装置以及方法与流程
本公开涉及装置以及方法。
背景技术:
1、在3gpp(3rd generation partnership project:第三代合作伙伴项目)的版本15(release 15)中,作为lte(long term evolution:长期演进)的工作项,讨论面向作为用户设备(user equipment:ue)的uav(unmanned aerial vehicle:无人飞行器)的若干功能(非专利文献1)并制订了标准。
2、flight path(飞行路径)功能是被制订了标准的功能之一。在flight path功能中,根据来自网络的请求,从uav向网络报告uav的飞行路径(flight path)。由此,设想有助于网络侧的基于uav移动计划的切换或波束成形等控制(非专利文献2)。
3、虽然在nr(new radio:新无线电)中尚未规定flight path功能,但在版本18(release 18)的工作项提案中提及了flight path功能的应用(非专利文献3至5)。
4、现有技术文献
5、非专利文献
6、非专利文献1:3gpp ts 36.331v15.14.0(2021-06),“3rd generationpartnership project;technical specification group radio access network;evolved universal terrestrial radio access(e-utra);radio resource control(rrc);protocol specification(release 15)”
7、非专利文献2:3gpp tsg-ran wg2 meeting#101bis sanya,china,16-20apr2018,r2-1805125,huawei,hisilicon,cmcc,fraunhofer,nokia,nokia shanghai bell,lenovo,motorola mobility,interdigital,kddi,"discussion on flight pathinformation"(关于飞行路径信息的讨论)
8、非专利文献3:3gpp tsg ran-ran-rel-18workshop,online,2021-06-28-2021-07-02,rws-210190,ericsson,"motivation for rel-18 uav"(开发rel-18 uav的动机)
9、非专利文献4:3gpp tsg ran rel-18workshop,electronic meeting,june 28-july 2,2021,rws-210254,lenovo,motorola mobility,"discussion on uav swarmsupport in nr ran for rel-18"(讨论rel-18 nr ran中对uav群的支持)
10、非专利文献5:3gpp tsg ran rel-18workshop,electronic meeting,june 28-july 2,2021,rws-210474,zte,sanechips,"support of uav for 5g advanced"(5gadvanced对uav的支持)
技术实现思路
1、发明人经过详细探讨,发现了以下课题。即,在非专利文献1、2中记载的版本15(release 15)的机制中,没有考虑路径信息的粒度,从ue报告的路径信息的粒度依赖于该ue的实现。因此,ue所报告的路径信息的粒度有可能不适于网络(即,基站)侧的基于路径信息的通信控制。
2、本公开的目的在于提供一种能够提供适于基站中基于路径信息的通信控制的路径信息的装置以及方法。
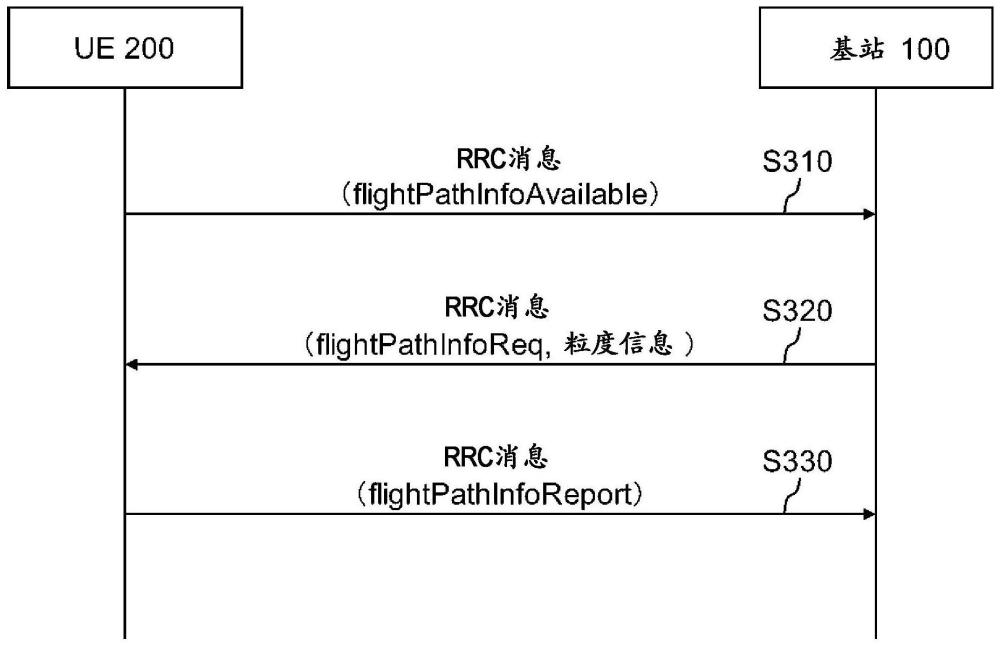
3、本公开的一个方式所涉及的装置(200)包括:通信处理部(235),从基站(100)接收包括与路径信息有关的粒度信息的rrc(radio resource control:无线电资源控制)消息,该路径信息至少指示上述装置的移动路径;以及信息获取部(231),获取上述rrc消息中包括的上述粒度信息,上述粒度信息指示上述移动路径上的地点之间的间隔。
4、本公开的一个方式所涉及的装置(100)包括:信息获取部(141),获取与至少指示用户设备(200)的移动路径的路径信息有关的粒度信息;以及通信处理部(145),向上述用户设备发送包括上述粒度信息的rrc(radio resource control:无线电资源控制)消息,上述粒度信息指示上述移动路径上的地点之间的间隔。
5、本公开的一个方式所涉及的由装置(200)执行的方法包括:从基站(100)接收包括与路径信息有关的粒度信息的rrc(radio resource control:无线电资源控制)消息,该路径信息至少指示上述装置的移动路径;以及获取上述rrc消息中包括的上述粒度信息,上述粒度信息指示上述移动路径上的地点之间的间隔。
6、本公开的一个方式所涉及的由装置(100)执行的方法包括:获取与至少指示用户设备(200)的移动路径的路径信息有关的粒度信息;以及向上述用户设备发送包括上述粒度信息的rrc(radio resource control:无线电资源控制)消息,上述粒度信息指示上述移动路径上的地点之间的间隔。
7、根据本公开,能够提供适于基站中基于路径信息的通信控制的路径信息。此外,根据本公开,可以作为该效果的代替,或是与该效果一起,发挥其他效果。
技术特征:
1.一种装置(200),包括:
2.根据权利要求1所述的装置,
3.根据权利要求1所述的装置,
4.根据权利要求1至3中任一项所述的装置,
5.根据权利要求1至4中任一项所述的装置,
6.根据权利要求1至5中任一项所述的装置,
7.根据权利要求1至6中任一项所述的装置,
8.根据权利要求7所述的装置,
9.根据权利要求7或8所述的装置,
10.根据权利要求7所述的装置,
11.一种装置(100),包括:
12.根据权利要求11所述的装置,
13.一种由装置(200)执行的方法,包括:
14.一种由装置(100)执行的方法,包括:
技术总结
本公开的一个方式所涉及的装置(200)包括:通信处理部(235),从基站(100)接收包括与路径信息有关的粒度信息的无线电资源控制RRC(Radio Resource Control)消息,该路径信息至少指示上述装置的移动路径;以及信息获取部(231),获取上述RRC消息中包括的上述粒度信息,上述粒度信息指示上述移动路径上的地点之间的间隔。
技术研发人员:山本智之,高桥秀明
受保护的技术使用者:株式会社电装
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!