一种生物组织在线三维成像系统的制作方法
1.本实用新型属于生物组织监测技术领域,具体涉及一种生物组织在线三维成像系统。
背景技术:
2.生物组织包括类器官、细胞团等,其中类器官是由干细胞或者肿瘤细胞在体外三维培养形成的多细胞团。它的生长过程模仿的是人类发育或体外器官再生的过程,因此,跟踪分析类器官的形成过程,可以研究关于人类发育和器官再生的潜在机制,促进对基础生物学的研究。类器官等生物组织拥有较为复杂的三维结构,传统光学显微镜只能进行二维成像,无法满足类器官成像的要求。目前已实现商业化的三维成像工具,诸如共聚焦显微镜和多光子显微镜以及光片显微镜等,都需要对细胞进行荧光标记,这对活细胞的长期培养十分不利。
3.此外,现有技术的三维成像装置主要为激光器、大量精密光学器件和精密机械组件的组合体,这就造成了现有技术还具有以下缺点:成本极高,多数实验室无法配备;光学结构和机械机构极其复杂,装置体积庞大,使用这些设备进行类器官的在线监测时,必须将类器官从培养箱内取出进行成像;假设实验需要每两个小时对类器官进行一次成像,那么就需要研究人员每两个小时操纵一次实验设备,这样就加大了人力消耗,同时频繁的将类器官样品取出培养箱也极易造成类器官样品的污染。
4.由于目前的发光点排布时主要包括正方形网格形和双轴形;三维成像器在进行三维重建成像时,都是将光线沿入射方向进行回传进行重建;由于图像传感器接收的光是经过待监测物承载器、传感器玻璃层和空气层折射后的光,虽然现有的发光点排布方式虽然使得光源照射的光束在待检测物处汇聚到了一点,但是在将全部入射光线进行路线回传,并在光线的聚集处进行重建时,回传路线无法汇聚到一点,会出现偏差,导致重建的精确度较低。
技术实现要素:
5.本实用新型提供了一种生物组织在线三维成像系统,旨在解决现有技术中三维成像装置对生物组织进行三维成像时,成像精度较低的问题。
6.为了解决上述技术问题,本实用新型所采用的技术方案为:一种生物组织在线三维成像系统,包括:
7.支座,设有用于安装图像传感器的安装部;
8.图像传感器,用于在光束照射待监测物时拍照以获取待监测物图像,且所述图像传感器的正上方设有用于放置待监测物的监测位;所述监测位的上方设有呈环形阵列排布的发光点,所述监测位位于环形阵列中心的正下方;
9.光源,用于在环形阵列排布的每个发光点依次照射出覆盖监测位的光束;
10.三维成像器,用于根据图像传感器获取的图像进行三维重建成像。
11.进一步改进的方案:所述光源包括安装架,呈环形阵列排布的所述发光点均位于安装架上,且每个发光点均设有一个led灯。
12.基于上述方案,通过在每一个发光点设置一个led灯,可以通过控制每一个led灯依次发光,从而实现在环形阵列排布的每个发光点依次照射出覆盖监测位的光束。
13.进一步改进的方案:所述安装架包括上部的球面顶和下部的圆筒形外壳,所述led灯设置在球面顶的一个圆周上,所述支座通过连杆设置在圆筒形的中心。
14.进一步改进的方案:所述球面顶上每个led灯处均设有一个遮挡片,每个所述遮挡片上均设有一个轴线穿过监测位的圆孔,所述led灯照射出的光束通过圆孔后照射向监测位的待监测物。
15.基于上述方案:从led发出的光要先透过圆孔才能到达图像传感器,光线通过圆孔后的发散角通常在30
°
以内;由于采用环形阵列,圆孔是斜置的且通过圆孔的光束朝向检测位;相对于现有技术中的平面阵列(发出的光束并非正朝向检测位)光线通过圆孔后的发散角小于30
°
角的照明,本实用新型的照明有效范围更大。
16.进一步改进的方案:所述光源包括驱动组件、旋转支架以及固定在旋转支架上的led灯或激光灯;旋转支架与驱动组件的输出端相连;所述发光点环绕旋转支架设置,所述旋转支架在旋转时,led灯或激光灯依次经过发光点且在发光点处发射出光束。
17.进一步改进的方案:所述光源包括带有显示屏的终端设备,所述发光点设置在显示屏上且所述显示屏通过依次点亮每个发光点来照射出光束,且在每个发光点照射出光束时,显示屏的其余部分调整为暗。
18.进一步改进的方案:所述图像传感器为cmos图像传感器或ccd图像传感器。
19.进一步改进的方案:所述三维成像器通过光学衍射层析算法或滤波反投影算法对图像传感器获取的图像进行三维重建。
20.进一步改进的方案:生物组织在线三维成像系统还包括用于控制光源在环形阵列排布的每个发光点依次发光,且在所述光源向监测位的待监测物照射光束时,控制图像传感器拍摄待监测物图像的控制器。
21.进一步改进的方案:所述控制器为树莓派、单片机、dsp芯片、fpga芯片或计算机;
22.所述三维成像器为dsp芯片、fpga芯片或计算机。
23.本实用新型的有益效果为:
24.本实用新型中的三维成像系统,光源在环形阵列排布的每个发光点照射出的光束均覆盖监测位,光源每在一个发光点照射出光束时,图像传感器拍摄并获取不同角度的待监测物照片,通过然后三维成像器根据图像传感器获取的图像进行三维重建成像;在三维重建过程中无需对对细胞进行荧光标记,便可以实现无标记的三维重建成像。
25.而本实用新型中由于发光点呈环形阵列排布且光束均覆盖位于环形阵列中心正下发的监测位,光线沿入射方向进行回传重建时,回传的光线仍然会汇聚到一点,即恢复样品点,最大程度上减小图像传感器上方的玻璃等因折射对成像效果的影响,重建的三维图像精确度较高。
26.此外,本实用新型由支座、图像传感器、光源和三维成像器,整体的结构较现有的成像装置结构简单且成本低,整个系统可以进行小型化设计,直接放置在培养箱内直接进行成像,无需将将类器官从培养箱内取出进行成像。
27.本实用新型中,环形阵列排布的每个发光点相比于平面形阵列体积更小;由于环形阵列排布的每个发光点到达图像传感器的距离都相等,则所有角度入射光的强度都相等,提高了成像的精确度。由于相同的入射角度,环形阵列排布的每个发光点到达图像传感器的距离都要小于平面阵列,因此光线到达图像传感器上时的光强也要大于平面阵列。
附图说明
28.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简要介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关附图。
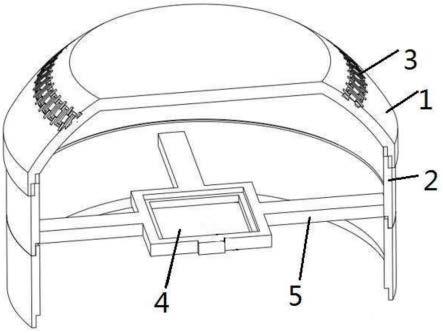
29.图1是本实用新型三维成像系统的结构示意图。
30.图2是本实用新型三维成像系统的内部结构示意图。
31.图3是本实用新型三维成像系统中部分led灯的结构示意图。
32.图4是本实用新型中led灯的电路示意图。
33.图5是本实用新型三维成像系统的原理示意图。
34.图6是本实用新型中,led灯的光线照射路线示意图。
35.图7是现有技术中发光点为轴形的光线沿入射方向的回传线路示意图。
36.图8是本实用新型三维成像系统中led灯的环形阵列排布示意图。
37.图9是本实用新型三维成像系统中环形阵列排布的led灯的光线沿入射方向的回传线路示意图。
38.图10是本实用新型三维成像系统中环形阵列与平面阵列的照射距离对比示意图。
39.图11是本实用新型三维成像系统中环形阵列与平面阵列的照射角度对比示意图。
40.图12是本实用新型三维成像系统中遮挡片的结构示意图。
41.图中标号说明:
42.1-球面顶;2-圆筒形外壳;3-发光点;4-支座;5-连杆;6-遮挡片;7-圆孔;8-导线。
具体实施方式
43.下面将结合本实用新型实施例中附图,对本实用新型实施例中的技术方案进行清楚完整的描述。应当理解,此处所描述的具体实施例仅仅用于解释本实用新型,并不用于限定本实用新型。基于本实用新型的实施例,本领域技术人员在没有创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型的保护范围。
44.如图1和图2所示,本实施例的提供了一种生物组织在线三维成像系统,包括:
45.支座4,设有用于安装图像传感器的安装部;
46.图像传感器,用于在光束照射待监测物时拍照以获取待监测物图像,且所述图像传感器的正上方设有用于放置待监测物的监测位;所述监测位的上方设有呈环形阵列排布的发光点3,所述监测位位于环形阵列中心的正下方;所述待检测物(生物组织)可以直接放置在图像传感器的上表面(图像传感器的玻璃层表面),也可以将带有待检测物的载玻片或者细胞培养皿等放置在图像传感器的上表面,此时待检测物位于监测位处。
47.光源,用于在环形阵列排布的每个发光点3依次照射出覆盖监测位的光束,即光束
在监测位处均通过一点;如图5所示。
48.三维成像器,用于根据图像传感器获取的图像进行三维重建成像。
49.为了在环形阵列排布的每个发光点3照射出覆盖监测位的光束,在上述方案的基础上杭,光源可以采用如下方案中的具体结构:
50.方案一:如图1和图2,所述光源包括安装架,呈环形阵列排布的所述发光点3均位于安装架上,且每个发光点3均设有一个led灯。
51.所述安装架包括上部的球面顶1和下部的圆筒形外壳2,所述led灯设置在球面顶1的一个圆周上,所述支座4通过连杆5设置在圆筒形的中心。所述支座4可以为一个方形框架。球面顶1和下部的圆筒形外壳2通过可拆的方式固定在一起或一体设置。
52.参阅图3和图12,所述球面顶1上每个led灯处均设有一个遮挡片6,led灯位于遮挡片6的背侧,所述遮挡片6为方形,每个所述遮挡片6上均设有一个轴线穿过监测位的圆孔7,所述led灯照射出的光束通过圆孔7后照射向监测位的待监测物;led发出的光在透过圆孔后变成相干性较好的点光源,然后光线传播一段距离后透过样品,再传播一段距离后由cmos图像传感器接收;圆孔的直径一般100μm左右。
53.led灯的数量可以根据实际需求设置,一般超过20个,作为优选的一种方案,如图4所示,led灯有64个且依次相连,每个led灯均连接有din、vcc、gnd和dout四个管脚(din表示数据输入,dout表示数据输出,gnd表示接地端,vcc表示电源端);下一个led灯的输入din接口与上一个led灯的输出dout通过导线相连;控制器发出的控制信号从input端口输入,即第一个led灯l1的输入din接口与控制器的input端口相连;控制器包括树莓派、单片机、dsp芯片、fpga芯片或计算机;发出控制信号,信号依次经过每个led灯,当信号经过led灯时,则led灯发出光束。
54.如图5所示,为了保证检测的精确度,所述led灯距离样品(待检测物)的距离要远大于样品距离cmos图像传感器的距离,此外,由于样品及cmos图像传感器的体积较小,因此可以使得样品接收到的光束是细小的平行光束;一种可行的方案:led灯距离样品的距离z1约6cm;样品距离cmos图像传感器的距离z2要小于3mm(一般1mm左右)。图5中仅仅是为了表示系统原理的示意图,实际上样品及cmos图像传感器的体积远小于图5中所示的体积,且led灯照射出的光束也接近于一束平行光,并非图中所示的角度。
55.方案二:所述光源包括驱动组件、旋转支架以及固定在旋转支架上的led灯或激光灯;旋转支架与驱动组件的输出端相连;所述发光点环绕旋转支架设置,所述旋转支架在旋转时,led灯或激光灯依次经过发光点且在发光点处发射出光束。驱动组件包括旋转电机和设置在旋转电机与旋转支架之间的减速器。
56.旋转支架由驱动电机带动旋转,led灯或激光灯由控制器(树莓派、单片机、dsp芯片、fpga芯片或计算机)控制led灯或激光灯的开关,并在每个发光点发出光束。
57.方案三:所述光源包括带有显示屏的终端设备,所述发光点设置在显示屏上且所述显示屏通过依次点亮每个发光点来照射出光束,且在每个发光点照射出光束时,显示屏的其余部分调整为暗。所述终端设备可以为平板电脑、手机等带有显示屏的终端设备。
58.在上述任一方案的基础上,所述图像传感器为cmos图像传感器或ccd图像传感器。
59.在上述任一方案的基础上,所述三维成像器通过光学衍射层析算法、滤波反投影算法或强度衍射层析类算法对图像传感器获取的图像进行三维重建;其中,光学衍射层析
算法、滤波反投影算法或强度衍射层析类算法属于现有的算法,这里不再赘述。
60.参阅图4,在上述任一方案的基础上,生物组织在线三维成像系统还包括用于控制光源在环形阵列排布的每个发光点依次发光,且在所述光源向监测位的待监测物照射光束时,控制图像传感器拍摄待监测物图像的控制器。
61.所述控制器可以为树莓派(一种用于控制的微型计算机,体积<5cm
×
7cm
×
2cm。)、单片机、dsp芯片、fpga芯片或计算机等。
62.所述三维成像器为dsp芯片、fpga芯片或计算机。
63.如图5和6,当光线经过样品(待检测物)后,仍需要穿过三层不同折射率的介质才能到达cmos图像传感器的接受区,第一层是用于盛放待检测物的器具,如玻片、样品槽或者细胞培养皿等,第二层是cmos图像传感器表层的玻璃,用于保护cmos图像传感器,第三层是空气层;光线经过这三层介质时会发生折射。
64.如图7,现有的发光点以双轴形装置为例,取一根轴上的任意三个led灯a、b、c;从a、b、c发出的光经过样品点,最终到达cmos图像传感器的cmos图像接收面的a、b、c处。三维重建算法的重建过程本身可以理解为光线沿入射方向的回传过程,回传方向指光线经过样品时的入射方向,即虚线所指方向。从图7可以看出光沿三条虚线回传后并未相交于一点,这也就是说重建过程并不能恢复样品点;导致重建后的精确度较低;正方形网格阵列的排布方式存在同样的问题。
65.如图8和图9所示,本实用新型中,将环上的led分成若干对称组,如图中a1-b1,a2-b2,a3-b3;取a1-b1组进行分析,由于a1和b1对称,所以其入射角度都相同,根据几何原理,可以发现两条回传虚线的交点正好位于原样品点正下方;同理,其他对称组也有这个特点,且交点离样品点的距离都相同,因此所有回传虚线都会相交于一点,因此能恢复样品点;虽然位置与原样品点有高度上的偏离,但这并不影响重建效果。
66.如图10所示,本实用新型中,环形阵列排布的每个发光点相比于平面形阵列体积更小。由于环形阵列排布的每个发光点到达图像传感器的距离都相等,则所有角度入射光的强度都相等,提高了成像的精确度。由于相同的入射角度,环形阵列排布的每个发光点到达图像传感器的距离都要小于平面阵列,因此光线到达图像传感器上时的光强也要大于平面阵列。
67.如图11所示,从led发出的光要先透过圆孔才能到达cmos图像传感器,光线通过小孔后的发散角通常在30
°
以内,这就意味着平面阵列只能实现小于30
°
角的照明,而弧形阵列中圆孔是斜置的,因此能解决这个问题,实现大角度照明。
68.下面结合工作原理对本实用新型做进一步说明:
69.树莓派控制每个led灯依次发出光束,在每个led灯发出光束后,光束穿过圆孔后,然后依次穿过样品、穿过样品槽、cmos图像传感器表层的玻璃和空气层到达cmos图像传感器图像接收区,树莓派控制cmos图像传感器接收光束;基于每个led灯依次发出光束,cmos图像传感器依次获取不同角度的待检测物图像;cmos图像传感器将获取的图像传输到计算机,计算机采用通过光学衍射层析算法、滤波反投影算法或强度衍射层析类算法对图像传感器获取的图像进行三维重建,获得重建后的待检测物三维图像。
70.本实用新型不局限于上述可选实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是落入本实用新型权利要
求界定范围内的技术方案,均落在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1