基于CAT1及北斗定位的电子车牌及其系统的制作方法
本发明涉及电子定位技术,具体涉及基于cat1及北斗定位的电子车牌及其系统。
背景技术:
1、4g cat1是4g通信lte网络下用户终端类别的一个标准。目前有使用蓝牙技术的智能车辆,以及nbiot或2g/3g无线模块,但是由于网络覆盖在城市中,信号并不稳定。并且使用蓝牙技术还需要借助移动终端来实现授权,移动终端在使用者的手里,不受监控,软件有可能被破译,安全问题受到严重威胁。
2、北斗gps是一种卫星导航系统,可以为车主提供连续的导航信息。但是单一的gps接收机工作在隧道、森林等有遮挡或有严重电磁干扰的情况下时,就接收不到卫星发送过来的导航信号,无法进行导航定位。并且在出现故障时无法进行自测。
3、申请号为cn201821931848.6的专利,公开了一种带低功耗通讯模块的gps车辆定位卡,包括外壳及电路组件,所述电路组件包括电源模块、gps模块、控制芯片、加速度传感器、led灯、远距离通讯模块及近距离通讯模块,所述电源模块包括稳压模块及充电模块,稳压模块输出供电电源,所述控制芯片连接充电模块、gps模块、加速度传感器、led灯、远距离通讯模块及近距离通讯模块。但是,该gps车辆定位卡不能更准确的获取车辆位置,并且不能将车主信息以及车辆信息进行加密。
4、因此,需要基于cat1及北斗定位的电子车牌及其系统,用以解决上述存在的问题。
技术实现思路
1、
2、本发明提供基于cat1及北斗定位的电子车牌及其系统,以解决现有技术中存在的上述问题。
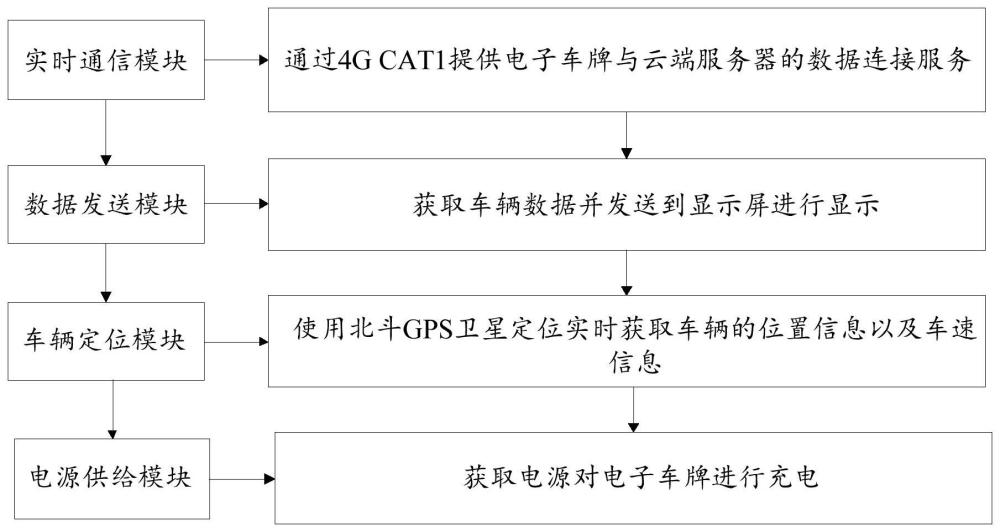
3、基于cat1及北斗定位的电子车牌系统,包括:
4、实时通信模块,用于通过4g cat1提供电子车牌与云端服务器的数据连接服务;
5、数据发送模块,用于获取车辆数据并发送到显示屏进行显示,对电子车牌进行初始化,在车辆行驶过程中记录车辆的行驶状态,并显示到电子车牌的显示屏中;
6、车辆定位模块,用于使用北斗gps卫星定位实时获取车辆的位置信息以及车速信息,获取车辆的经纬度信息并通过坐标旋转进行车辆位置精确计算;
7、电源供给模块,用于获取电源对电子车牌进行充电,并实现电子车牌的低功耗运行。
8、优选的,所述实时通信模块,包括:
9、电子配置单元,用于通过电子车牌系统的管理员对电子车牌的连接服务进行配置;配置内容包括电子车牌与云端服务器进行连接的ip地址、端口以及通讯密钥,同时设置电子车牌系统的升级功能;
10、服务授权单元,用于获取车辆位置及车主信息的授权,管理员通过云端服务器的管理功能授权电子车牌的定位功能以及安装任务,电子车牌的操作员持有电子车牌的授权定位功能以及授权车主身份的注册功能;
11、事件上传单元,用于将电子车牌的定位功能和安装任务自动上传到云端服务器,管理员通过查询事件对电子车牌系统的功能进行管理,并将查询事件和授权过程建立在4gcat1无线通讯技术上。
12、优选的,所述数据发送模块,包括:
13、通信初始化单元,用于对电子车牌的注册信息以及运行状态进行初始化,注册信息包括对车主信息以及电子车牌的型号进行注册登记,运行状态包括对电子车牌发出定位指令、通信指令以及读取车牌状态指令;
14、电子显示单元,用于使用oled屏幕对电子车牌中的信息进行显示,显示内容包括电子车牌的电量、当前时间、任务查询、任务执行、充电以及通信状态;
15、指令发布单元,用于车主发出电子车牌中的指令,使用蓝牙模组建立电子车牌与云端服务器的无线通信,用户通过移动终端中的nfc功能与电子车牌建立连接,并通过移动终端获取电子车牌中的信息。
16、优选的,所述指令发布单元,包括:
17、物联网管理子单元,用于对电子车牌的任务功能进行管理,任务功能包括对车主的权限管理,任务的下发以及事件的上传;
18、信息读取子单元,用于使用nfc对车主信息以及电子车牌信息进行读取;
19、系统控制子单元,用于实现电子车牌的低功耗运行,包括电子车牌的开关机以及电源的充电管理;在车辆熄火过程中,电子车牌处于休眠状态,并同时由云端服务器对电子车牌的电池电压进行检测,以及对充电芯片进行管理。
20、优选的,所述车辆定位模块,包括:
21、卫星监控单元,用于使用gps对地面车辆进行监控,监控体系包括主控站、监控站和注入站;监控站用于对采集到空间卫星的状态信息进行监控,并将状态信息发送给主控站;主控站将状态信息生成卫星信号发送给注入站,注入站解算出卫星信号中的导航参数,最后发送给空间卫星的gps接收机;
22、坐标获取单元,用于计算得到gps接收机的坐标位置,电子车牌获取空间卫星的卫星信号以及导航参数作为卫星信息,通过构建方程组的方式计算gps接收机的坐标位置;
23、坐标转换单元,用于确定车辆的具体位置,获取gps接收机中包含经纬度数据的坐标位置以确定电子车牌的位置,并通过坐标变换的方式得到精确的车辆位置。
24、优选的,所述坐标转换单元,包括:
25、坐标轴建立子单元,用于在车辆起点处建立坐标系,以车辆中心为坐标原点,车辆右侧为x轴,车辆行驶方向为y轴,车辆行驶方向与x轴的车辆偏角为θ;定义车辆在行驶过程中的状态向量包括x轴分量、y轴分量、车辆速度和车辆偏角θ;
26、数据处理子单元,用于获取状态向量进行预处理,计算车辆在当前时刻的第一状态向量,并预测车辆在行驶时下一时刻的第二状态向量,计算第一状态向量与第二状态向量的状态向量协方差并进行加权运算,输出状态向量协方差的协方差矩阵,将协方差矩阵中的位置信息进行输出。
27、优选的,所述数据处理子单元之后,还包括:
28、数据转换子单元,用于对位置信息中的经纬度数据进行变换,将经纬度数据输入至mcu主控芯片中,对经纬度数据进行高斯投影坐标变换,并将经度和纬度转化为高斯平面直角坐标系后进行计算;高斯平面直角坐标系以中央子午线与赤道的交点作为坐标原点,中央子午线的投影为纵坐标轴,赤道的投影为横坐标轴,
29、数据精确子单元,用于精确经纬度数据,车辆在变换位置后,通过卡尔曼滤波算法对经纬度数据进行增益,得到高斯噪声的协方差矩阵,代表gsp定位的测量误差,通过计算车辆变换位置更新部分的状态向量协方差矩阵,最终得到精确的经纬度位置。
30、优选的,所述电子配置单元,包括:
31、会话匿名子单元,用于建立电子车牌与云端服务器之间的匿名通信,构建第一控制逻辑,通过在预设时间内对电子车牌与云端服务器之间的会话进行匿名化处理,会话内容包括获取车辆定位请求以及车辆速度请求;
32、加密传输子单元,用于车辆及车主信息进行加密传输,构建第二控制逻辑,通过匿名化处理生成唯一的会话标识,会话标识中包含密钥对,密钥对内存储有车辆参数;由电子车牌对密钥对进行加密生成加密密钥,云端服务器通过验证加密密钥的身份并进行解密生成解密密钥获取密钥对中的信息;
33、条件判断子单元,用于由第一控制逻辑判断第二控制逻辑是否具有执行条件。
34、优选的,基于cat1及北斗定位的电子车牌系统,还包括:
35、误差分析模块,用于检测电子车牌进行定位的测量误差,测量误差包括gps定位误差、传播路径误差以及接收机设备误差;
36、故障检测模块,用于自动检查电子车牌中出现的故障问题,获取测量误差并构建误差特性模型,使用权重估计策略设置gps定位参数的权重,并通过最小二乘法进行解算,将解算结果与误差特性模型进行比较,对电子车牌的故障进行检测;
37、问题自修模块,用于对检测出电子车牌的故障自动进行检修,预设误警概率对故障进行全局检验,并使用权重修正的方式对识别出的误差进行检修。
38、优选的,基于4g cat1及北斗gps定位的电子车牌,包括:
39、通过4g cat1提供电子车牌与云端服务器的数据连接服务;
40、获取车辆数据并发送到显示屏进行显示,对电子车牌进行初始化,在车辆行驶过程中记录车辆的行驶状态,并显示到电子车牌的显示屏中;
41、使用北斗gps卫星定位实时获取车辆的位置信息以及车速信息,获取车辆的经纬度信息并通过坐标旋转进行车辆位置精确计算;
42、获取电源对电子车牌进行充电,并实现电子车牌的低功耗运行。
43、与现有技术相比,本发明具有以下优点:本发明提供基于cat1及北斗定位的电子车牌及其系统,其特点在于成本低、可靠性好、可以达到现有交通系统对车辆信息、定位信息以及速度监管的要求。
44、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
45、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!