摄像头模组及电子设备的制作方法
本技术涉及电子设备,尤其涉及一种摄像头模组及电子设备。
背景技术:
1、随着电子设备的不断普及,电子设备已经成为人们日常生活中不可或缺的社交、娱乐工具,人们对于电子设备的要求也越来越高。为了满足人们的拍照或摄像需求,摄像头模组已结合到各种电子设备上,例如,手机、平板电脑、笔记本电脑等。
2、为提升拍照效果,摄像头模组通常通过闭环式马达(close loop motor)带动镜头组件实现自动对焦。闭环式马达为了获取镜头组件的位置信息,通常需要内置一个霍尔器件与磁石。霍尔器件用于感应磁石磁通量变化,从而得到磁石的位置信息,即相当于镜头组件的位置信息,实现马达运动的闭环控制。
3、现有的霍尔器件一般贴附在一个单独的柔性电路板(flexible printedcircuit,fpc)上,然后将该fpc与摄像头模组的fpc(与电子设备内的主板电连接的fpc)焊接,进而实现电连接,这将导致马达组装工艺复杂,且成本高。
技术实现思路
1、为了解决上述技术问题,本技术提供一种摄像头模组及电子设备。可以降低摄像头模组内的摄像头马达的组装难度,以及降低物料成本。
2、第一方面,本技术实施例提供一种摄像头模组,该摄像头模组包括:镜头组件、摄像头马达和电路板组件;摄像头马达包括驱动装置、承载结构、马达外壳、霍尔器件和霍尔磁石;马达外壳包括顶面和环形侧面,环形侧面围设在顶面的周缘;顶面开设有一镂空结构;顶面和环形侧面围成收容腔体,收容腔体用于收容驱动装置和承载结构;镜头组件穿过镂空结构设置于承载结构上;驱动装置用于带动承载结构和位于承载结构上的镜头组件沿镜头组件的光轴方向移动,以实现对焦;承载结构上设置有容置凹部,霍尔磁石嵌于容置凹部内,以使霍尔磁石跟随承载结构的移动而移动;马达外壳的环形侧面上开设有一开口部;电路板组件包括连续的第一分部、第二分部和第三分部,第一分部和第三分部为柔性电路板,第二分部为硬质电路板,第三分部上设置有霍尔器件,通过弯折第三分部,使得第三分部上的霍尔器件嵌于开口部内。
3、本技术实施例中,将电路板组件延伸一段柔性电路板(即第三分部),霍尔器件通过表面组装技术设置于该柔性电路板上,同时马达外壳对应霍尔磁石的位置开孔(即开口部),柔性电路板弯折后贴到马达外壳上,且霍尔器件嵌于开孔内,这样使得霍尔器件与霍尔磁石相对应,这样设置,可以降低了马达组装的难度,同时降低了物料成本,使得马达能够像开环马达一样进行组装。此外,由于马达内部减少了霍尔器件、柔性电路板等器件,相同推力和行程的情况下,马达尺寸也可以减小。
4、示例性的,第二分部上设置有传感器、数字信号处理芯片等。第一分部用于将数字信号处理芯片对传感器输入的电流信号进行处理后的信号传输至电子设备主板上的处理器(图中未示出)中进行处理。
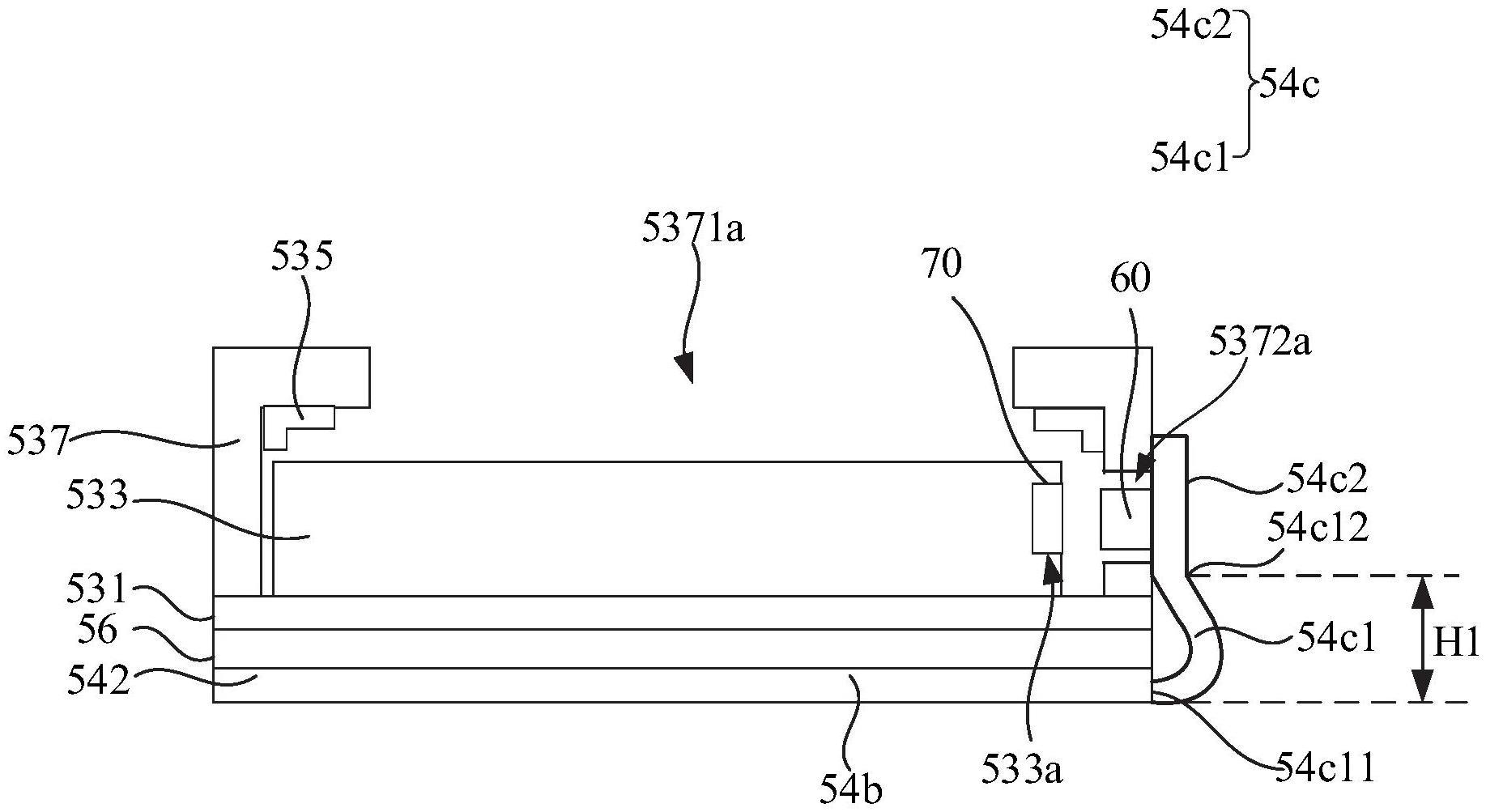
5、在一些可能实现的方式中,第三分部包括连续的弯折子部和固定子部,弯折子部位于固定子部和第二分部之间,固定子部上设置有霍尔器件;通过弯折弯折子部,以使固定子部上的霍尔器件嵌于开口部内,即将第三分部设置成两部分,一部分用于设置霍尔器件,一部分用于弯折,这样设置,可以便于霍尔器件的设置,以及便于摄像头模组的组装。
6、在一些可能实现的方式中,在上述第三分部包括连续的弯折子部和固定子部的基础上,弯折子部包括第一边缘和第二边缘,第二边缘为与固定子部接触的边缘,第一边缘为与第二分部接触的边缘;其中,弯折子部的长度大于第二边缘到第二分部所在平面的距离。
7、这样设置,可以保护弯折子部内的线路,避免弯折子部内的线路有断裂的风险。
8、在一些可能实现的方式中,在上述弯折子部的长度大于第二边缘到第二分部所在平面的距离的基础上,弯折子部的长度与第二边缘到第二分部所在平面的距离的差值大于或等于0.2mm,且小于或等于5.0mm。
9、这样设置,既不会因为弯折子部的长度过长,使得整个模组的尺寸较大,又不会因为弯折子部的长度过短,不利于组装,以及,保护弯折子部内的线路,避免弯折子部内的线路有断裂的风险。
10、示例性的,弯折子部的长度与第二边缘到第二分部所在平面的距离的差值例如为0.2mm、1mm、1.5mm、2mm、2.5mm、3mm、3.5mm、4mm、4.5mm或5mm等。
11、在一些可能实现的方式中,在上述弯折子部的长度与第二边缘到第二分部所在平面的距离的差值大于或等于0.2mm,且小于或等于5.0mm的基础上,弯折子部的弯折半径大于或等于0.6mm,进一步保护弯折子部内的线路,避免弯折子部内的线路有断裂的风险。
12、示例性的,弯折子部的弯折半径例如为0.6mm、0.65mm、0.7mm、0.75mm等。
13、在一些可能实现的方式中,摄像头马达还包括定位结构;在组装霍尔器件,定位结构用于对霍尔器件进行定位,以使霍尔器件设置于预设位置。
14、定位结构的位置可以提高对位的效率以及准确性。
15、示例性的,预设位置为与定位结构接触的位置,还可以为与霍尔磁石相对的位置。
16、在一些可能实现的方式中,在上述摄像头马达还包括定位结构的基础上,驱动装置包括弹片和支架,支架包括环形支撑部和设置于环形支撑部朝向承载结构一侧的凸起部,环形支撑部用于对弹片进行支撑,凸起部复用为定位结构,这样一来无需单独设置定位结构,实现定位的同时,还可以简化摄像头马达的结构。
17、在一些可能实现的方式中,摄像头模组还包括固定结构,固定结构用于将第三分部固定于环形侧面的外表面上,以使霍尔器件固定于开口部,使得霍尔器件在开口部内的位置不变,进而提高霍尔器件的稳定性。
18、在一些可能实现的方式中,在上述摄像头模组还包括固定结构的基础上,固定结构包括粘合层;粘合层包括双面胶层或背胶层等可以实现粘合作用的胶层,当固定结构包括粘合层时,固定结构的成本低,且设置方便。
19、在一些可能实现的方式中,沿光轴方向,环形侧面包括第三边缘和第四边缘,开口部包括第五边缘和第六边缘,第五边缘到第三边缘的距离与第六边缘到第四边缘的距离的差值在预设范围内。
20、这样设置,有利于马达外壳的成型。
21、示例性的,第五边缘到第三边缘的距离等于第六边缘到第四边缘的距离。
22、在一些可能实现的方式中,当承载结构处于设定位置时,霍尔磁石与霍尔器件相对;当承载结构移动时,霍尔磁石与霍尔器件错开设置。也就是说,当承载结构处于设定位置(初始位置)时,霍尔磁石与霍尔器件相对,霍尔器件采集到的磁场强度较大;当承载结构移动至需要的位置时,霍尔磁石与霍尔器件错开,霍尔器件采集到的磁场强度变小,基于霍尔器件采集到的磁场强度可以获取到承载结构的位置,进而确定设置于承载结构上的镜头组件的位置,以形成具有对焦位置反馈功能的闭环系统,提升了对焦时速和对焦的精确度。当然,当承载结构处于设定位置时,霍尔磁石与霍尔器件并不一定相对,本领域技术人员可以根据实际情况设置。霍尔磁石与霍尔器件相对时,霍尔器件采集到的磁场强度较大,有利于后续的运算。
23、在一些可能实现的方式中,驱动装置包括驱动磁石和驱动线圈,驱动线圈处于驱动磁石的磁场中,驱动线圈通电时将受到沿光轴方向的安培力;驱动线圈缠绕在承载结构的外周,在安培力的作用下,驱动线圈带动承载结构和位于承载结构上的镜头组件沿光轴方向移动,以实现对焦。当然,驱动装置并不限于,只要可以带动承载结构移动的装置均在本技术的保护范围内。
24、第二方面,本技术实施例提供一种电子设备,包括第一方面的摄像头模组,可以实现第一方面所有的有益效果。
- 还没有人留言评论。精彩留言会获得点赞!