一种基于粒子滤波算法的无人机攻击检测模型的建立方法
本发明涉及无人机安全,具体涉及一种基于粒子滤波算法的无人机攻击检测模型的建立方法。
背景技术:
1、无人机(unmanned aerial vehicles,uavs)是一种以无线电遥控或由自身程序控制为主的无人驾驶飞行器;自从在军事和民用领域投入使用以来,已经在多个方面展示了其独特的性能和优势;与此同时,影响无人机安全的威胁亦随之增多,严重影响其任务执行和效能发挥;其中,网络安全威胁是需要重点关注的问题之一;与传统有线网络相比,无人机通信环境更加开放,因此更容易遭受来自地面和空中的干扰、截获及伪造等恶意攻击;因此,从网络安全的角度分析无人机面临的各种安全威胁及可能造成的影响,对于了解其在网络安全方面的薄弱环节并进行主动防御进而提高安全防护能力具有重要意义;
2、无人机是一种高度集成了计算单元、通信单元以及控制单元的智能系统,具备典型信息物理系统(cyber physical system,cps)的全部特征,由于信息系统和物理系统发生深度耦合,无人机系统运行也面临较为严重的安全问题,即针对信息系统的网络攻击会通过跨空间的风险传播影响到物理系统的安全运行,甚至引发灾难性事故;而目前大量研究主要集中在对无人机的网络安全威胁分析方面,对于网络安全威胁从信息域到物理域的跨空间传播机制鲜有提及;同时现有的无人机攻击检测多是从网络信息流的角度入手,关于信息-物理的交互考虑很少,事实上cps系统遭受网络攻击后最终的效果会体现在物理层上,因此,针对物理层的性能变化进行相应的攻击检测对于提升无人机整体安全具有更加重要的意义。
3、基于此,亟需设计一种基于粒子滤波算法的无人机攻击检测模型的建立方法,以解决上述现有技术存在的问题。
技术实现思路
1、针对上述存在的问题,本发明旨在提供一种基于粒子滤波算法的无人机攻击检测模型的建立方法,本方法通过将粒子滤波算法引入无人机cps网络安全威胁模型中,建立了一种基于粒子滤波算法的无人机攻击检测模型,本模型能够有效检测无人机因遭受网络攻击产生的运行状态变化,具有检测精度高和鲁棒性好的特点。
2、为了实现上述目的,本发明所采用的技术方案如下:
3、一种基于粒子滤波算法的无人机攻击检测模型的建立方法,包括
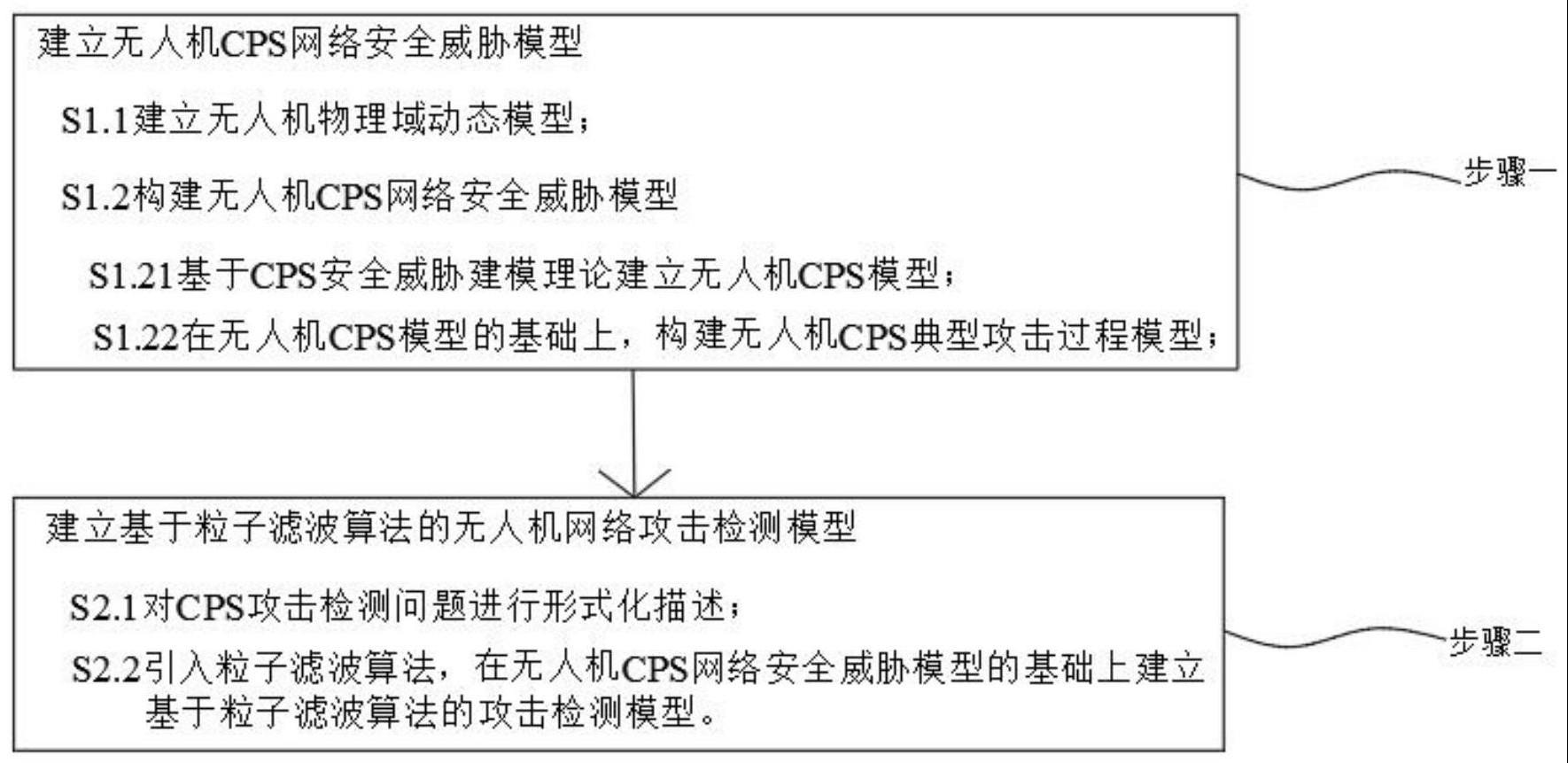
4、步骤一:建立无人机cps网络安全威胁模型
5、s1.1建立无人机物理域动态模型;
6、s1.2构建无人机cps网络安全威胁模型
7、s1.21基于cps安全威胁建模理论建立无人机cps模型;
8、s1.22在无人机cps模型的基础上,构建无人机cps典型攻击过程模型;
9、步骤二:建立基于粒子滤波算法的无人机网络攻击检测模型
10、s2.1对cps攻击检测问题进行形式化描述;
11、s2.2引入粒子滤波算法,在无人机cps网络安全威胁模型的基础上建立基于粒子滤波算法的攻击检测模型。
12、优选的,步骤s1.1所述的无人机物理域动态模型包括
13、
14、
15、其中,α为无人机俯仰角,vα为俯仰角α方向上的扭矩,jxy为沿x轴、v轴旋转的转动惯量,为无人机与y轴夹角的二阶导数,β为无人机与y轴之间的夹角,vβ为无人机翻滚角β方向上的扭矩,为翻滚角的角加速度,γ为无人机绕z轴旋转角度,vγ为无人机螺旋桨产生的总扭矩,为无人机螺旋桨的二阶导数,vz为各螺旋桨产生的沿z轴向上的总推力,m为质量,g为重力加速度。
16、优选的,步骤s1.21所述的无人机cps模型为
17、
18、y(t)=h(x,u,w,t) (14)
19、其中,x(t)∈rn为系统状态变量,u(t)∈rm为是系统受控输入,v(t)表示过程噪声,f(x,u,t)∈rn是描述系统动态的非线性函数,y(t)∈rp是来自于传感器的量测变量,w(t)表示量测噪声,h(x,u,t)∈rp是描述系统实际测量过程的非线性函数,t为系统时间,rn、rm、rp分别代表n维、m维、p维实向量集。
20、优选的,步骤s1.22所述的无人机cps典型攻击过程模型的建立过程包括
21、(1)建立欺骗类攻击模型;
22、(2)建立拒绝服务类攻击模型。
23、优选的,所述的欺骗类攻击模型包括浪涌攻击模型、偏差攻击模型和几何攻击模型,其中
24、所述浪涌攻击模型的攻击模型为
25、
26、其中,ts表示攻击开始的时刻,yi(t)表示t时刻系统状态变量正常值,cmax表示ts时刻由于攻击产生的偏差值;
27、所述偏差攻击模型的攻击模型为
28、
29、其中,ci为一个非零常数;
30、所述几何攻击模型的攻击模型为
31、
32、其中,ta表示攻击时间段,yi(t)表示t时刻的某个系统正常值,表示几何攻击的附加值。
33、优选的,所述的拒绝服务类攻击模型的建立过程包括
34、(1)设无人机的控制信号u(t)遭受攻击时,控制命令无法生效,将这个过程描述为式(18),即增加一个与u(t)相反的信号r(t):
35、
36、其中,r(t)为u(t)相反的信号;
37、(2)如果去人机的传感器信号y(t)遭受攻击,状态检测可能失效,将这个过程描述为式(19),即增加一个与y(t)相反的信号s(t):
38、
39、优选的,步骤s2.2所述的基于粒子滤波算法的攻击检测模型的建立过程包括
40、(1)设无人机系统的状态方程和观测方程为:
41、xk=f(xk-1,uk-1,vk-1) (23)
42、zk=h(xk,wk) (24)
43、其中,f(·)为系统状态转移函数,h(·)为状态观测函数,vk-1为状态噪声,wk为观测噪声,uk-1为k-1时刻的控制变量,xk为系统在k时刻的状态向量,zk为k时刻状态xk的观测值;
44、设k-1时刻的后验概率密度函数为p(xk-1|z1:k-1),其中z1:k-1为从开始时刻到k-1时刻的观测变量列,即z1:k-1={zi:i=1,2,…,k};
45、(2)预测过程
46、依据k-1时刻的后验概率密度p(xk-1|z1:k-1)和模型来预测状态xk出现的概率p(xk|z1:k-1),如式(25):
47、
48、(3)更新过程。
49、优选的,所述的更新过程包括
50、(1)根据式(24)得出zk后再对先验概率密度进行修正,由此得到k时刻的后验概率密度p(xk|z1:k-1),计算过程如式(26):
51、
52、其中,p(zk|z1:k-1)=∫p(zk|xk)p(xk|z1:k-1)dxk;
53、(2)设从后验概率中采样得到n个样本,后验概率的计算公式可表示为式(27):
54、
55、其中,δ(·)是狄拉克函数,公式满足
56、
57、(3)当样本点数接近于无穷大时,采样得到的结果近似为后验概率密度,就可以直接用这些采样的粒子状态的平均值作为最终的滤波结果,如式(30):
58、
59、其中,为每个粒子的状态函数值;
60、(4)在后验概率未知时,引入重要性采样,设某个已知的分布满足q(xk|z1:k),从其中进行采样时,式(30)为
61、
62、
63、又因为p(z1:k)=∫p(z1:k|xk)p(xk)dxk,得:
64、
65、(5)对期望的求解进行简化,根据q(xk|z1:k)的样本分布进行采样,使得采样到的n个样本满足然后用采样样本的状态平均值近似作为所求期望值,如式(33):
66、
67、(6)引入粒子滤波算法的权重递推形式,递推公式如下:
68、
69、(7)采用有效粒子数表示权值的退化程度,如式(35):
70、
71、其中,为粒子的权值方差,neff越小,权值方差越大,粒子权值退化程度越大,在实际计算中将有效粒子数的结果近似为:
72、
73、当neff小于阈值时,需要对权值退化现象进行控制,采用重采样方法找到新的粒子替换掉权重很小的无效粒子。
74、优选的,所述的利用重采样方法找到新的粒子替换掉权重很小的无效粒子的过程包括
75、(1)初始化:k=0时,从先验分布p(x0)中抽取初始化状态,得到n个采样粒子
76、(2)对于i=1,2,...循环执行(3)-(6);
77、(3)重要性采样:对于i=1,2,...,n,依据重要性概率密度进行采样获得粒子集
78、(4)计算权值并进行归一化处理:权值根据公式计算,之后再进行归一化处理得到
79、
80、(5)重采样:对粒子集进行重采样,获得新的粒子集
81、(6)状态估计:对k时刻状态进行估计,估计值为
82、基于粒子滤波算法的无人机攻击检测模型的应用,所述的基于粒子滤波算法的无人机攻击检测模型应用于检测无人机因遭受网络攻击产生的运行状态变化。
83、本发明的有益效果是:本发明公开了一种基于粒子滤波算法的无人机攻击检测模型的建立方法,与现有技术相比,本发明的改进之处在于:
84、本发明设计了一种基于粒子滤波算法的无人机攻击检测模型的建立方法,本方法首先基于控制论构建无人机cps模型,并引入对网络攻击行为的数学描述,完成基于信息物理融合概念的无人机cps网络安全威胁建模,然后通过将粒子滤波算法引入无人机cps网络安全威胁模型中,以识别网络安全威胁为目标,以无人机网络攻击检测为切入点,提出基于粒子滤波算法的无人机攻击检测模型,有效检测无人机因遭受网络攻击产生的运行状态变化,具有检测精度高和鲁棒性好的优点。
- 还没有人留言评论。精彩留言会获得点赞!