一种抑制激光频漂系统误差的光纤相位补偿器的制作方法
本发明涉及光纤时频传递技术,尤其涉及基于等臂光纤干涉仪抑制激光频率漂移引起光纤传输延时变化量检测误差的光纤稳相传输设备,具体是一种抑制激光频漂系统误差的光纤相位补偿器,能实现对光纤光缆上传输延时变化量的准确检测和补偿。
背景技术:
1、光纤是高精度时间频率传递的重要载体,传输路径上的环境噪声会导致高精度时间频率信号的质量下降,需对光纤时频传递采取主动控制措施。基于光纤干涉仪条纹计数法的光纤相位补偿器检测光纤传输延时变化量的分辨率为λ/4,由于激光波长极短,其检测分辨率达到1fs量级,理论上可以实现飞秒级的稳相补偿精度。
2、然而,由于光纤干涉仪检测到的相位变化包含了温度和振动引起的光纤传输延时量变化和激光器频率漂移引起的相位变化,激光器频率漂移引起的相位变化就成了光纤传输延时量变化检测的系统误差,该系统误差达到26fs/(km·mhz);目前商用窄线宽激光器的短期频率稳定性约10mhz@100s,由于工作温度变化还会使激光器中心频率产生数百mhz至数十ghz的更大频率漂移,会使光纤相位补偿器的稳相补偿精度严重下降。
3、采用等臂光纤干涉仪检测可以抑制激光器频率漂移产生的相位漂移检测误差,但同时又引入了参考臂温漂产生的相位漂移检测误差,使得传输光缆的延时变化量检测准确度下降。
技术实现思路
1、本发明的目的是针对现有技术的不足,而提供一种抑制激光频漂系统误差的光纤相位补偿器。这种光纤相位补偿器采用共用一个干涉臂的两个等臂光纤干涉仪,能测量出抑制了激光器频率漂移所产生的相位检测误差的光纤光缆上的传输延时变化量,并能修正等臂光纤干涉仪参考臂温漂产生的传输延时变化量误差,能实现对光纤光缆上传输延时变化量的准确检测和补偿。
2、实现本发明目的的技术方案是:
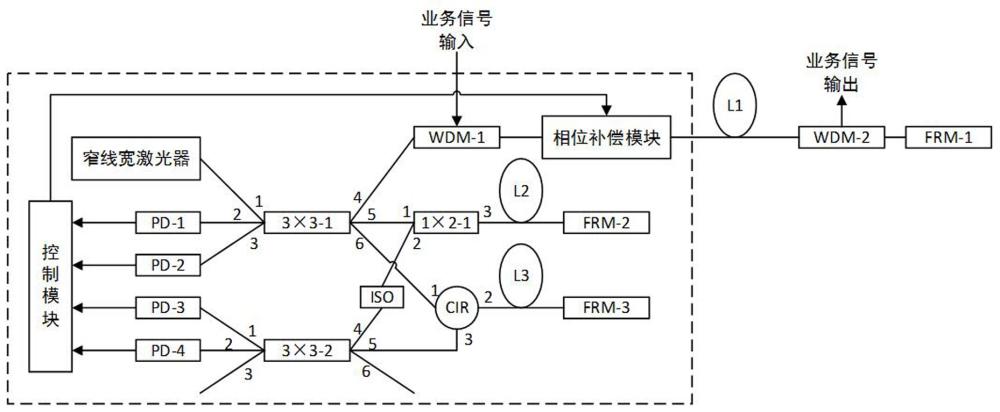
3、一种抑制激光频漂系统误差的光纤相位补偿器,包括窄线宽激光器、第一3×3光纤耦合器、第二3×3光纤耦合器、第一波分复用器、相位补偿模块、第一光纤光缆l1、第二波分复用器、第一法拉第磁旋转反射镜、第一1×2光纤耦合器、第二光纤段l2、第二法拉第磁旋转反射镜、光纤隔离器iso、光纤环形器cir、第三光纤段l3、第三法拉第磁旋转反射镜、第一光电探测器pd-1、第二光电探测器pd-2、第三光电探测器pd-3、第四光电探测器pd-4和控制模块,其中:
4、第一3×3光纤耦合器、第一波分复用器、相位补偿模块、第一光纤光缆l1、第二波分复用器、第一法拉第磁旋转反射镜顺序连接、同时第一3×3光纤耦合器还与第一1×2光纤耦合器、第二光纤段l2、第二法拉第磁旋转反射镜顺序连接共同构成第一光纤干涉仪,窄线宽激光器输出激光接入第一3×3光纤耦合器的1端口,分成三束分别由4端口、5端口、6端口输出;第一光纤干涉仪的测量臂光路为:从第一3×3光纤耦合器4端口输出的激光接入第一波分复用器的透射端,由第一波分复用器公共端输出激光经相位补偿模块至第一光纤光缆l1接入第二波分复用器的公共端,由第二波分复用器的透射端输出激光接入第一法拉第磁旋转反射镜并将激光原路反射回第一3×3光纤耦合器的4端口;第一光纤干涉仪的参考臂光路为:第一3×3光纤耦合器的5端口输出、接入第一1×2光纤耦合器1端口并经3端口输出经第二光纤段l2到达第二法拉第磁旋转反射镜并原路反射回第一3×3光纤耦合器的5端口,第一光纤干涉仪为迈克尔逊光纤干涉仪,第一光纤干涉仪的测量臂与参考臂的激光在第一3×3光纤耦合器内相干,输出干涉信号分别由第一3×3光纤耦合器的2端口、3端口进入第一光电探测器pd-1和第二光电探测器pd-2,第一光电探测器pd-1和第二光电探测器pd-2接入控制模块,控制模块解调出第一光纤干涉仪的相位变化量;
5、构成第二光纤干涉仪的第一种连接方式为:第一3×3光纤耦合器、第一1×2光纤耦合器、第二光纤段l2、第二法拉第磁旋转反射镜顺序连接、同时第一3×3光纤耦合器、光纤环形器cir、第三光纤段l3、第三法拉第磁旋转反射镜顺序连接,并且第一1×2光纤耦合器、光纤隔离器iso与第二3×3光纤耦合器连接,光纤环形器cir与第二3×3光纤耦合器连接,共同构成第二光纤干涉仪;第二光纤干涉仪的测量臂光路为:第一3×3光纤耦合器的5端口输出、接入第一1×2光纤耦合器1端口并经3端口输出经第二光纤段l2到达第二法拉第磁旋转反射镜并反射回第一1×2光纤耦合器、由第一1×2光纤耦合器的2端口输出经光纤隔离器iso接入第二3×3光纤耦合器的4端口;第二光纤干涉仪的参考臂光路为:第一3×3光纤耦合器的6端口输出、接入光纤环形器cir的1端口并经2端口输出经第三光纤段l3到达第三法拉第磁旋转反射镜并反射回光纤环形器cir的2端口、由光纤环形器cir的3端口接入第二3×3光纤耦合器的5端口,第二光纤干涉仪为马赫-曾德尔光纤干涉仪,第二光纤干涉仪的测量臂与参考臂的激光在第二3×3光纤耦合器内相干,输出干涉信号分别由第二3×3光纤耦合器的1端口、2端口进入第三光电探测器pd-3和第四光电探测器pd-4,第三光电探测器pd-3和第四光电探测器pd-4接入控制模块,控制模块解调出第二光纤干涉仪的相位变化量,控制模块根据第一光纤干涉仪的相位变化量和第二光纤干涉仪的相位变化量计算第一光纤干涉仪测量臂上的光纤延时变化量,并控制相位补偿模块对第一光纤干涉仪测量臂上的光纤延时变化量进行反馈补偿;
6、构成第二光纤干涉仪的第二种连接方式为:窄线宽激光器输出激光接入第二1×2光纤耦合器的1端口并分成两路输出:一路由第二1×2光纤耦合器的2端口接入第一3×3光纤耦合器的1端口、另一路由第二1×2光纤耦合器的3端口接入第二3×3光纤耦合器的1端口,第二光纤干涉仪的测量臂光路为:从第二1×2光纤耦合器的2端口输出,接入第一3×3光纤耦合器的1端口,由第一3×3光纤耦合器的5端口输出、接入第一1×2光纤耦合器1端口并经3端口输出经第二光纤段l2到达第二法拉第磁旋转反射镜并反射回第一1×2光纤耦合器、由第一1×2光纤耦合器的2端口输出经光纤隔离器iso接入第二3×3光纤耦合器的4端口;第二光纤干涉仪的参考臂光路为:从第二1×2光纤耦合器的3端口输出,接入第二3×3光纤耦合器的1端口,由第二3×3光纤耦合器的5端口输出、经第三光纤段l3到达第三法拉第磁旋转反射镜并反射回第二3×3光纤耦合器的5端口,此时第二光纤干涉仪为马赫-曾德尔光纤干涉仪,第二光纤干涉仪的测量臂与参考臂的激光在第二3×3光纤耦合器内相干,输出干涉信号分别由第二3×3光纤耦合器的2端口、3端口进入第三光电探测器pd-3和第四光电探测器pd-4,第三光电探测器pd-3和第四光电探测器pd-4接入控制模块,解调出第二光纤干涉仪的相位变化量;
7、业务信号传输路径则为:由业务信号调制输入端经第一波分复用器反射端输入、第一波分复用器公共端输出,经相位补偿模块、第一光纤光缆l1,由第二波分复用器的公共端输入、第二波分复用器反射端输出至业务信号光电接收端。
8、所述业务信号传输的光纤长度与第一光纤干涉仪测量臂的光纤长度相等、第一光纤干涉仪测量臂的光纤延时量与第一光纤干涉仪参考臂的光纤延时量相等,业务信号传输的光纤长度与第一光纤干涉仪测量臂的光纤长度相等,即除了由第一波分复用器公共端输出端尾纤、相位补偿模块、第一光纤光缆l1、第二波分复用器公共端尾纤组成的公共部分之外,业务信号输出尾纤、第一波分复用器反射端尾纤的光纤长度之和与第一波分复用器透射端尾纤、第一3×3光纤耦合器4端口尾纤的光纤长度之和相等,第一光纤干涉仪是等臂光纤干涉仪从而保证了第一光纤干涉仪检测到的相位变化量不包含激光器频率漂移引起的相位变化量,第二波分复用器透射端尾纤、第一法拉第反射镜的尾纤的光纤长度之和与第二波分复用器反射端尾纤、业务信号光电接收端尾纤的光纤长度之和相等,第一光纤干涉仪测量臂的光纤延时量为:从第一3×3光纤耦合器4端口输出、第一波分复用器透射端输入、第一波分复用器公共端输出、经相位补偿模块、第一光纤光缆l1,由第二波分复用器公共端输入、第二波分复用器透射端输出至第一法拉第磁旋转反射镜之间的二倍光纤延时量;第一光纤干涉仪参考臂的光纤延时量为:从第一3×3光纤耦合器5端口输出端经第一1×2光纤耦合器1端口输入、由第一1×2光纤耦合器3端口输出、经第二光纤段l2至第二法拉第磁旋转反射镜之间的二倍光纤延时量。
9、所述第一光纤干涉仪参考臂的光纤延时量与第二光纤干涉仪测量臂的光纤延时量相等,简化为除了由第一1×2光纤耦合器3端口输出、经第二光纤段l2至第二法拉第磁旋转反射镜的公共部分之外,第一3×3光纤耦合器5端口尾纤与第一1×2光纤耦合器1端口尾纤的光纤长度之和,与第一1×2光纤耦合器2端口尾纤、光纤隔离器iso输入端尾纤、光纤隔离器iso输出端尾纤、第二3×3光纤耦合器4端口尾纤的光纤长度之和相等。
10、所述第二光纤干涉仪测量臂的光纤延时量与第二光纤干涉仪参考臂的光纤延时量相等,简化为第一3×3光纤耦合器5端口尾纤、第一1×2光纤耦合器1端口尾纤、第一1×2光纤耦合器3端口尾纤长度的二倍、第一1×2光纤耦合器2端口尾纤、光纤隔离器iso的输入端尾纤、光纤隔离器iso的输出端尾纤、第二3×3光纤耦合器4端口尾纤光纤长度之和,与第一3×3光纤耦合器6端口尾纤、光纤环行器1端口尾纤、光纤环行器2端口尾纤长度的二倍、光纤环行器3端口尾纤、第二3×3光纤耦合器5端口尾纤光纤长度之和相等,第二法拉第磁旋转反射镜尾纤与第三法拉第磁旋转反射镜尾纤的光纤长度相等,第二光纤段l2的长度为d1、光纤纤芯折射率为n1,第三光纤段l3的长度为d2、光纤纤芯折射率为n2,有d1×n1=d2×n2。
11、所述第二光纤干涉仪采用第二种连接方式时,满足第二1×2光纤耦合器2端口尾纤与第一3×3光纤耦合器1端口尾纤的光纤长度之和、与第二1×2光纤耦合器3端口尾纤与第二3×3光纤耦合器1端口尾纤的光纤长度之和相等,第一3×3光纤耦合器5端口尾纤、第一1×2光纤耦合器1端口尾纤的光纤长度之和与第一1×2光纤耦合器2端口尾纤、光纤隔离器iso的输入端尾纤、光纤隔离器iso的输出端尾纤、第二3×3光纤耦合器4端口尾纤的光纤长度之和相等,第一3×3光纤耦合器5端口尾纤、第一1×2光纤耦合器1端口尾纤、第一1×2光纤耦合器2端口尾纤长度的2倍、第一1×2光纤耦合器2端口尾纤、光纤隔离器iso的输入端尾纤、光纤隔离器iso的输出端尾纤、第二3×3光纤耦合器4端口尾纤的光纤长度之和,与第二3×3光纤耦合器5端口尾纤光纤长度的二倍相等,第二法拉第磁旋转反射镜尾纤的光纤长度与第三法拉第磁旋转反射镜尾纤的光纤长度相等,第二光纤段l2的长度为d1、光纤纤芯折射率为n1,第三光纤段l3的长度为d2、光纤纤芯折射率为n2,有d1×n1=d2×n2。
12、所述除了第二光纤段l2或第三光纤段l3两者之一的其他光器件尾纤的光纤、相位补偿模块的光纤、第一光纤光缆l1的光纤均为折射率相同、温漂延时变化系统相同的单模光纤。
13、所述第一3×3光纤耦合器和第二3×3光纤耦合器的1端口、2端口与3端口处于同一侧且无顺序要求,4端口、5端口、6端口处于同一侧且无顺序要求。
14、所述第二光纤段l2、第三光纤段l3及第一3×3光纤耦合器、第二3×3光纤耦合器、第一1×2光纤耦合器、第二法拉第磁旋转反射镜、光纤隔离器iso、光纤环形器cir、第三法拉第磁旋转反射镜工作在同一温度环境下,且第一3×3光纤耦合器、第二3×3光纤耦合器、第一1×2光纤耦合器、第二法拉第磁旋转反射镜、光纤隔离器iso、光纤环形器cir、第三法拉第磁旋转反射镜的尾纤长度,除了要匹配等长要求外,不超过一米。
15、所述第二光纤段l2与第三光纤段l3有如下关系:
16、第二光纤段l2的光纤长度为d1、折射率为n1,第三光纤段l3的光纤长度为d2,折射率为n2,有d1×n1=d2×n2;
17、第三光纤段l3的光纤延时温漂系数是第二光纤段l2的光纤延时温漂系数的a(tp)倍,a(tp)是关于温度的函数,a(tp)≠1,延时温漂系数为单位长度的光纤经过单位温度的变化产生的延时变化量,单位为ps/(km·℃),如公式(1)所示:
18、
19、所述第一光纤干涉仪单位时间检测到的相位变化量为dn1/dt,第二光纤干涉仪单位时间检测到的相位变化量为dn2/dt,则相位补偿模块需要补偿的实时传输延时变化量dn/dt如公式(2)所示:
20、
21、其中n1、n2、n分别为光纤干涉仪输出的相干信号变化周期数。
22、本技术方案所要解决的是现有光纤相位补偿器由于相干光源频率漂移产生较大光纤传输延时变化量检测误差的问题,采用共用一个干涉臂的两个等臂长光纤干涉仪的光纤相位补偿器,一个光纤干涉仪测量出抑制了激光器频率漂移所产生的相位检测误差的光纤光缆上的传输延时变化量,另一个本地光纤干涉仪测量共用干涉臂温漂引起传输延时变化量,修正光纤光缆上的传输延时变化量检测误差。
23、本技术方案采用共用一个干涉臂的两个等臂光纤干涉仪,测量出抑制了激光器频率漂移所产生的相位检测误差的光纤光缆上的传输延时变化量,并修正了等臂光纤干涉仪参考臂温漂产生的传输延时变化量误差,从而实现对光纤光缆上传输延时变化量的准确检测和补偿。
24、这种光纤相位补偿器采用共用一个干涉臂的两个等臂光纤干涉仪,能测量出抑制了激光器频率漂移所产生的相位检测误差的光纤光缆上的传输延时变化量,并能修正等臂光纤干涉仪参考臂温漂产生的传输延时变化量误差,能实现对光纤光缆上传输延时变化量的准确检测和补偿。
- 还没有人留言评论。精彩留言会获得点赞!