一种无人车控制系统和方法、数据传输方法与流程
本技术涉及车辆控制,特别涉及一种无人车控制系统和方法、数据传输方法。
背景技术:
1、随着自动驾驶技术的不断突破,无人车逐渐出现在大众视野中。在无人车的自动驾驶过程中可能会发生各种无人车自身无法处理的突发状况,而导致无人车无法正常行驶,影响周围交通。因此,在发生突发情况时,仍需要人为通过远程驾驶端来对无人车进行远程驾驶,以对突发情况进行及时处理。然而,通过远程驾驶端控制无人车时,如果远程驾驶端和无人车端之间的数据传输时延较大,则无法保证数据的真实性和实时性,从而会对远程驾驶的安全性和稳定性造成影响。
2、因此,如何在对无人车进行远程驾驶时降低无人车端与远程驾驶端之间的数据传输时延是目前亟需解决的问题。
技术实现思路
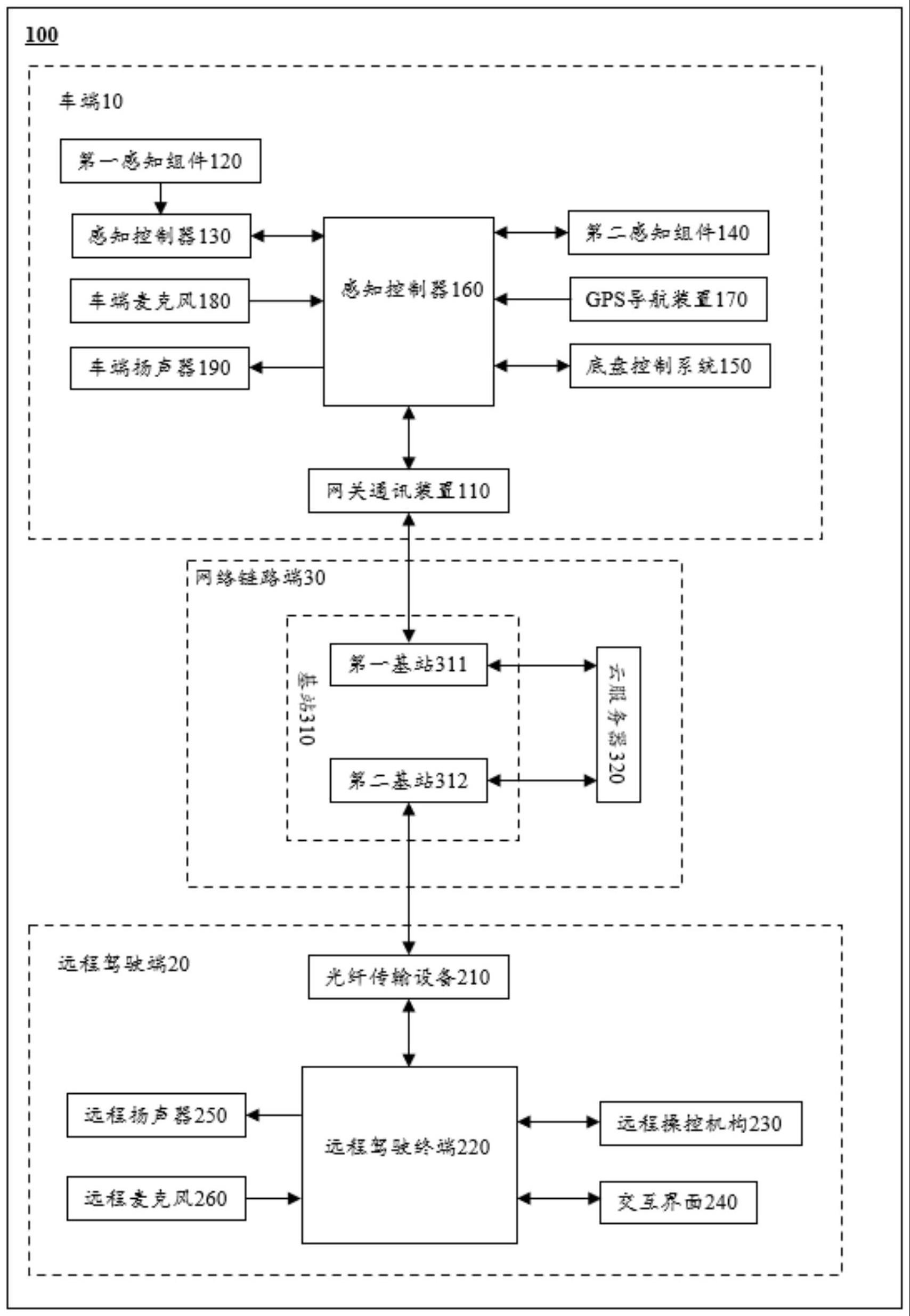
1、本技术实施例之一提供一种无人车控制系统,包括车端和远程驾驶端;所述车端包括网关通讯装置,所述网关通讯装置包括:网络接入模块,所述网络接入模块包括多个物联网卡,所述多个物联网卡用于分别接入多个不同的运营商网络;网络信号检测模块,用于检测所述车端当前所在区域的所述多个不同的运营商网络的信号强度;数据分配模块,用于基于所述多个不同的运营商网络的信号强度,将目标数据在所述多个不同的运营商网络之间进行分配;数据传输模块,用于将分配后的目标数据分别通过所述多个不同的运营商网络在所述车端和所述远程驾驶端之间进行传输;其中,所述目标数据为需要在所述车端和所述远程驾驶端之间传输的数据,所述目标数据至少包括从所述车端发送至所述远程驾驶端的所述车端的环境数据、状态数据以及从所述远程驾驶端发送至所述车端的控制指令数据。
2、在一些实施例中,所述车端还包括:第一感知组件,用于获取所述车端的第一环境数据,所述第一环境数据包括所述车端周围的障碍物信息;感知控制器,与所述第一感知组件连接,用于接收来自所述第一感知组件的所述第一环境数据;第二感知组件,用于获取所述车端的第二环境数据,所述第二环境数据包括所述车端周围环境的图像;底盘控制系统,用于获取所述车端的状态数据,所述状态数据包括所述车端的车速、扭矩、方向盘转角、胎压、马达转速和充电状态中的至少一种;tbox控制器,所述tbox控制器与所述感知控制器、所述第二感知组件以及所述底盘控制系统连接,以用于分别接收来自所述感知控制器的所述第一环境数据、来自所述第二感知组件的所述第二环境数据以及连来自所述底盘控制系统的所述状态数据。
3、在一些实施例中,所述第一感知组件包括至少四个超声波雷达、至少两个多线激光雷达和至少两个单线激光雷达;其中,所述至少四个超声波雷达分别安装在所述车端的车身的四周,所述至少两个多线激光雷达分别安装在所述车端的车头两侧,所述至少两个单线激光雷达分别安装在所述车端的车身的正前方和正后方。
4、在一些实施例中,所述第二感知组件包括至少四个摄像头,所述至少四个摄像头分别安装在所述车端的车身的正前方、正后方、正左方和正右方。
5、在一些实施例中,所述底盘控制系统包括多个执行系统,所述多个执行系统能够获取所述车端的状态数据。
6、在一些实施例中,所述车端还包括gps导航装置,所述gps导航装置用于获取所述车端的第三环境数据,所述第三环境数据包括所述车端的位置信息;所述tbox控制器还与所述gps导航装置连接,所述tbox控制器还用于接收来自所述gps导航装置的所述第三环境数据。
7、在一些实施例中,所述tbox控制器与所述网关通讯装置连接,使得所述tbox控制器能够向所述远程驾驶端发送所述车端的环境数据和状态数据,以及接收来自所述远程驾驶端的控制指令数据。
8、在一些实施例中,所述远程驾驶端包括:远程驾驶终端,用于接收来自所述tbox控制器的所述车端的环境数据和状态数据;远程操控机构,所述远程操控机构与所述远程驾驶终端连接,所述远程驾驶端基于所述车端的环境数据和状态数据操控所述远程操控机构生成所述控制指令数据并发送至所述远程驾驶终端,所述远程驾驶终端将所述控制指令数据发送至所述tbox控制器;所述控制指令数据至少用于控制所述车端执行驾驶动作,所述驾驶动作至少包括换挡、减速、刹车、加速、转向或急停。
9、在一些实施例中,所述tbox控制器将所述控制指令数据发送至所述底盘控制系统,所述底盘控制系统基于所述控制指令数据执行所述驾驶动作。
10、在一些实施例中,所述远程驾驶端还包括交互界面,所述交互界面与所述远程驾驶终端连接,远程驾驶终端能够将所述车端的环境数据和状态数据发送至交互界面进行显示。
11、在一些实施例中,所述远程驾驶端还包括远程扬声器和远程麦克风,所述远程扬声器和所述远程麦克风与所述远程驾驶终端连接;所述车端还包括车端麦克风和车端扬声器,所述车端麦克风和所述车端扬声器与所述tbox控制器连接;其中,所述远程麦克风用于获取所述远程驾驶端的音频数据,并依次通过所述远程驾驶终端、所述tbox控制器发送至所述车端扬声器进行播放;所述车端麦克风用于获取所述车端的音频数据,并依次通过所述tbox控制器、所述远程驾驶终端发送至所述远程扬声器进行播放。
12、本技术实施例之一提供一种数据传输方法,应用于上述任一实施例所述的无人车控制系统中的车端和远程驾驶端之间的目标数据传输,其特征在于,包括:使所述车端接入多个不同的运营商网络;检测所述车端当前所在区域的所述多个不同的运营商网络的信号强度;基于所述多个不同的运营商网络的信号强度,将目标数据在所述多个不同的运营商网络之间进行分配;将分配后的目标数据分别通过所述多个不同的运营商网络在所述车端和所述远程驾驶端之间进行传输。
13、在一些实施例中,当所述目标数据为图像数据时,在传输所述目标数据之前,所述方法还包括:基于所述多个不同的运营商网络总的信号强度设置视频编码参数;基于所述视频编码参数对所述图像数据进行视频编码。
14、本技术实施例之一提供一种无人车控制方法,应用于上述实施例所述的无人车控制系统,包括:确定所述车端是否需要进入远程驾驶模式;若需要,所述车端向所述远程驾驶端发送请求所述远程驾驶端介入的指令;所述车端向所述远程驾驶端发送所述车端的环境数据和状态数据;所述远程驾驶端基于所述车端的环境数据和状态数据生成控制指令数据,并发送至所述车端;所述车端基于所述控制指令数据执行控制动作。
15、在一些实施例中,无人车控制方法还包括:当所述远程驾驶端检测到所述控制指令数据在第一时间内未发生变化时,所述车端退出远程驾驶模式。
16、在一些实施例中,无人车控制方法还包括:当所述远程驾驶端检测到所述车端和所述远程驾驶端之间的目标数据传输延迟超过延迟阈值时,所述车端退出远程驾驶模式。
17、本技术实施例提供的无人车控制系统以及数据传输方法,能够根据多个运营商网络的信号强度将车端和远程驾驶端之间待传输的目标数据在多个运营商网络之间进行分配,使得分配后的目标数据能够分别通过多个运营商网络在远程驾驶端和车端之间进行传输,这样可以有效降低车端和远程驾驶端之间的数据传输的时延,保证数据传输的真实性和实时性,从而提高远程驾驶端对车端远程驾驶控制的安全性;本技术实施例提供的无人车控制方法可提供了车端在远程驾驶模式下的各种应急处理措施,从而可以提高车端在远程驾驶模式下的安全性。
- 还没有人留言评论。精彩留言会获得点赞!