一种基于毫米波波束模式轨迹的室内3D指纹定位方法及系统
本发明属于室内定位,涉及一种基于毫米波波束模式轨迹的室内3d指纹定位方法及系统。
背景技术:
1、随着社会经济的发展和技术的进步,定位技术的应用也越加广泛。目前,现有的定位技术主要有:gps定位,通过卫星定位;指纹识别定位,建立指纹数据库,在线进行匹配;邻近探测,探测周边范围的物理信号;极点定位,以圆的特性,测量节点距离与角度信息;三角定位,测量两个节点的距离与角度;多边定位,测量方程个数大于节点数,使用最小二乘算法求解;质心定位,求周围节点的横纵平均值;航迹推算:以起始位置,对应步长,航向不断累加推算。
2、上述定位技术各有各的优势,也存在自身的局限性,主要体现在:(1)根据目前的研究,由于室内环境障碍物的阻塞,信号会发生反射,折射或者散射,穿过物体时信号强度会减弱,因此现有基于卫星信号的定位技术难以有效定位室内物体位置。(2)室内定位技术如航迹推算,多边定位,质心定位等技术,成本较低,但是均会有定位精度较低的问题。(3)而室内定位技术如指纹识别定位,邻近探测,极点定位,三角定位,均需要精密的仪器进行辅助,以达到定位的精准度,但是成本较高,开销较大。
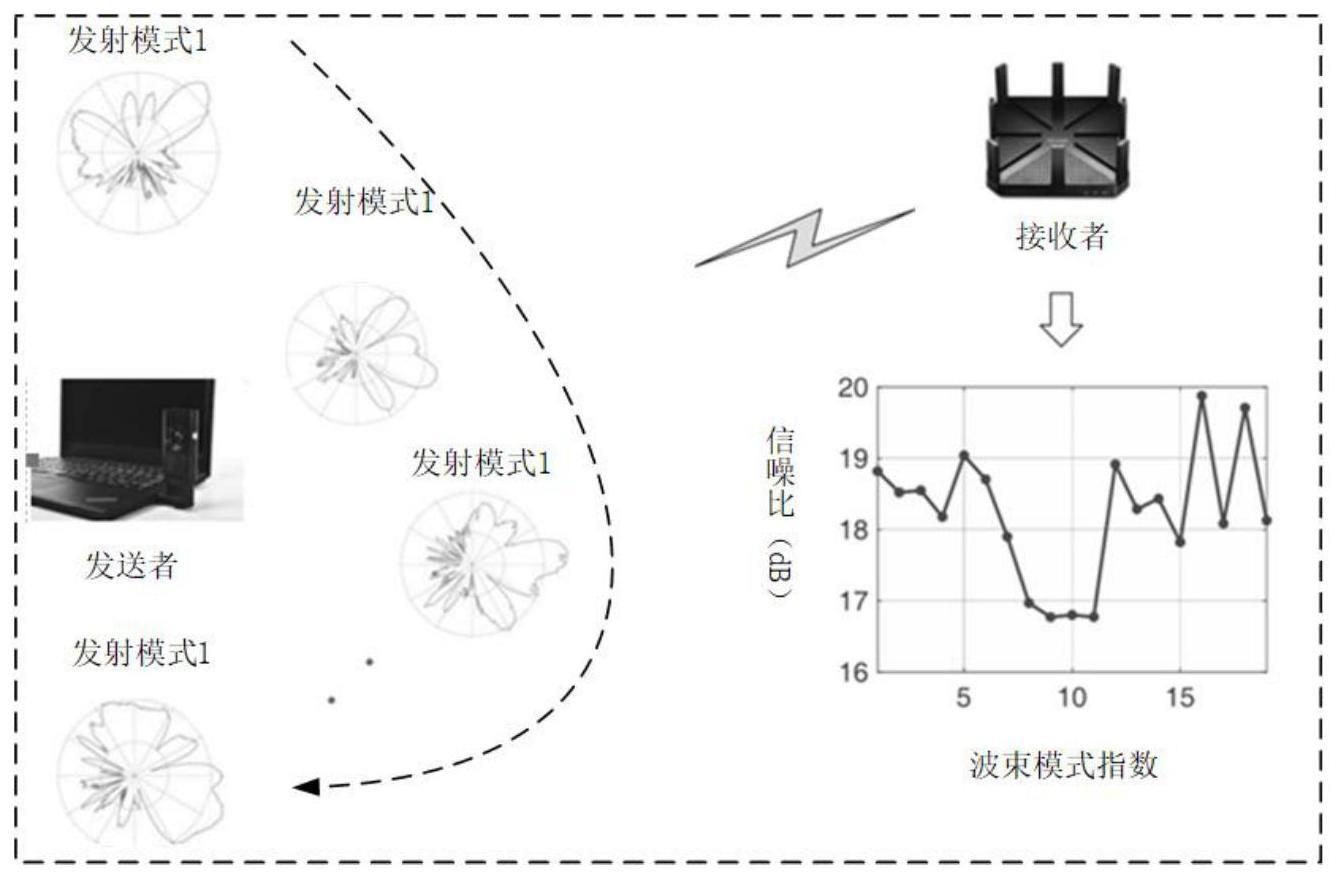
3、毫米波通信技术是未来5g,6g主要发展趋势,毫米波高频通信也具有与传统通信所不一样的独特特性。毫米波技术作为5g移动通信的关键技术之一,可以为室内定位提供更加精确的几何信息,极大地减少了多径效应带来的影响。首先,由于毫米波系统具有非常大的带宽,因此可以获得较高的时间分辨率,从而可以获得更加精确的距离估计值;其次,毫米波的窄波束极大地提高了空间角度的分辨率,因此可以获得更加精确的角度测量值;另外,由于毫米波受大气吸收影响严重,在大气中衰减速度快,这一特性使得毫米波信道稀疏,多径干扰小且多径易于区分;最后,由于频段高,干扰源很少,使得信号传播稳定可靠。毫米波的上述特点使得无线信号多径分辨性更好,具有更高精度的定位潜力。
4、由于毫米波通信的对空间方向的敏感性等独特特性,在正常通信的过程中,就可以获知信号方向的来源,服务器根据连接到自己的客户端设备数据进行计算可以得到客户端设备的角度,距离,高度。实现3d模型的精确定位,实现通信与位置感知一体化,可以大大简化导航定位实现复杂度,实现高精度3d室内定位。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于毫米波波束模式轨迹的室内3d指纹定位方法及系统,在实现通信的过程中同时完成3d定位感知过程,属于通信感知一体化技术。
2、为达到上述目的,本发明提供如下技术方案:
3、一种基于毫米波波束模式轨迹的室内3d指纹定位方法,该方法通过建立针对通信双方特定位置的波束模式轨迹信息,建立方向指纹,利用两台毫米波接收设备已知的间距信息,计算出特定发送设备的3d位置,实现高精度室内3d定位;该方法包括以下步骤:
4、s1、进行预定义设备;
5、s2、进行室内定位。
6、进一步,在步骤s1中的预定义设备阶段,具体包括:
7、模型建立阶段:预定义一台接入点ap1和另一台接入点ap2,记录ap1与ap2之间的距离,并定义两接入点之间的连线为0度角;
8、模型开启后:毫米波5g/6g设备ap1首先扫描自己波束方向特征,通过毫米波扇区扫描,每个角度均可扫描出一个具有唯一性的beampatten index,通过对每个角度的扫描,建立ap1_ap2毫米波通信天线扇区特征数据库。
9、进一步,在步骤s2中的室内定位阶段,具体包括:
10、s21、在一个平面内,n个ap获取n个站点随机位置的信号到达方向角,每个ap产生n个方向信号到达角样本数据;
11、s22、每个ap会将自己的到达角样本数据广播给其他ap,其他每个ap将接收到的n个站点随机位置信号到达角方向数据与自己本地与之对应的n个样本信号到达角数据输入构造的欧氏距离计算生成器中;
12、s23、对于步骤s21中的已知n个方向信号到达角数据,步骤s22中ap用自己n个本地数据与之结合,ap依次计算每一个站点与自己的欧式距离,获取到n个站点的位置标签;
13、s24、构造一个信号位置标签优化生成器,将步骤s23中的计算结果,每个站点的n个ap位置标签作为信号位置标签优化生成器的输入,优化站点位置参数,使生成器对应的输出向量与样本向量之间的误差最小,构造信号到达角计算损失函数;
14、s25、将步骤s23与步骤s24反复迭代,直至收敛,此时每个样本向量的标签估计值达到最优,得到站点位置坐标的最优估计,实现毫米波室内定位。
15、进一步,在步骤s23中,位置标签的生成具体包括:
16、1)站点(station)在移动或静止过程中会与两个接入点ap1、ap2通信,预定义服务器ap1与ap2的位置,以ap1,ap2的连接线建立x轴,ap1为中心点,建立y轴,已知它们之间的距离l1、他们之间的夹角ε,根据毫米波方向性波束特性,在通信过程中测量出ap与站点的夹角tap1,tap2,即可求出角度α,β;ap与站点通信扫描生成波束方向图后,ap1查询数据库中此波束方向图的夹角获得tap1,ap2查询数据库中此波束方向图的夹角获得tap2,即:
17、
18、
19、2)已知ap1与ap2之间的距离l1,首先通过以下公式计算ap与站点之间在二维平面的距离l2;
20、
21、3)二维平面h如上述可计算出第n个ap接入的站点i的l2的长度,由毫米波5g/6g通信特性,可知三维平面仰角ε,可根据l2与仰角ε求出3d模型下第n个ap与站点i的距离l3:
22、
23、从而步骤s24中的损失函数计算如下:
24、
25、本发明还提供了一种基于毫米波波束模式轨迹的室内3d指纹定位系统。
26、本发明的有益效果在于:
27、1)低开销:无需复杂的信号处理或特征提取,通信过程中既可获得通信对方的位置角度信息,无需高端的精密仪器测量station的距离,接入点ap在绝大多数情况下是不会移动的,只需在第一次开机是测量ap之间的位置,即可定位station。
28、2)3d定位:现有通信技术大多是二维平面对设备进行定位跟踪,本发明利用毫米波5g/6g通信的独特特性,能够对毫米波5g/6g设备station实现3d世界的精确定位。
29、3)通信感知一体化:可以在毫米波5g/6g设备互相通信的同时,对其进行定位,不需要设计额外的技术和时间花销对设备进行定位,简洁便利,十分适应当今智能家居,智能工厂,车联网等物联网技术环境。
30、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!