一种基于少量定位基站的推煤机精度分化定位方法与流程
本发明涉及推煤机定位,具体涉及一种基于少量定位基站的推煤机精度分化定位方法。
背景技术:
1、随着无人驾驶工程机械的广泛应用,如无人驾驶推煤机进行气膜封闭储煤场的作业,无人驾驶则需要实时获取自身的定位结果,以保证在气膜煤场的广阔空间范围内,如果推煤机发生故障,能快速准确的找到推煤机所在位置,同时也能提高无人驾驶推煤机在工作过程中的安全和工作稳定性。
2、现有大多通过在气膜封闭储煤场内设置超宽带设备实时定位监测系统,可以全方位的监测封闭煤场内所有作业机械的实时位置信息,配合视频监控系统可以了解推煤机的作业情况。
3、而现有的定位方式的具体实现流程为:在气膜煤场的长度方向设置密集的多组定位基站,且每组定位基站沿着气膜煤场的弧面按照很小的夹角依次设置,这样导致对推煤机定位时,需要大量的定位基站,造成成本的增大,同时在每次定位推煤机时,需要海量的数据计算,并直接定位到推煤机的具体坐标值,计算操作负担大,因此可能会造成推煤机定位迟缓的问题,还是会导致推煤机定位不精确。
技术实现思路
1、本发明的目的在于提供一种基于少量定位基站的推煤机精度分化定位方法,以解决现有技术中对推煤机定位时,需要大量的定位基站,造成成本的增大,直接定位到推煤机的具体坐标值,计算操作负担大,还是会导致推煤机定位不精确的技术问题。
2、为解决上述技术问题,本发明具体提供下述技术方案:
3、一种基于少量定位基站的推煤机精度分化定位方法,包括以下步骤:
4、步骤100、在气膜煤场的顶部沿着煤场长度方向按照固定间距依次设置多组定位基站,且每组所述定位基站在所述气膜煤场的顶部沿着弧形曲面按照固定夹角依次设置,在推煤机上设置定位标签,所述定位标签与所述定位基站之间能够实现网络通讯;
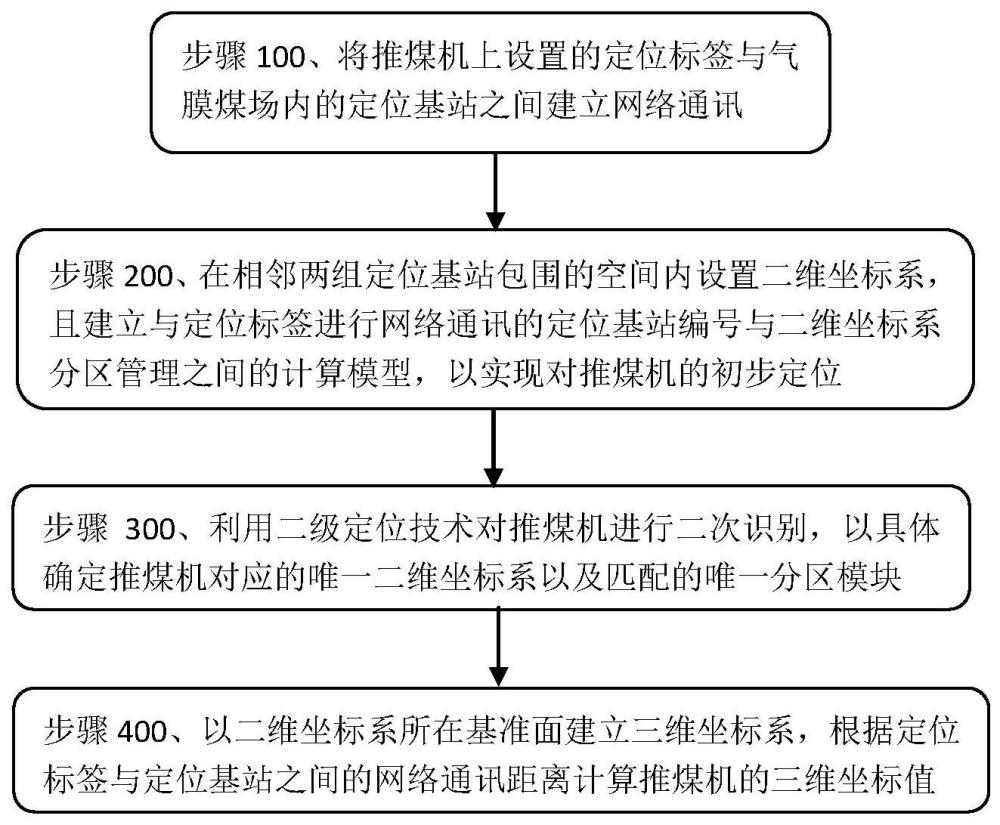
5、步骤200、在相邻两组所述定位基站包围的空间内设置二维坐标系,且建立与所述定位标签进行网络通讯的定位基站编号与所述二维坐标系分区管理之间的计算模型,基于所述计算模型确定所述推煤机所处的二维坐标系范围,以实现对所述推煤机的初步定位;
6、步骤300、确定所述推煤机所处的所述二维坐标系以及在对应的所述二维坐标系的分区模块,利用二级定位技术对所述推煤机进行二次识别,以具体确定所述推煤机对应的唯一二维坐标系以及匹配的唯一分区模块,对所述推煤机进行二次定位;
7、步骤400、以所述二维坐标系所在基准面建立三维坐标系,确定每个所述定位基站的三维坐标值,根据所述定位标签与所述定位基站之间的网络通讯距离计算所述推煤机的三维坐标值,对所述推煤机进行三次精准定位。
8、作为本发明的一种优选方案,在所述步骤200中,所述二维坐标系以所述气膜煤场的地面为基准面,以所述气膜煤场长度方向的中心轴线为y轴,以所述气膜煤场的宽度方向为x轴,且所述二维坐标系的原点位置与所述气膜煤场的两组所述定位基站之间的中点位置处于同一垂直线上。
9、作为本发明的一种优选方案,在所述步骤200中,对所述推煤机进行初步定位的实现步骤为:
10、设定所述推煤机上的定位标签与所述气膜煤场顶部的定位基站之间的最大网络通讯距离,以使得所述推煤机在移动时分别与不同的所述定位基站建立网络通讯;
11、对每个所述定位基站按照组序和所处位置进行分类编号,根据与所述定位标签建立网络通讯的所述定位基站编号,确定所述推煤机在所述二维坐标系的位置偏向;
12、将所述定位标签在所述气膜煤场内模拟移动,根据所述推煤机在所述二维坐标系范围内移动时与该区域范围内的所述定位基站建立网络通讯连接的关系,建立与所述定位标签进行网络通讯的定位基站编号与所述二维坐标系分区管理之间的计算模型;
13、将所述二维坐标系的区域范围根据与所述定位标签建立网络通讯的计算模型进行分区管理,将所述二维坐标系划分为多个分区模块;
14、确定与当前的所述推煤机建立网络通讯的所述定位基站编号,并根据所述一级映射关系确定所述推煤机所处的分区模块。
15、作为本发明的一种优选方案,在所述步骤200中,对所述二维坐标系的区域范围进行分区的计算模型为:
16、v=f[f(定位基站)];
17、其中,v为所述推煤机所在二维坐标系以及所在分区模块,f为所述定位基站形成的参数组,f为所述定位基站编号形成的参数组。
18、作为本发明的一种优选方案,所述二维坐标系的分区模块包括:
19、前单向全识别区,所述推煤机在此区域内能够与所述二维坐标系内y轴正方向的所有定位基站建立网络通讯;
20、后单向全识别区,所述推煤机在此区域内能够与所述二维坐标系内y轴负方向的所有定位基站建立网络通讯;
21、前左识别区,处于所述二维坐标系的第二象限,所述推煤机在此区域内仅能与所述二维坐标系内y轴正方向的若干个所述定位基站建立网络通讯;
22、前右识别区,处于所述二维坐标系的第一象限,所述推煤机在此区域内仅能与所述二维坐标系内y轴正方向的若干个所述定位基站建立网络通讯;
23、后左识别区,处于所述二维坐标系的第三象限,所述推煤机在此区域内仅能与所述二维坐标系内y轴负方向的若干个所述定位基站建立网络通讯;
24、后右识别区,处于所述二维坐标系的第四象限,所述推煤机在此区域内仅能与所述二维坐标系内y轴负方向的若干个所述定位基站建立网络通讯;
25、双向识别区,所述推煤机在此区域内能够与所述二维坐标系内y轴负方向以及y轴正方向的若干个所述定位基站建立网络通讯,且所述双向识别区分布在所述二维坐标系的y轴两侧;
26、断联区,所述推煤机在此区域内无法与所述二维坐标系内y轴负方向以及y轴正方向的任一个所述定位基站建立网络通讯。
27、作为本发明的一种优选方案,在所述步骤200中,相邻的两个所述二维坐标系的不同分区模块存在一组由相同的定位基站编号形成的参数组,以使得相邻的两个所述二维坐标系的不同分区模块形成交叉区域;
28、根据所述计算模型输出结果为两个相邻所述二维坐标系的分区模块,实现对所述推煤机的初步定位。
29、作为本发明的一种优选方案,在步骤300中,相邻的两个所述二维坐标系的不同分区模块存在一组由相同的定位基站编号形成的参数组的具体情况为:
30、两个相邻所述二维坐标系的所述前左识别区和所述后左识别区对应的所述定位基站编号形成的参数组相同,两个相邻所述二维坐标系的所述前左识别区和所述后左识别区形成交叉区域;
31、两个相邻所述二维坐标系的所述前右识别区和所述后右识别区对应的所述定位基站编号形成的参数组相同,两个相邻所述二维坐标系的所述前右识别区和所述后右识别区形成交叉区域;
32、两个相邻所述二维坐标系的所述前单向全识别区和所述后单向全识别区对应的所述定位基站编号形成的参数组相同,两个相邻所述二维坐标系的所述前单向全识别区和所述后单向全识别区形成交叉区域。
33、作为本发明的一种优选方案,在所述步骤300中,所述二级定位技术为图像自动跟踪识别技术,在所述气膜煤场的顶上设置多条行走轨道,每条所述行走轨道上安装有能够沿着所述行走轨道往复移动的图像采集装置;
34、基于所述计算模型确定所述推煤机所处二维坐标系的分区模块,根据所述分区模块的位置偏向选择所述图像采集装置;
35、若所述计算模型输出结果为形成交叉区域的两个所述分区模块,则将所述图像采集装置移动至所述交叉区域所处的长度范围内,通过图像识别技术来确定所述推煤机所处的唯一所述二维坐标系,以及对应的所述二维坐标系的唯一分区模块。
36、作为本发明的一种优选方案,若所述计算模型输出的所述推煤机处于所述二维坐标系的断联区,则根据所述断联区所在位置选择所述图像采集装置,根据所述图像采集装置在所述推煤机所在场区的移动位置以及对应的图像采集结果,精确确定所述推煤机的位置。
37、作为本发明的一种优选方案,在所述步骤400中,以所述二维坐标系所在基准面建立三维坐标系,确定每个所述定位基站的三维坐标值,根据所述定位标签与所述定位基站之间的网络通讯距离计算所述推煤机的坐标值,对所述推煤机进行三次精准定位
38、以所述二维坐标系的原点位置建立z轴,确定每个所述定位基站在所述三维坐标系的三维坐标值,计算与所述定位标签建立网络通讯连接的所述定位基站与所述定位标签之间的距离值,来确定所述定位标签在当前所述三维坐标系内的三维坐标值,实现对所述推煤机进行三次精准定位。
39、本发明与现有技术相比较具有如下有益效果:
40、本发明针对煤场空间大而布置的定位基站数量少的情况下,来确定推煤机所在位置,设置成本低,且数据计算量少,另外用户可根据选择自定义确定定位的精度,定位精度由低到高,能够先粗略确定推煤机在气膜煤场的区间范围,以及在该区间范围内的方位,因此响应速度快,达到提前预警的操作,最后经过少量的数据计算具体确定推煤机的具体坐标值,即在得到推煤机的粗略位置的前提下,根据工作情况具体选择定位精度。
- 还没有人留言评论。精彩留言会获得点赞!