一种基于WiFi信号的非视距移动目标感知系统及方法与流程
本发明涉及非视距移动目标感知领域,具体是一种基于wifi信号的非视距移动目标感知系统及方法。
背景技术:
1、随着科技的不断进步,传统的视觉监测系统在某些场景下面临一定的局限性。例如,在建筑林立的城市环境中,目标可能被建筑物遮挡而无法直接观测到,或者在复杂地形、浓密植被等区域内目标容易隐藏。这些情况下,传统的视觉监测系统无法准确检测和追踪目标,因而需要一种能够克服视觉受限的技术。
2、基于无线信号的非视距移动目标检测技术,是一种可以通过无线信号的传播、反射和多径传播等现象,实现对被遮挡目标感知检测的技术。此技术在多个领域都具有重要的应用价值。
3、但目前传统的实现方式大都依赖预布的wifi设备,需要目标场所提供配合支持,场景应用局限性较大,而且传统基于wifi的移动目标感知需要提前预布多套wifi设备、目标场所需要配合提供支持才能实现,传统的检测系统无法提供支撑,而专用的非合作式探测设备如超宽带,热成像等,不仅体积庞大且造价高昂。
4、因此,本领域技术人员提供了一种基于wifi信号的非视距移动目标感知系统,以解决上述背景技术中提出的问题。
技术实现思路
1、本发明的目的在于提供一种基于wifi信号的非视距移动目标感知系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
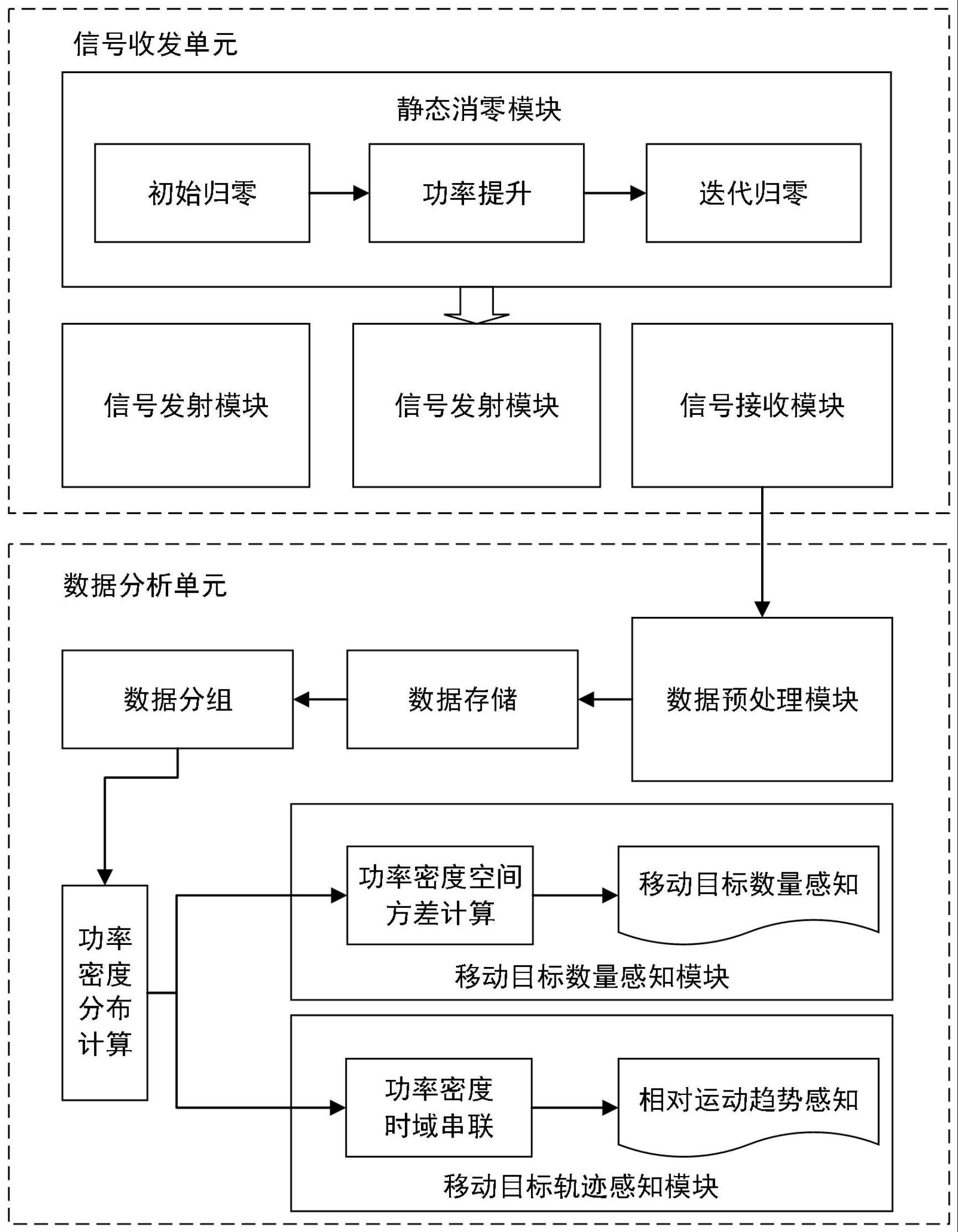
3、一种基于wifi信号的非视距移动目标感知系统,包括信号收发单元和数据分析单元,信号收发单元由信号发射模块、信号接收模块和静态消零模块组成;
4、所述信号发射模块用于构造标准ofdm调制的wifi信号,通过驱动射频子板配置发送天线功率,工作频率,工作带宽等通信参数,经功率放大器放大后通过发射天线发射信号,通过外挂时钟实现与接收射频子板的同步;
5、所述信号接收模块用于标准ofdm调制wifi信号的解调,通过驱动射频子板配置接收天线功率,工作频率,工作带宽等通信参数,通过接收天线接收信号,通过外挂时钟实现与发送射频子板的同步;
6、所述静态消零模块实现内容包括初始归零、功率提升和迭代归零,初始归零阶段先驱动天线1发送标准ofdm调制的wifi信号,然后驱动天线2发送相同wifi信号,根据接收天线接收到的天线分别估计信道1和信道2,计算二者的比率后,天线2发送新的构造信号,实现接收端接收的叠加信号的幅值趋近于零;功率提升阶段在初始归零的基础上,调用信号发射模块提升发射天线功率;迭代归零阶段,根据发送端接收到的叠加信号的信道估计值反复迭代,直到两个信道值收敛后,达成发送信号的静态消零状态。
7、作为本发明进一步的方案:所述数据分析单元由数据预处理模块、移动目标数量感知模块和移动目标轨迹感知模块组成。
8、作为本发明进一步的方案:所述数据预处理模块用于处理并存储信号接收模块接受到的信号数据,通过计算接收模块接收到的信号与发送信号在频域上的比值获取当前时空的信道估计值,并以时间戳作为键值存储与非关系型数据库供进一步分析处理。
9、作为本发明进一步的方案:所述移动目标数量感知模块用于当前时间移动目标数量的检测,基于移动目标越多反射信号功率密度分布空间方差越大的事实,计算数据功率密度分布的空间方差,基于空间方差和移动目标数量的先验值,感知移动目标数量。
10、作为本发明进一步的方案:所述动目标轨迹感知模块用于移动目标的运动轨迹趋势感知,基于雷达逆合孔径原理,获取采集数据的功率到达角度密度分布,根据波峰位置换算信号法角,在时域上对以上分析结果进行串联后,形成移动目标相对轨迹趋势图。
11、一种基于wifi信号的非视距移动目标感知方法,该方法包括如下步骤:
12、1)信号发射模块和信号接收模块根据配置的通信参数驱动天线执行通信;
13、2)执行静态消零消除墙体等固定物体的闪光效应,执行静态物体干扰归零的过程可分为三个阶段,分别是初始归零、功率提升和迭代归零;
14、2.1初始归零
15、系统有两根发射天线和一根接收天线,首先,在第一个发射天线上发射标准的正弦波信号x,该信号在接收天线处接收为y=h1x,其中h1是第一个发射天线和接收天线之间的信道,接收器使用该信号来计算信道h^1的估计值,其次,这次仅在其第二个天线上发送相同的正弦波信号x,并使用接收到的信号来估计第二个发射天线和接收天线之间的信道h^2,系统使用这些信道估计值来计算比率p=-h^1/h^2,最后,两个发射天线同时发射,其中第一个天线发射x,第二个发射px,因此,接收端的感知信道为:
16、hrse=h1+h2(-h^1/h^2)≈0
17、在理想情况下,估计h^1和h^2是完美的,接收到的信号hres将等于0,到此阶段结束时,系统已经消除了从所有静态物体反射的信号以及从发射天线到接收天线的直接信号,如果没有对象移动,则通道将继续为空,然而,由于射频反射在介质上线性组合,如果某个物体移动,它的反射将开始出现在通道值中;
18、2.2功率提升
19、然而,仅仅将静态反射归零是不够的,墙后移动目标产生的信号太弱,闪光效果比墙后移动物体的反射功率高30~40db,即使清除了闪光效果,由于移动目标反射信号太弱,它会淹没在接收器的硬件噪声中,因此,我们需要提高发射信号的功率,请注意,由于通道已经归零,即hres≈0,因此功率的增加不会使接收器的模数转换器(adc)饱和,然而,它增加了穿过墙壁的总功率;
20、2.3迭代归零
21、在提高发射功率后,低于adc量化水平的残余反射变得可测量,如果不移除,来自静态对象的此类反射会在跟踪过程中造成严重的混乱,为了解决这个问题,系统执行了一个称为迭代归零的过程,我们需要在提高功率后再次将信号归零,以消除静态物体的残余反射;
22、利用信道估计中的误差远小于信道估计本身的事实,并使用此观察来改进其估计,具体来说,通过假设h2的估计是准确的(即h^2=h2),公式1只剩下一个未知变量h1,通过求解这个未知变量,我们获得了对h1的更好估计,特别是新的估计h^1′是:
23、h^1'=h1=hres+h^1
24、同理,通过假设h1的估计是准确的(即h^1=h1),我们可以求解公式1,对h2进行更精确的估计:
25、h^2′=h2=(1-hres/h^1)h^2
26、因此,在这两个步骤之间迭代以获得对h1和h2的更精确估计,直到两个估计h^1和h^2收敛,这种迭代归零算法以指数速度快速收敛;
27、2)当迭代归零结束后,采集并计算接收模块接收到的信号与发送信号在频域上的比值获取当前时空的信道估计值,令x[n]为离散时间点n发送的信号样本,令y[n]为离散时间点n接收到的信号样本,即h[n]=y[n]/x[n],将h[n]以时间戳作为键值存储于存储介质中;
28、3)将数据代入逆合成孔径雷达(isar)的模型,即利用目标的移动来模拟天线阵列,基于信道的互易性捕获从目标反射的信号,并处理此信息以识别目标相对于阵列的方向,按照固定单位时间窗口采集到的数据进行分组,即为了模拟大小为w的天线阵列,将w个连续通道测量值h[n]...h[n+w]作为一组数据;
29、4)将采集到的连续时间样本对应于移动目标的连续空间位置,通过将连续时间样本视为空间样本,通过应用标准天线阵列方程计算数据在固定单位时间窗口沿每个角度θ的功率密度分布a[θ,n],
30、
31、其中λ是波长,δ是阵列中连续天线之间的空间间隔;
32、5)计算每组数据的功率密度分布a[θ,n]的空间方差,根据空间方差阈值和移动目标数量的映射关系,得出移动目标数量,具体的首先计算空间质心的时间函数:
33、
34、然后计算空间方差:
35、
36、基于空间方差阈值和移动目标数量的映射关系感知移动目标数量(映射关系通过前期训练学习标注);
37、在a[θ,n]中产生最大值的θ值将对应于沿该方向的方向物体正在移动,将功率密度分布的以热力图的形式绘制并在时域上进行串联,就形成移动目标相对轨迹趋势图,最终实现非视距的移动目标感知。
38、与现有技术相比,本发明的有益效果是:
39、本发明相较于传统基于wifi的移动目标感知设备而言,在无需预布设备的情况下,单机实现感知功能,通过系统自身收发wifi信号,利用静态清零算法实现墙体等固定物体的闪光效应消除,再通过采集分析接收信号基于静态清零后的信道状态变化,将数据代入逆合成孔径雷达模型计算数据的功率密度分布,利用空间方差和多信号分类算法对数据进行分析,检测移动目标数量和移动目标运动趋势,最终实现非合作式的非视距移动目标感知,而且本技术的实现主要依赖于多种无线信号传感器,包括雷达、wifi、蓝牙、毫米波雷达等,基于wifi信号的实现方式,凭借广泛可用的基础设施,具有低成本和高效性等优势。
- 还没有人留言评论。精彩留言会获得点赞!