲,李磊,杨帆
受保护的技术使用者:上海航天设备制造总厂有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!