帧间预测方法及装置与流程
本发明涉及视频编解码领域,尤其涉及一种视频图像帧间预测方法、装置以及对应的编码器和解码器。
背景技术:
1、数字视频功能可以应用到各种装置中,包括数字电视、数字直播系统、无线广播系统、个人数字助理(personal digital assistant,pda)、笔记本电脑或台式计算机、平板电脑、电子书阅读器、数码相机、数字记录装置、数字媒体播放器、视频游戏装置、视频游戏控制台、蜂窝或卫星无线电电话(称为“智能手机”)、视频会议装置、视频流装置等。数字视频装置实现视频压缩技术,例如mpeg-2、mpeg-4、itu-t h.263、itu-t h.264/mpeg-4第10部分高级视频译码(advanced video coding,avc),视频译码标准h.265/高效视频译码(highefficiency video coding,hevc)标准,以及这些标准的扩展标准中所描述的视频压缩技术。视频装置可以通过实现此类视频压缩技术更有效地发送、接收、编码、解码和/或存储数字视频信息。
2、在视频压缩技术中,执行空间(帧内)预测和/或时间(帧间)预测以减少或去除视频序列中的固有冗余。对于基于块的视频译码,可以将视频条带(即视频帧或视频帧的一部分)分割为图像块,图像块也可以称为树块、译码单元(coding unit,cu)和/或译码节点。图像的待帧内译码(i)条带中的图像块是通过同一图像中相邻块中的参考像素点的空间预测进行译码的。对于图像的待帧间译码(p或b)条带中的图像块,可以使用同一图像中相邻块中的参考像素点的空间预测,或者使用其它参考图像中的参考像素点的时间预测。图像可以称为帧,参考图像可以称为参考帧。
技术实现思路
1、结合下文讨论的细节描述本发明的各种实施例和方面,附图示出了各种实施例。本发明的描述和附图是说明性的而非限制性的。描述的许多具体细节有助于透彻理解本发明的各种实施例。但是,在某些情况下,为了简明地讨论本发明的实施例,不再描述公知的或常规的细节。
2、在说明书中引用“一个实施例”或“实施例”意味着结合实施例描述的特定特征、结构或特性可以包含在本发明的至少一个实施例中。在说明书中各个地方出现的短语“在一个实施例中”不一定都指同一实施例。
3、本发明实施例提供一种视频图像帧间预测方法、装置以及对应的编码器和解码器,能够在一定程度上提高图像块的运动信息的预测准确性,从而提高编解码性能。
4、第一方面,描述了一种用于视频译码中的帧间预测的计算机实现的方法。在一个实施例中,该方法根据译码图像块的运动信息构建融合候选列表。运动信息定义了融合候选列表中的运动矢量预测值(motion vector predictor,mvp)候选。该方法包括当融合候选列表中的mvp候选的数量小于最大候选数量时,将新的运动信息作为新的mvp候选添加到融合候选列表中。该方法包括获取最优运动信息在融合候选列表中的位置的融合索引。该方法包括根据融合索引获取最优运动信息。该方法包括根据最优运动信息确定预测的当前图像块。
5、在一个实施例中,译码图像块在空间上或时间上与当前译码块相邻。
6、在一个实施例中,最优运动信息作为当前译码块的运动信息。
7、在一个实施例中,该方法还包括使用率失真成本从融合候选列表中确定最优运动信息。
8、在一个实施例中,当融合候选列表中的mvp候选的数量达到最大候选数量时,该方法还包括将成对平均候选运动信息添加到融合候选列表中。
9、在一个实施例中,成对平均候选运动信息定义成对平均候选,该成对平均候选是通过对融合候选列表中的预定义的一对mvp候选求平均值生成的。
10、在一个实施例中,最大候选数量为融合候选列表的最大候选数量减n,其中,n为正整数。
11、在一个实施例中,以预定候选扫描顺序将新运动信息添加到融合候选列表中。
12、在一个实施例中,译码图像块的时间候选运动信息是根据参考帧和当前帧的图像顺序计数对参考帧中对应的位置块的运动矢量进行缩放后获得的。
13、在一个实施例中,运动信息包括参考图像信息和运动矢量中的至少一个。
14、在一个实施例中,参考图像信息包括单向或双向预测信息、参考图像列表和与参考图像列表对应的参考图像索引中的至少一种。
15、在一个实施例中,在将新的运动信息作为新的mvp候选添加到融合候选列表中之前,该方法包括冗余度检查融合候选列表,以发现在融合候选列表中是否存在相同的mvp候选。在融合候选列表中发现相同的mvp候选之后,该方法包括从融合候选列表中删除相同的mvp候选,并向前移动融合候选列表中的剩余mvp候选。
16、第二方面,本技术实施例提供了一种帧间预测(计算机实现的)方法,包括:构建当前图像块的融合候选列表;当融合候选列表中的候选运动信息的数量小于融合候选列表的最大候选数量减n时,将hmvp候选运动信息添加到融合候选列表中,以获得新的融合候选列表,其中,n为正整数;获取当前图像块的融合索引;根据融合候选列表和融合索引获取当前图像块的运动信息;根据当前图像块的运动信息确定当前图像块的预测块。
17、预测块(predicted block)可以称为预测块(prediction block)。
18、当前图像块可以为译码块、译码单元或预测单元。
19、融合候选列表的最大候选数量可以称为融合运动矢量预测值(motion vectorpredictor,mvp)候选的最大数量。
20、hmvp候选运动信息可以称为基于历史的融合候选。
21、根据第二方面,在一些可能的实施例中,该方法还包括:当融合候选列表中的候选运动信息的数量大于或等于融合候选列表的最大候选数量减n时,将成对平均候选运动信息添加到融合候选列表中,以获得新的融合候选列表。
22、根据第二方面,在一些可能的实施例中,当融合候选列表中的候选运动信息的数量小于融合候选列表的最大候选数量减n时,将hmvp候选运动信息添加到融合候选列表中,以获得新的融合候选列表,包括:当融合候选列表中的候选运动信息的数量小于融合候选列表的最大候选数量时,将hmvp候选运动信息添加到融合候选列表中,以获得第一融合候选列表;当第一融合候选列表中的候选运动信息的数量小于融合候选列表的最大候选数量减n时,将新hmvp候选运动信息添加到第一融合候选列表中,以获得新的融合候选列表。
23、根据第二方面,在一些可能的实施例中,该方法还包括:当第一融合候选列表中的候选运动信息的数量大于或等于融合候选列表的最大候选数量减n时,将成对平均候选运动信息添加到第一融合候选列表中,以获得新的融合候选列表。
24、第三方面,本技术实施例提供了一种帧间预测装置,该帧间预测装置包括实现上述第一方面中任一种方法的功能单元。例如,帧间预测装置可以包括:构建单元,用于构建当前图像块的融合候选列表,当融合候选列表中的候选运动信息的数量小于融合候选列表的最大候选数量减n时,将hmvp候选运动信息添加到融合候选列表中,以获得新的融合候选列表,其中,n为正整数;预测块确定单元,用于获取当前图像块的融合索引;根据融合候选列表和融合索引获取当前图像块的运动信息;根据当前图像块的运动信息确定当前图像块的预测块。
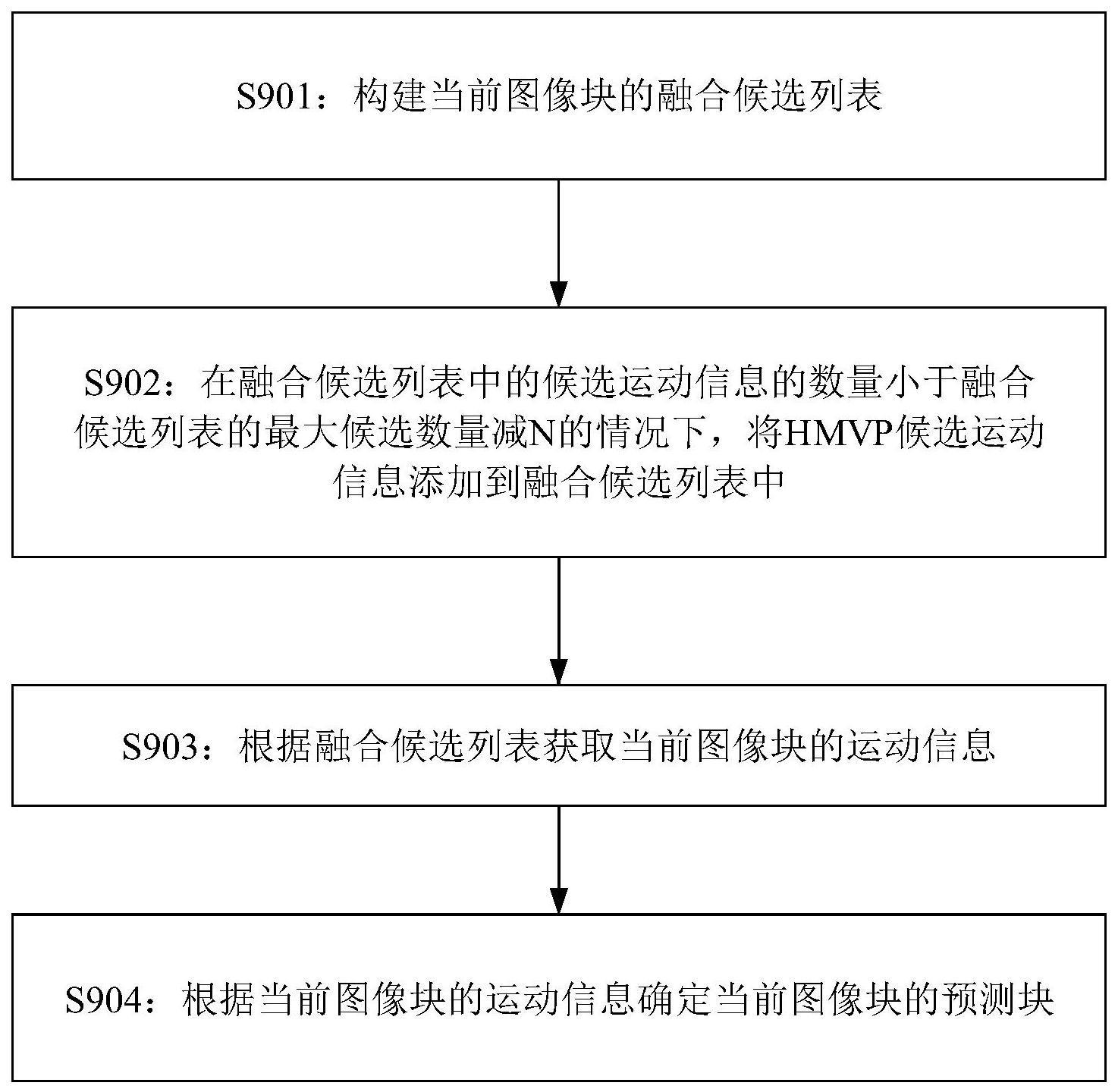
25、第四方面,本技术实施例提供了一种帧间预测(计算机实现的)方法,包括:构建当前图像块的融合候选列表;在融合候选列表中的候选运动信息的数量小于融合候选列表的最大候选数量减n的情况下,将hmvp候选运动信息添加到融合候选列表中,其中,n为正整数;根据融合候选列表获取当前图像块的运动信息;根据当前图像块的运动信息确定当前图像块的预测块。
26、其中,n可以为1、2或3。
27、根据融合候选列表获取当前图像块的运动信息可以包括:获取当前图像块的融合索引或所述融合候选列表的融合索引;根据融合候选列表和融合索引获取当前图像块的运动信息。获取当前图像块的融合索引或所述融合候选列表的融合索引可以包括:通过解析码流获取融合索引。根据融合候选列表和融合索引获取当前图像块的运动信息可以包括:通过融合索引从融合候选列表中获取运动信息。融合索引可以用于指示运动信息在融合候选列表中的位置。
28、运动信息可以包括一个或两个运动矢量。
29、运动信息还可以包括一个或两个参考图像列表中与一个或多个运动矢量相关的参考图像索引、单向或双向预测信息,或与一个或多个运动矢量相关的一个或多个mvd(motion vector difference,运动矢量差值)。
30、根据融合候选列表获取当前图像块的运动信息可以包括:使用率失真成本从融合候选列表中确定运动信息。该方法还可以包括:将融合索引编码到码流中的融合候选列表。
31、预测块(predicted block)可以称为预测块(prediction block)。
32、当前图像块可以为译码块、译码单元或预测单元。
33、融合候选列表的最大候选数量可以称为融合运动矢量预测值(motion vectorpredictor,mvp)候选的最大数量。
34、hmvp候选运动信息可以称为基于历史的融合候选或基于历史的mvp(history-based mvp,hmvp)融合候选。
35、根据第四方面,在该方法的一个可能的实施例中,该方法还包括:在融合候选列表中的候选运动信息的数量等于融合候选列表的最大候选数量减n的情况下,将成对平均的候选运动信息添加到融合候选列表中。
36、成对平均候选运动信息是通过对融合候选列表中预定义的一对mvp候选求平均值生成的。
37、成对平均候选运动信息可以称为成对平均候选。
38、第五方面,描述了一种帧间预测装置。该帧间预测装置包括实现上述第一方面中任一种方法的功能单元。例如,帧间预测装置可以包括构建单元,构建单元用于:根据译码图像块的运动信息构建融合候选列表,其中,运动信息定义了融合候选列表中的mvp候选;当融合候选列表中的mvp候选的数量小于最大候选数量时,将新的运动信息作为新的mvp候选添加到融合候选列表中。该帧间预测装置还可以包括预测块确定单元,预测块确定单元用于:获取最优运动信息在融合候选列表中的位置的融合索引;根据融合索引获取最优运动信息;根据最优运动信息确定预测的当前图像块。
39、在一些实施例中,例如,图像预测装置应用于视频编码装置(例如,视频编码器)或视频解码装置(例如,视频解码器)。
40、本发明第一方面的方法可以由本技术第五方面的装置执行。本技术第五方面的装置的其它特征和实施例对应本技术第一方面的装置的特征和实施例。
41、第六方面,描述了一种帧间预测装置。该帧间预测装置包括实现上述第四方面中任一种方法的功能单元。例如,帧间预测装置可以包括:构建单元,构建单元用于:构建当前图像块的融合候选列表;在融合候选列表中的候选运动信息的数量小于融合候选列表的最大候选数量减n的情况下,将hmvp候选运动信息添加到融合候选列表中,其中,n为正整数;预测单元,预测单元用于:获取当前图像块的融合索引;根据融合候选列表和融合索引获取当前图像块的运动信息;根据当前图像块的运动信息确定当前图像块的预测块。
42、根据第六方面,在该装置的一个可能的实施例中,该构建单元还用于:在融合候选列表中的候选运动信息的数量等于融合候选列表的最大候选数量减n的情况下,将成对平均的候选运动信息添加到融合候选列表中。
43、成对平均候选运动信息是通过对融合候选列表中预定义的一对mvp候选求平均值生成的。
44、在第六方面或第六方面的任一前述实施例的装置的可能的实施例中,预测单元用于:通过融合索引从融合候选列表中获取运动信息。
45、在第六方面或第六方面的任一前述实施例的装置的可能的实施例中,预测单元用于:通过使用融合索引从融合候选列表中获取运动信息。
46、在一些实施例中,例如,图像预测装置应用于视频编码装置(例如,视频编码器)或视频解码装置(例如,视频解码器)。
47、本发明第四方面的方法可以由本技术第六方面的装置执行。本技术第六方面的装置的其它特征和实施例对应本技术第四方面的装置的特征和实施例。
48、第七方面,描述了一种图像预测装置。该装置包括处理器和耦合到处理器的存储器,处理器用于执行第一方面至第四方面或第一方面至第四方面的任一实施例中的方法。
49、第八方面,描述了一种视频解码设备。该视频解码设备包括非易失性存储介质和处理器,非易失性存储介质存储有可执行程序,处理器与非易失性存储介质耦合,处理器执行可执行程序,以实现上述第一方面至第四方面或第一方面至第四方面的任一实施例中的方法。
50、第九方面,描述了一种计算机可读存储介质。该计算机可读存储介质中存储有编程指令,当该指令在计算机上运行时,使得计算机执行第一方面至第四方面或第一方面至第四方面的实施例中的方法。
51、第十方面,描述了一种包含编程指令的计算机程序产品。当该计算机程序产品在计算机上运行时,使得计算机执行第一方面至第四方面或第一方面至第四方面的实施例中的方法。
52、第十一方面,本技术实施例提供了一种包括程序代码的计算机程序,当该计算机程序在计算机上执行时,使得计算机执行第一方面至第四方面或第一方面至第四方面的任一可能的实施例中的方法。
53、根据第七方面,描述一种用于视频译码中的帧间预测的计算机实现的方法。在一个实施例中,该方法根据译码图像块的运动信息构建融合候选列表。运动信息定义了融合候选列表中的运动矢量预测值(motion vector predictor,mvp)候选。当融合候选列表中的mvp候选的数量小于第一最大候选数量时,该方法包括将基于历史的运动矢量预测值(history-based motion vector predictor,hmvp)候选运动信息添加到融合候选列表中,以获得第一融合候选列表。当第一融合候选列表中的mvp候选的数量小于第二最大候选数量时,该方法包括将新hmvp候选运动信息添加到第一融合候选列表中,以获得新的融合候选列表。该方法包括获取最优运动信息在新的融合候选列表中的位置的融合索引。该方法包括根据融合索引获取最优运动信息。该方法包括根据最优运动信息确定预测的当前图像块。
54、应理解,各个方面以及对应的可实现的设计方式所获得的有益效果是相似的,本文不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!