一种时间同步性监控方法及装置与流程
本技术涉及车辆,尤其涉及一种时间同步性监控方法及装置。
背景技术:
1、融合模块在对各传感器数据进行融合前应该保证传感器数据的时间同步,当前对于传感器的时间同步方案为,依据autosar4.3.0规定的时间同步机制。域控制器作为主节点需实时向从节点发送时间同步信号,从节点收到时间同步信号后主动计算延时,每一帧雷达信号发送时附带时间戳信号。虽然目前使用的时间同步方案在一定程度上可以保证传感器与域控的时间同步性,但也无法确定时间是否同步。
2、综上所述,如何对时间同步性进行监控是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本技术提供了一种时间同步性监控方法及装置,旨在对时间同步性进行监控。
2、第一方面,本技术提供了一种时间同步性监控方法,包括:
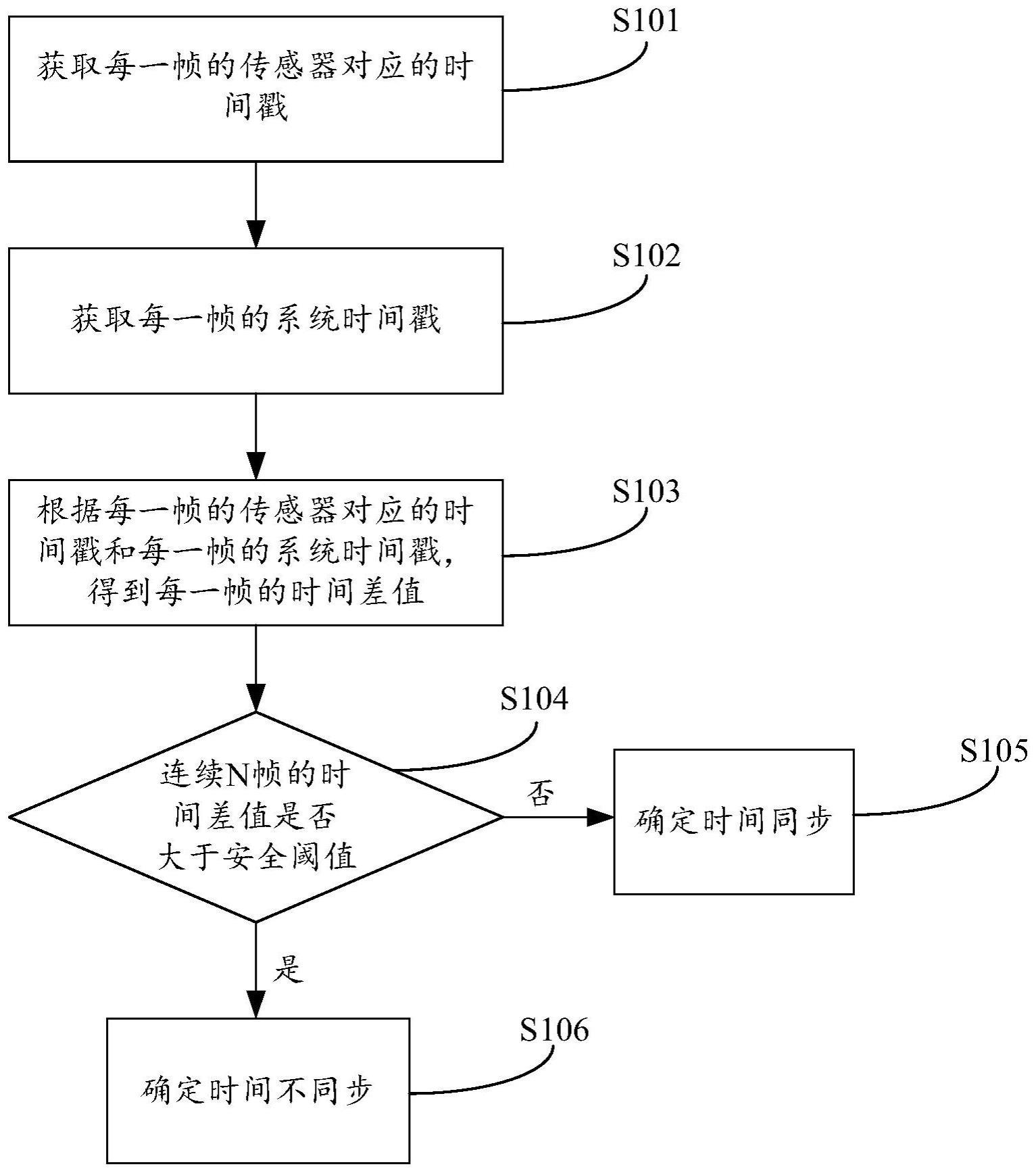
3、获取每一帧的传感器对应的时间戳;
4、获取每一帧的系统时间戳;
5、根据所述每一帧的传感器对应的时间戳和所述每一帧的系统时间戳,得到每一帧的时间差值;
6、若连续n帧的时间差值大于安全阈值,则确定时间不同步,其中n为正整数;
7、若无连续n帧的时间差值大于所述安全阈值,则确定时间同步。
8、可选的,所述根据所述每一帧的传感器对应的时间戳和所述每一帧的系统时间戳,得到每一帧的时间差值,包括:
9、将每一帧对应的时间戳与系统时间戳相减,得到所述每一帧的时间差值。
10、可选的,所述传感器包括摄像头、激光雷达以及毫米波雷达。
11、可选的,所述方法还包括:
12、在第一时刻利用所述摄像头获取本车与静止目标之间的距离,记为第一距离;
13、在所述第一时刻利用所述激光雷达获取所述本车与所述静止目标之间的距离,记为第二距离;
14、在所述第一时刻利用所述毫米波雷达获取所述本车与所述静止目标之间的距离,记为第三距离;
15、在第二时刻利用所述摄像头获取所述本车与所述静止目标之间的距离,记为第四距离,所述第二时刻是所述第一时刻之后的时刻;
16、在所述第二时刻利用所述激光雷达获取所述本车与所述静止目标之间的距离,记为第五距离;
17、在所述第二时刻利用所述毫米波雷达获取所述本车与所述静止目标之间的距离,记为第六距离;
18、根据所述第一距离、所述第二距离、所述第三距离、所述第四距离、所述第五距离以及所述第六距离,确定时间同步性。
19、可选的,所述根据所述第一距离、所述第二距离、所述第三距离、所述第四距离、所述第五距离以及所述第六距离,确定时间同步性,包括:
20、判断所述第一距离与所述第四距离之差,是否与所述第二距离与所述第五距离之差,以及所述第三距离与所述第六距离之差相等;
21、若是,则确定时间同步;
22、若否,则确定时间不同步。
23、可选的,所述确定时间不同步之后,所述方法还包括:
24、若最小系统中包含所述传感器,则确定所述最小系统不可用。
25、可选的,所述方法还包括:
26、若最大系统中包含所述传感器,则不将所述传感器获取的数据进行融合,所述最大系统可用。
27、第二方面,本技术提供了一种时间同步性监控装置,包括:
28、第一获取模块,用于获取每一帧的传感器对应的时间戳;
29、第二获取模块,用于获取每一帧的系统时间戳;
30、生成模块,用于根据所述每一帧的传感器对应的时间戳和所述每一帧的系统时间戳,得到每一帧的时间差值;
31、第一确定模块,用于若连续n帧的时间差值大于安全阈值,则确定时间不同步,其中n为正整数;
32、第二确定模块,用于若无连续n帧的时间差值大于所述安全阈值,则确定时间同步。
33、可选的,所述生成模块具体用于:
34、将每一帧对应的时间戳与系统时间戳相减,得到所述每一帧的时间差值。
35、可选的,所述传感器包括摄像头、激光雷达以及毫米波雷达。
36、可选的,所述装置还包括:
37、第三获取模块,用于在第一时刻利用所述摄像头获取本车与静止目标之间的距离,记为第一距离;
38、第四获取模块,用于在所述第一时刻利用所述激光雷达获取所述本车与所述静止目标之间的距离,记为第二距离;
39、第五获取模块,用于在所述第一时刻利用所述毫米波雷达获取所述本车与所述静止目标之间的距离,记为第三距离;
40、第六获取模块,用于在第二时刻利用所述摄像头获取所述本车与所述静止目标之间的距离,记为第四距离,所述第二时刻是所述第一时刻之后的时刻;
41、第七获取模块,用于在所述第二时刻利用所述激光雷达获取所述本车与所述静止目标之间的距离,记为第五距离;
42、第八获取模块,用于在所述第二时刻利用所述毫米波雷达获取所述本车与所述静止目标之间的距离,记为第六距离;
43、第三确定模块,用于根据所述第一距离、所述第二距离、所述第三距离、所述第四距离、所述第五距离以及所述第六距离,确定时间同步性。
44、可选的,所述第三确定模块,包括:
45、判断单元,用于判断所述第一距离与所述第四距离之差,是否与所述第二距离与所述第五距离之差,以及所述第三距离与所述第六距离之差相等;
46、第一确定单元,用于若是,则确定时间同步;
47、第二确定单元,用于若否,则确定时间不同步。
48、可选的,所述装置还包括:
49、第四确定模块,用于若确定时间不同步,最小系统中包含所述传感器,则确定所述最小系统不可用;
50、可选的,所述装置还包括:
51、第五确定模块,用于若确定时间不同步,最大系统中包含所述传感器,则不将所述传感器获取的数据进行融合,所述最大系统可用。
52、第三方面,本技术实施例提供一种计算机设备,包括:存储器,处理器,及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现如本技术实施例第一方面中任一项所述的时间同步性监控方法。
53、第四方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当所述指令在终端设备上运行时,使得所述终端设备执行如本技术实施例第一方面中任一项所述的时间同步性监控方法。
54、本技术提供了一种时间同步性监控方法。在执行所述方法时,先获取每一帧的传感器对应的时间戳,后获取每一帧的系统时间戳,然后根据每一帧的传感器对应的时间戳和每一帧的系统时间戳,得到每一帧的时间差值,最后若连续n帧的时间差值大于安全阈值,则确定时间不同步,其中n为正整数;若无连续n帧的时间差值大于安全阈值,则确定时间同步。这样,通过比对传感器时间戳和系统时间戳,以对时间同步性进行监控。
- 还没有人留言评论。精彩留言会获得点赞!