一种基于多星协作的信息通信和位置感知一体化设计方法
本发明涉及无线通信领域,尤其涉及一种基于多星协作的信息通信和位置感知一体化设计方法。
背景技术:
1、近年来,随着卫星通信和定位技术的不断进步,科学家们一直都在追求更高效、准确和可靠的系统。传统的信息通信和位置感知系统是相互独立的,这使得它们在功能、成本和效率上都有一定的限制。例如,通信系统需要大量功率消耗来传输信号,而位置感知系统(如全球定位系统)则需要依赖于精确的时间和距离测量,这在复杂的环境中很难实现。在这种背景下,学术界和工业界开始考虑将通信和位置感知一体化,以提高系统的性能和效率。这种一体化的方法可以使得信息通信和位置感知系统共享频谱、时间和空间等资源,从而减少成本和能耗。
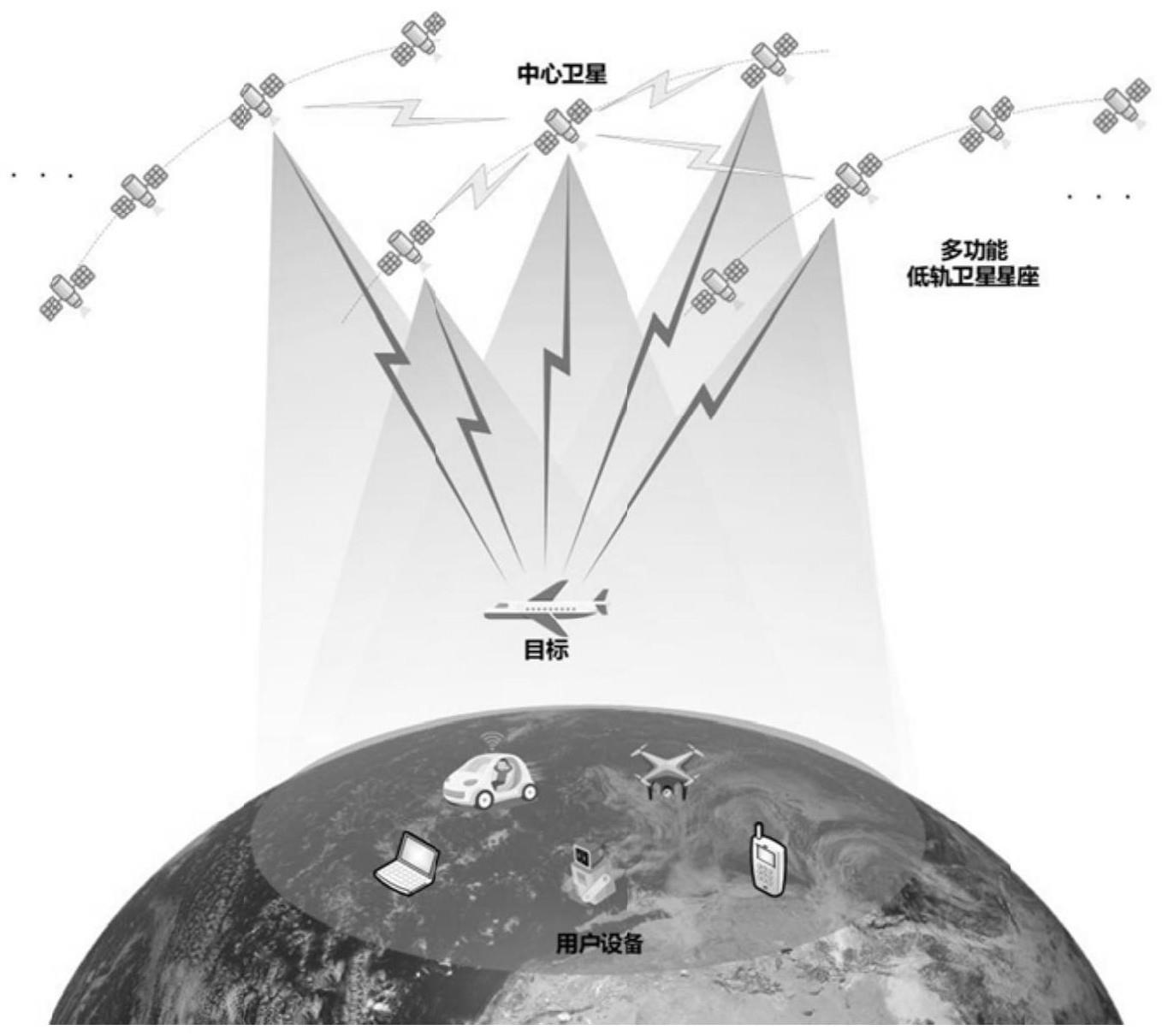
2、目前,现有的一体化方法大多基于地面基站或单一的卫星系统,这在一定程度上限制了它们的覆盖范围和性能。为了解决这个问题,6g天地一体化网络的新思路是建立多功能低轨卫星星座,通过多颗卫星的协同工作,提高信息通信和位置感知的准确性和可靠性,实现更加高效的数据传输和定位服务,这种方法具有覆盖范围广、传输速度快、抗干扰能力强等优势,是未来卫星通信和定位技术发展的重要方向。
3、因此,为6g天地一体化网络提供一种有效的多星协作的信息通信和位置感知一体化设计方法,有望在军事方面为军队提供更加准确和可靠的通信和定位服务,在民用方面作用于智慧交通、物流配送、环境监测、自然灾害预警等领域,为人类社会带来更加高效、便捷、安全的通信和信息服务。
技术实现思路
1、本发明的目的是为了满足日益增长的通信和定位需求,解决传统相互独立的信息通信和位置感知系统和单一卫星系统面临的成本高、能耗大、覆盖范围和性能不足等问题,提出了一种有效的信息通信和位置感知一体化设计方法。
2、本发明所采用的具体技术方案如下:
3、一种基于多星协作的信息通信和位置感知一体化设计方法,包括如下步骤:
4、1)在多星协作系统中部署k颗配备有n维均匀面天线阵列的多功能低轨卫星;所部署的低轨卫星中包含1颗中心卫星和(k-1)颗附属卫星,并共同服务覆盖范围内m个单天线用户设备和感知感兴趣的目标物体;
5、2)所述中心卫星与所述附属卫星预先建立星间链路,并通过估计或反馈获得第k个低轨卫星到第m个用户设备的星地信道状态信息hk,m;
6、3)所述中心卫星作为控制中心,根据获得的星地信道状态信息,利用一种信息通信和位置感知一体化波束和波形设计方法为所有部署的低轨卫星联合设计通信信号发射波束和感知信号波形,并将设计方案通过星间链路传至各所述附属卫星;
7、4)所述中心卫星和所有所述附属卫星根据获得的设计方案构建并发射信息通信-位置感知双功能信号,一方面地面用户设备解码经过星地下行链路接收到的通信信号,另一方面每个低轨卫星接收到含有目标位置信息的反射信号并通过星间链路传输至所述中心卫星进行信号融合;
8、5)所述中心卫星根据融合后的目标信号,利用一种基于粒子群算法的直接定位方法,获得目标三维坐标位置。
9、作为优选,所述步骤3)中,一种信息通信和位置感知一体化波束和波形设计方法具体如下:
10、31)所述中心卫星为第k颗低轨卫星设计通信信号和位置感知信号叠加的双功能广播信号其中wk,m为第k颗低轨卫星对第m个用户的通信波束,sm为面向第m个用户的零均值单位功率通信信号,rk为第k颗低轨卫星的感知波形;
11、32)计算得到第i个用户设备的通信传输速率其中wm=[w1,m;…wk,m…;wk,m]、r=[r1;…rk…;rk]、hm=[h1,m;…hk,m…;hk,m],为第i个用户设备接收到高斯白噪声的方差,|·|2表示绝对值的平方;
12、33)定义中间变量r=rrh、和定义根据传输速率限制,令其中tr(·)表示矩阵的迹,ηi为第i个用户设备的最低传输速率要求;
13、34)引入中间变量其中,为一阶泰勒展开点,<x·y>=tr(xτy)代表矩阵x与矩阵y的内积,传输速率限制转换为ηi+z′i-z″i≤0;
14、35)根据低轨卫星发射功率限制,令其中为第k颗低轨卫星的最大发射功率预算,[0,…,1,…,0]为只有第k个元素等于1的行向量,in为n维单位矩阵,表示克罗内克积;
15、36)计算得到位置感知克拉美罗下界crb作为在三维空间的定位性能;
16、37)设计目标为最小化位置感知克拉美罗下界引入辅助变量u,令则设计目标等价转换为最小化tr(u-1);
17、38)利用内点法或直接调用cvx工具包进行求解,求出使tr(u-1)最小的解,即得到使位置感知克拉美罗下界最小的wm和r,进行特征值分解和向量拆分即得到为第k颗低轨卫星设计的对第m个用户通信波束wk,m和为第k颗卫星设计的感知波形rk。
18、进一步的,所述步骤36)中,位置感知克拉美罗下界的计算方法具体如下:
19、361)计算出对于角度向量的费舍尔信息矩阵其中θ=[θ1;…θk…;θk],θk和分别为第k颗低轨卫星到目标的方位角和俯仰角,
20、
21、
22、其中[fωω]i,j表示矩阵fωω中第i行第j列的元素,[fωα]i表示列向量fωα中第i个元素,ωi表示向量ω的第i个元素,ωj表示向量ω的第j个元素,⊙表示哈德玛积,re(·)表示复数取实部,α为目标的反射系数,为低轨卫星接收到高斯白噪声的方差,βu=[β1,u;…βk,u…;βk,u],βk,u为第k颗卫星的发射信号经目标反射到第u颗卫星的增益,和分别为第k颗低轨卫星的发射导向矢量和接收导向矢量,1n×n表示元素全为1的n×n维矩阵;
23、362)计算出位置感知克拉美罗下界为crb=tr((jτfωj)-1),其中为从角度向量ω到坐标向量p雅可比矩阵,p为目标坐标向量。
24、作为优选,所述步骤5)中,一种基于粒子群算法的直接定位方法具体如下:
25、51)获取第k颗低轨卫星对第m个用户的通信波束wk,m和第k颗低轨卫星的感知波形rk;
26、52)初始化粒子数量为i,粒子序号为i,粒子维度序号为d=[1,2,3],迭代索引t=1,随机初始化粒子个体位置和速度;
27、53)计算得到适应值函数为其中v=[v1;…vk…;vk],vk=[wk,1,…wk,m…,wk,m],s=[s1;…sm…;sm],a(p)为导向矢量矩阵关于目标位置p的函数,y为中心卫星根据融合得到的反射信号,||·||表示矢量的二范数;根据适应值函数计算出所有粒子适应值;
28、54)更新粒子个体历史最优适应值和位置其中为粒子i在第t次迭代中第d维的历史最优位置;
29、55)更新粒子群体历史最优适应值和位置其中为群体在第t次迭代中第d维的历史最优位置;
30、56)更新粒子速度其中为粒子i在第t次迭代中第d维的位置,为粒子i在第t次迭代中第d维的速度,为惯性权重,rand1和rand2为0到1内随机数;c1为个体学习因子,c2为群体学习因子;
31、57)更新粒子位置
32、58)若达到最大迭代次数或适应值收敛,则得到为定位目标位置,否则令t=t+1,重新执行步骤54)~58)。
33、本发明具有的有益效果是:本发明提出的基于多星协作的信息通信和位置感知一体化方法,解决传统信息通信和位置感知系统相互独立导致系统性能和效率低,能量消耗和成本大的缺点。本发明提出的信息通信和位置感知一体化波束和波形设计方法和基于粒子群算法的直接定位方法具有复杂度低,定位精度高等优点。
- 还没有人留言评论。精彩留言会获得点赞!