基于自动驾驶车辆的相机触发方法和设备与流程
本技术涉及自动驾驶车辆,尤其涉及一种基于自动驾驶车辆的相机触发方法和设备。
背景技术:
1、在自动驾驶车辆的行驶过程中,需要获取自动驾驶车辆的周围行驶信息,以保证自动驾驶车辆的自动行驶。通过自动驾驶车辆中的激光雷达和多个相机获取信息,并对激光雷达和多个相机各自所获取的信息进行数据融合,以得到周围行驶信息;为了保证激光雷达和相机之间的数据融合的准确性,需要对激光雷达和相机进行时间同步。在进行时间同步的过程中,需要确定出每一相机进行每一次图像采集的触发信号的信号发送时刻。
2、现有技术中,在确定每一相机进行每一次图像采集的触发信号的信号发送时刻的时候,通过外部设备获取相机的进行当前次图像采集的触发信号的信号发送时刻、以及相机对应的出图的时刻,进而确定出相机进行下一次图像采集的触发信号的信号发送时刻。
3、但是上述方式中,需要借助外部设备进行时刻的采集和处理,进而导致信息处理延迟、且过程复杂。
技术实现思路
1、本技术提供一种基于自动驾驶车辆的相机触发方法和设备,用以解决因需要借助借助外部设备进行时刻的采集和处理而导致信息处理延迟、且过程复杂的问题。
2、第一方面,本技术提供一种基于自动驾驶车辆的相机触发方法,包括:
3、所述自动驾驶车辆中设置有现场可编程逻辑门阵列fpga芯片、解串芯片以及n个相机,n为大于等于1的正整数,所述n个相机均与解串芯片连接,所述解串芯片与所述fpga芯片连接;所述方法应用于所述fpga芯片,所述方法包括:
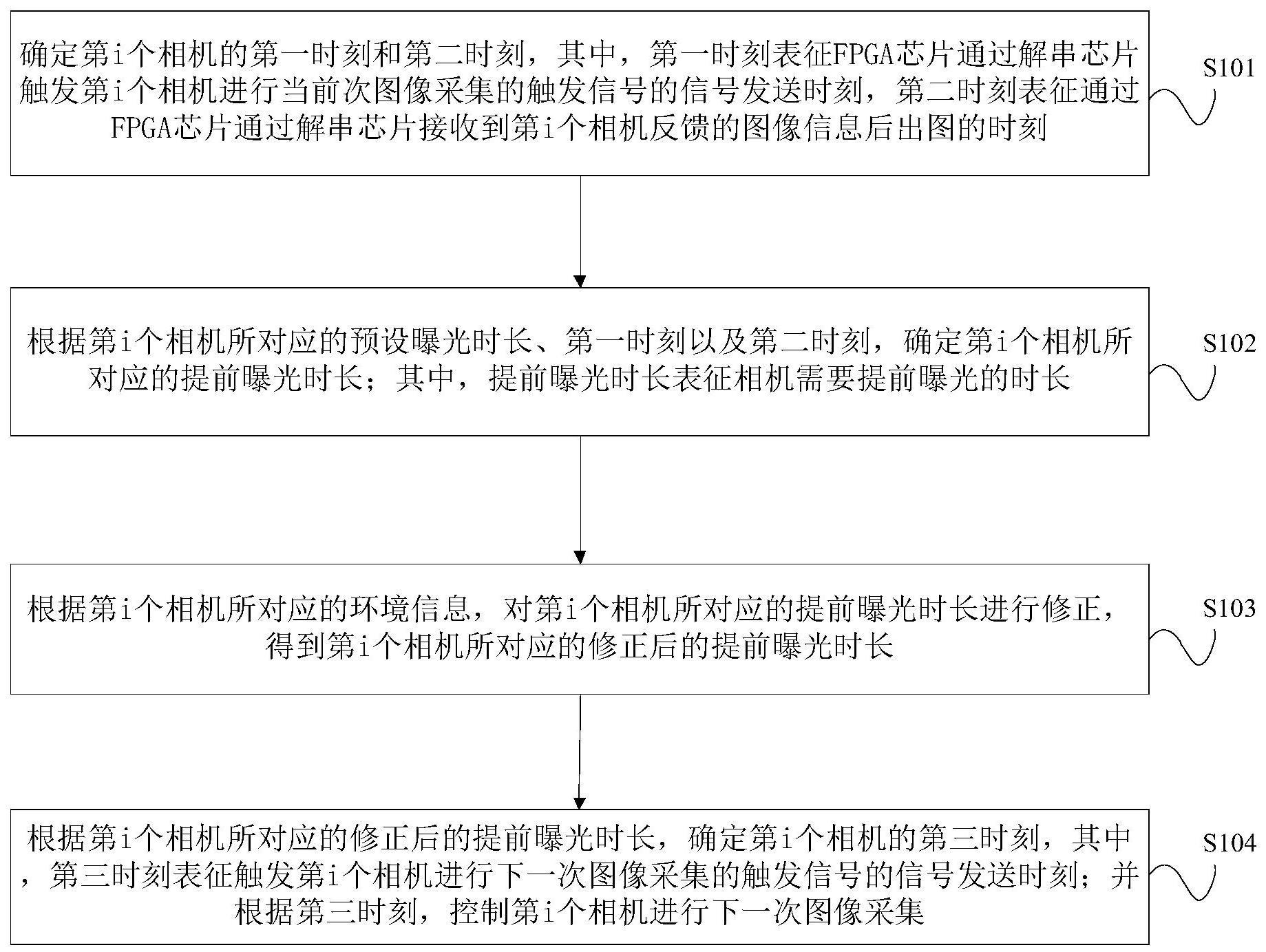
4、确定第i个相机的第一时刻和第二时刻,其中,所述第一时刻表征所述fpga芯片通过所述解串芯片触发第i个相机进行当前次图像采集的触发信号的信号发送时刻,所述第二时刻表征通过所述fpga芯片通过所述解串芯片接收到第i个相机反馈的图像信息后出图的时刻,i为大于等于1、且小于等于n的正整数;
5、根据第i个相机所对应的预设曝光时长、所述第一时刻以及所述第二时刻,确定第i个相机所对应的提前曝光时长;其中,所述提前曝光时长表征相机需要提前曝光的时长;
6、根据第i个相机所对应的环境信息,对第i个相机所对应的提前曝光时长进行修正,得到第i个相机所对应的修正后的提前曝光时长;
7、根据第i个相机所对应的修正后的提前曝光时长,确定第i个相机的第三时刻,其中,所述第三时刻表征触发第i个相机进行下一次图像采集的触发信号的信号发送时刻;并根据所述第三时刻,控制第i个相机进行下一次图像采集。
8、一个示例中,根据第i个相机所对应的预设曝光时长、所述第一时刻以及所述第二时刻,确定第i个相机所对应的提前曝光时长,包括:
9、根据所述第一时刻和所述第二时刻,确定时间差信息;其中,所述时间差信息表征触发第i个相机进行当前次图像采集至出图之间的时间差;
10、根据所述时间差信息和第i个相机所对应的预设曝光时长,确定第i个相机所对应的提前曝光时长。
11、一个示例中,第i个相机所对应的提前曝光时长t=t1-te/2;其中,t1为所述时间差信息,te为第i个相机所对应的预设曝光时长。
12、一个示例中,根据第i个相机所对应的环境信息,对第i个相机所对应的提前曝光时长进行修正,得到第i个相机所对应的修正后的提前曝光时长,包括:
13、获取位于当前时刻之前的多个时刻中每一时刻的曝光时长信息,其中,每一时刻的曝光时长信息表征每一时刻下第i个相机的提前曝光时长;所述多个时刻中包括所述当前时刻;
14、根据所述每一时刻的曝光时长信息、所述第i个相机所对应的环境信息、以及预设的第一对应关系,确定第i个相机所对应的修正后的提前曝光时长;其中,所述预设的第一对应关系表征多个曝光时长信息、环境信息以及修正后的提前曝光时长之间的关系。
15、一个示例中,根据第i个相机所对应的环境信息,对第i个相机所对应的提前曝光时长进行修正,得到第i个相机所对应的修正后的提前曝光时长,包括:
16、获取位于当前时刻之前的多个时刻中每一时刻的曝光时长信息,其中,每一时刻的曝光时长信息表征每一时刻下第i个相机的提前曝光时长;所述多个时刻中包括所述当前时刻;
17、对各所述曝光时长信息进行平均值计算处理,得到曝光时长平均值;
18、根据所述曝光时长平均值、所述第i个相机所对应的环境信息、以及预设的第二对应关系,确定第i个相机所对应的修正后的提前曝光时长;其中,所述预设的第二对应关系表征曝光时长平均值、环境信息以及修正后的提前曝光时长之间的关系。
19、一个示例中,所述环境信息包括以下信息中的一种或多种:温度信息、湿度信息、风的信息。
20、一个示例中,根据第i个相机所对应的修正后的提前曝光时长,确定第i个相机的第三时刻,包括:
21、获取所述自动驾驶车辆中的激光雷达的当前相位信息,并获取第i个相机的相位信息;
22、根据所述激光雷达的当前相位信息、第i个相机的相位信息以及所述激光雷达的预设扫描频率,确定第i个相机所对应的第四时刻;其中,所述第四时刻表征所述激光雷达抵达第i个相机的时刻;
23、根据所述第四时刻和第i个相机所对应的修正后的提前曝光时长,确定第i个相机的第三时刻。
24、一个示例中,根据所述激光雷达的当前相位信息、第i个相机的相位信息以及所述激光雷达的预设扫描频率,确定第i个相机所对应的第四时刻,包括:
25、根据所述激光雷达的当前相位信息和第i个相机的相位信息,确定出所述激光雷达的角度信息,其中,所述角度信息表征所述激光雷达从所述当前相位信息到第i个相机的相位信息的角度;
26、根据所述激光雷达的角度信息和所述激光雷达的预设扫描频率,确定第i个相机所对应的第四时刻。
27、一个示例中,根据所述第四时刻和第i个相机所对应的修正后的提前曝光时长,确定第i个相机的第三时刻,包括:
28、从所述第四时刻开始往前退回第i个相机所对应的修正后的提前曝光时长,得到第i个相机的第三时刻。
29、在可行的一种实施方式中,在自动驾驶车辆中,设置有多个相机、和相机对应的解串芯片以及现场可编程逻辑门阵列fpga芯片,fpga芯片通过解串芯片与每一个相机连接,针对每一个相机,由fpga芯片来触发对应的相机曝光;首先,fpga芯片将触发信号通过解串芯片,发送给相机,fpga芯片通过解串芯片接收到相机反馈的图像信息,同时,fpga芯片会记录发送触发信号的时刻、以及接收相机图像信息的时刻,根据记录的多个时刻,fpga芯片进一步算出从发送触发信号到接收相机出图这一过程的时长,即测量时长;然后,根据相机厂家提供的相机曝光时长、以及计算得出的测量时长,fpga芯片可以直接计算出相机需要提前曝光的时间;获取多次计算的测量时长以及对应的温度、湿度等环境信息之间的关系,对测量时长进行修正,得到修正后的下一次该相机需要提前曝光的时长,减少环境对相机硬件的影响,进而减少相机触发的时间差异,提高硬件同步的精度,获取到更准确的环境信息;再根据计算出来的提前曝光的时间t和当前激光的位置和扫描频率,fpga芯片可以去设置下一次触发信号需要发送的时刻,触发对应的相机进行下一次曝光、以及采集图像,根据确定的从而针对每一个相机,实现自适应的相机提前触发。
30、第二方面,本技术提供一种基于自动驾驶车辆的相机触发装置,所述自动驾驶车辆中设置有现场可编程逻辑门阵列fpga芯片、解串芯片以及n个相机,n为大于等于1的正整数,所述n个相机均与解串芯片连接,所述解串芯片与所述fpga芯片连接;所述装置应用于所述fpga芯片,所述装置包括:
31、第一确定单元,用于确定第i个相机的第一时刻和第二时刻,其中,所述第一时刻表征所述fpga芯片通过所述解串芯片触发第i个相机进行当前次图像采集的触发信号的信号发送时刻,所述第二时刻表征通过所述fpga芯片通过所述解串芯片接收到第i个相机反馈的图像信息后出图的时刻,i为大于等于1、且小于等于n的正整数;
32、第二确定单元,用于根据第i个相机所对应的预设曝光时长、所述第一时刻以及所述第二时刻,确定第i个相机所对应的提前曝光时长;其中,所述提前曝光时长表征相机需要提前曝光的时长;
33、修正单元,用于根据第i个相机所对应的环境信息,对第i个相机所对应的提前曝光时长进行修正,得到第i个相机所对应的修正后的提前曝光时长;
34、第三确定单元,用于根据第i个相机所对应的修正后的提前曝光时长,确定第i个相机的第三时刻,其中,所述第三时刻表征触发第i个相机进行下一次图像采集的触发信号的信号发送时刻;
35、控制单元,用于根据所述第三时刻,控制第i个相机进行下一次图像采集。
36、第三方面,本技术提供一种fpga芯片,所述fpga芯片设置于自动驾驶车辆中,所述自动驾驶车辆中设置有现场可编程逻辑门阵列fpga芯片、解串芯片以及n个相机,n为大于等于1的正整数,所述n个相机均与解串芯片连接,所述解串芯片与所述fpga芯片连接;
37、所述fpga芯片用于执行如权利要求1-9中任一项所述的方法。
38、第四方面,本技术提供一种电子设备,包括:现场可编程逻辑门阵列fpga芯片和解串芯片;
39、所述电子设备设置于自动驾驶车辆中,所述自动驾驶车辆中包括电子设备和n个相机,所述电子设备中的解串芯片与所述电子设备中的fpga芯片连接,所述电子设备中的解串芯片与所述n个相机连接;n为大于等于1的正整数;
40、所述fpga芯片为如上所述的fpga芯片。
41、第五方面,本技术提供一种自动驾驶车辆,所述自动驾驶车辆中设置有n个如上所述的电子设备和n个相机,n为大于等于1的正整数。
42、第六方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现第一方面所述的方法。
43、第七方面,本技术提供一种计算机程序产品,所述计算机程序产品包括:计算机程序,所述计算机程序存储在可读存储介质中,电子设备的至少一个处理器可以从所述可读存储介质读取所述计算机程序,所述至少一个处理器执行所述计算机程序使得电子设备执行第一方面所述的方法。
44、本技术提供的一种基于自动驾驶车辆的相机触发方法和设备,自动驾驶车辆中设置有现场可编程逻辑门阵列fpga芯片、解串芯片以及n个相机,n为大于等于1的正整数,n个相机均与解串芯片连接,解串芯片与fpga芯片连接;方法应用于fpga芯片,方法包括:确定第i个相机的第一时刻和第二时刻;根据第i个相机所对应的预设曝光时长、所述第一时刻以及所述第二时刻,确定第i个相机所对应的提前曝光时长;根据第i个相机所对应的环境信息,对第i个相机所对应的提前曝光时长进行修正,得到第i个相机所对应的修正后的提前曝光时长;根据第i个相机所对应的修正后的提前曝光时长,确定第i个相机的第三时刻;并根据所述第三时刻,控制第i个相机进行下一次图像采集。在自动驾驶车辆中,设置有多个相机、和相机对应的解串芯片以及现场可编程逻辑门阵列fpga芯片,fpga芯片通过解串芯片与每一个相机连接,针对每一个相机,由fpga芯片来触发对应的相机曝光;首先,fpga芯片将触发信号通过解串芯片,发送给相机,fpga芯片通过解串芯片接收到相机反馈的图像信息,同时,fpga芯片会记录发送触发信号的时刻、以及接收相机图像信息的时刻,根据记录的多个时刻,fpga芯片进一步算出从发送触发信号到接收相机出图这一过程的时长,即测量时长;然后,根据相机厂家提供的相机曝光时长、以及计算得出的测量时长,fpga芯片可以直接计算出相机需要提前曝光的时间;获取多次计算的测量时长以及对应的温度、湿度等环境信息之间的关系,对测量时长进行修正,得到修正后的下一次该相机需要提前曝光的时长,减少环境对相机硬件的影响,进而减少相机触发的时间差异,提高硬件同步的精度,获取到更准确的环境信息;再根据计算出来的提前曝光的时间和当前激光的位置和扫描频率,fpga芯片可以去设置下一次触发信号需要发送的时刻,触发对应的相机进行下一次曝光、以及采集图像,根据确定的从而针对每一个相机,实现自适应的相机提前触发。
- 还没有人留言评论。精彩留言会获得点赞!