高动态场景下的无线信道建模方法
本发明属于通信,更一步涉及一种无线信道建模方法,可应用于无人机对地通信。
背景技术:
1、近年来,空对地a2g通信技术由于其在高空平台和无人驾驶飞行器应用中的潜力而受到广泛关注。这是因为a2g网络可以作为传感器平台在网络受损等紧急情况下实现远程位置覆盖,或者作为低成本基础设施在拥挤区域提供流量卸载。在a2g网络中,空对地无线信道起着至关重要的作用,如何准确地描述空对地无线信道变得尤为重要。在低仰角区域空地信道建模方法已经逐渐完备,但是在中高仰角区域,无人机处于高速移动状态下,目前还没有完备的无线信道建模方法。随着无人机和空中基站的高速发展,如何在高动态场景下,建立中高仰角区域空地信道模型亟待进一步研究。
2、南京航空航天大学在其申请号:2022105273550的专利申请文献中公开了“一种考虑高平台物理结构的空地信道建模方法”。该方法针对高空平台的对地通信场景,实时计算视距路径和非视距路径,实时计算时延、发射平台离开角的俯仰角和方位角,及地面接收端的到达角的俯仰角和方位角。但是该方法的实施需要空地通信场景中的实时三维数据,而实际通信中由于无人机的高速移动难以获得,影响模型的准确性。
3、北京润科通用技术有限公司在其申请号:201710210448.x的专利申请文献中公开了“一种空地信道建模方法及装置”。该方法的主要步骤是:(1)确定当前无人机通信场景中影响空地信道传输的地表地形特征信息;(2)获取发射端和接收端的已知信息、当前环境的气候信息和信道模拟场景的置信度信息;(3)根据所述地表地形特征信息、发射端与接收端的已知信息、当前环境的气候信息和信道模拟场景的置信度信息,提取影响空地建模的影响参数;(4)基于所述影响参数,构建空地信道模型。但是该方案在当无人机基站处于中高仰角区域时,由于建模没有优先考虑无线电波的传播方式,因而会造成建模的信道参数有较大的误差,影响模型的准确性。
4、北京航空航天大学在其发表的论文“a statistical model for the uavcommunication channel”中公开了一种基于无人机实测飞行数据的统计模型,其将飞行分为途中、盘旋、起飞和着陆,四种情况进行信道模型建立。虽然该模型对于无人机在测量数据时的信道性能仿真具有重要意义,但是该模型由于没有考虑到雨衰因素以及通信场景对于小尺度衰落的影响,模型的准确性低。
5、北京邮电大学在其发表的论文“高速移动飞行器的信道建模与仿真”中,针对空对地通信场景,公开了一种复合的三维信道模型。其将服从高斯-马尔可夫过程的移动性模型引入空对地场景中,描述飞行器和地面站的移动和位置变化,并将散射变量分为两类,改进数种适用于空地场景的几何结构,最后分析信道特性。但是该模型并没有考虑到空地通信场景中三维变量仰角对于信道模型的影响,无法适用于高仰角空对地通信区域。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提出一种高动态场景下的无线信道建模方法,以通过考虑雨水衰减因素和通信场景对小尺度衰落的影响,提高信道模型在高动态场景下的准确性。
2、为实现上述目的,本发明的技术方案包括如下步骤:
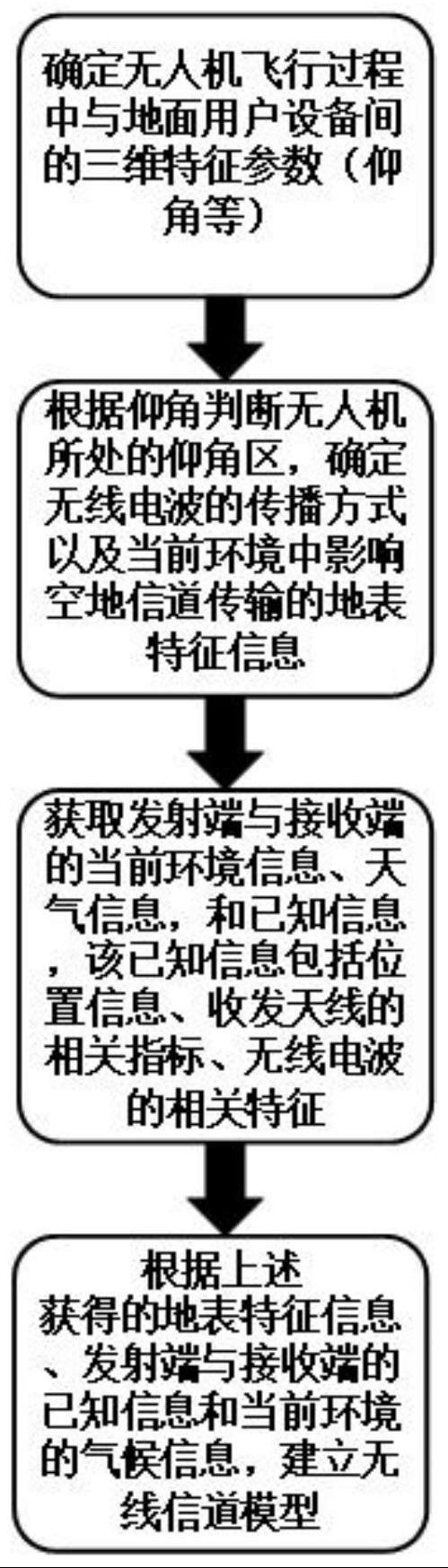
3、(1)在通信场景中,确定无人机飞行过程中与地面用户设备间的三维特征参数;
4、设场景中预定的无人机飞行高度为h,无人机和地面设备用户的水平距离为d2d,无人机与用户设备间的三维距离为d3d,无人机与地面设备间仰角为θ=arctan(h/d2d);
5、(2)根据仰角θ判断无人机所处的仰角区,确定无线电波的传播方式以及当前环境中影响空地信道传输的地表特征信息:
6、若θ≥40°,则认为无人机所处高仰角区,电磁波传播特性为自由空间传播特性,且受天气、大气环境影响,同时具有明显的双射线传播效应;
7、若2.5°<θ≤40°,则认为无人机所处中仰角区,电磁波传播特性介于自由空间和地面链路之间,且会受到地形地物的部分遮挡,具有部分杂散损耗和阴影效应,具有双射线传播效应;
8、若2.5°≤θ,则认为无人机所处低仰角区,电磁波传播特性接近地面链路传播特性,且会受到较为严重的地形地物遮挡,具有明显的杂射损耗和阴影衰落及多径效应;
9、(3)获取发射端与接收端的当前环境信息、天气信息,和已知信息,该已知信息包括位置信息、收发天线的相关指标、无线电波的相关特征;
10、(4)根据(3)获得的地表特征信息、发射端与接收端的已知信息和当前环境的气候信息,建立无线信道模型:
11、4a)从所述地表的特征信息、发射端与接收端的已知信息和当前环境的气候信息,提取影响空地信道建模的影响参数,建立路径损耗pl、雨水衰减损耗pl-及传播总损耗pl*:
12、pl=10αlog(d3d)+epa
13、
14、pl*=pl+epb(θ-epc)+pl-
15、其中,α是路径损耗因子,是无人机到地面用户设备的三维距离,epa是一个载频与无人机飞行高度和空对地a2g信道环境及传播地形有关的经验参数,epb是一个反应仰角和路径损耗关系的标度参数,epc是调节仰角对路径损耗的影响的仰角相关参数,单位为弧度;c是雨衰因子,γ是降雨量,γr是雨衰减的衰减率;
16、4b)根据(3)获得的a2g传播环境信息,给出不同的ms衰落分布:
17、对于接收端在没有任何遮挡的空旷的场地,使用对数正态分布描述ms衰落,其概率密度分布函数为:其中,x是ms衰落值,μ是ms衰落均值,σ是ms衰落方差;
18、对于接收端位于有树木等遮挡的场景,使用正态分布描述ms衰落,其概率密度分布函数为:
19、
20、对于接收端位于附近有房屋等建筑物郊区环境,使用伽马分布描述ms衰落,其概率密度分布函数为:其中β是形状参数,γ是尺度参数。
21、本发明与现有技术相比有如下优点:
22、第一,本发明由于考虑了雨水和大气造成的传输衰减,即基于测试时的天气和气候状况,通过查阅文献得到干燥空气条件下的特征衰减、不同水汽密度条件下的特征衰减及降雨量,分别计算特征衰减率和雨衰减的衰减率,根据特征衰减率和雨衰减的衰减率计算雨水和大气造成的传输衰减,因而相比于现有技术,提高了模型的准确性;
23、第二,本发明由于考虑了不同的a2g环境对多径和阴影衰落的影响,即在不同的传播场景,用手机终端和路测终端测量不同的接收功率和传播损耗,分别将不同场景处的接收功率和传播总衰减和传播损耗的差值代入k方检验,分别检验不同的概率分布函数,当检验到任一分布函数k值为1,且检验其余分布函数k值为0时,认为该场景处的多径和阴影衰落符合该分布,因而相比于现有技术,提高了模型的准确性;
24、第三,本发明由于考虑了无人机对地面用户大仰角的特点,即在计算传输总损耗时,利用仰角、仰角修正参数,加入a2g场景中仰角等三维参数对传播损耗的影响,进一步提高了模型的准确性。
- 还没有人留言评论。精彩留言会获得点赞!