一种基于路面摄像头实时视频画面跟踪的方法及其系统与流程
本发明属于安防领域,具体涉及一种基于路面摄像头实时视频画面跟踪的方法及其系统。
背景技术:
1、在安防领域目前基于制定好的路线车辆(队)行进跟踪的方法一般都是采用多路摄像头视频同时播放结合人工调用的方法,或者采用摄像头设备车辆识别的方式。人工调用的方式存在低效且不够精准的问题,而车辆识别的方式需要借助算力且无法调用车辆(队)前方n公里路况画面的问题,很大程度的限制其应用场景。这就需要有一种能够高效地调用车辆(队)行进画面,并能够根据安防需要调用前方n公里实时路况的方法,为后续的指挥调度提供依据。
2、目前,存在以下几点不足:无法根据gis上制定的行进路线快速地匹配出路线防护区边界内的摄像头设备;无法快速的调用车辆(队)位置周边摄像头实时画面;无法快速的调用车辆(队)前方n公里的摄像头实时画面。
3、有鉴于此,提出一种基于路面摄像头实时视频画面跟踪的方法及其系统是非常具有意义的。
技术实现思路
1、本发明提供一种基于路面摄像头实时视频画面跟踪的方法及其系统,根据gis上制定的车辆(队)行进路线,结合道路缓冲区生成算法生成该路线的防护区并自动匹配出防护区边界内的路面摄像头设备进行关联;在车辆(队)行进过程中自动根据车辆回传的北斗位置信息实时切换到距离车辆(队)最近的已关联过的摄像头实时画面,同时调用用户自定义的车辆(队)前方n公里摄像头实时画面,以此来对车辆(队)进行实时跟踪,并实时掌握车辆(队)前方n公里路面的实时状况,以解决上述存在的技术缺陷问题。
2、第一方面,本发明提出了一种基于路面摄像头实时视频画面跟踪的方法,该方法包括如下步骤:
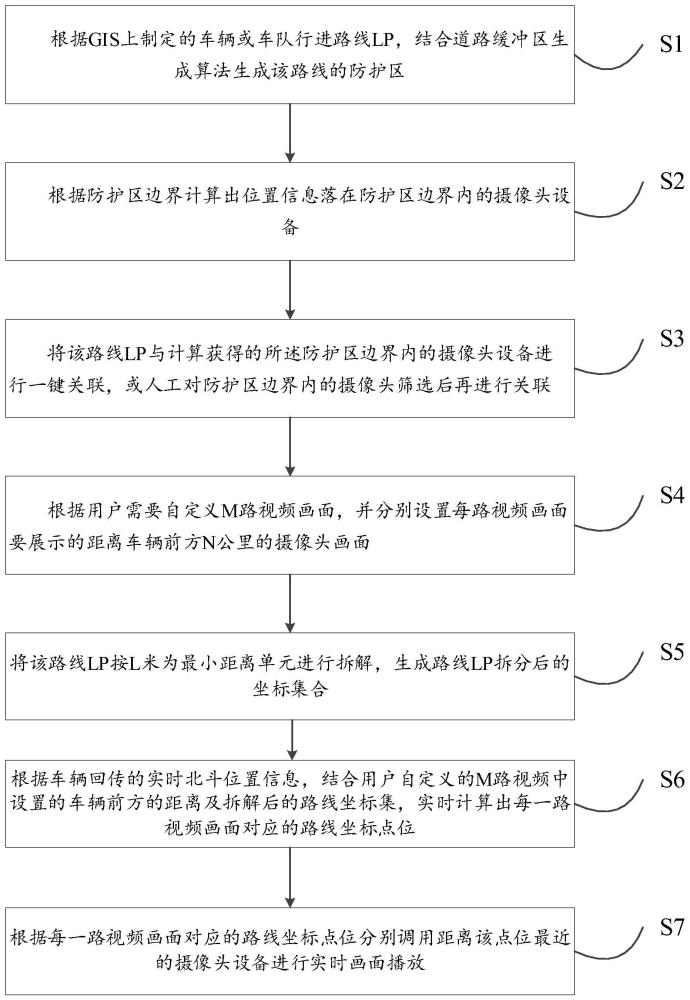
3、根据gis上制定的车辆或车队行进路线lp,结合道路缓冲区生成算法生成该路线的防护区;
4、根据防护区边界计算出位置信息落在防护区边界内的摄像头设备;
5、将该路线lp与计算获得的所述防护区边界内的摄像头设备进行一键关联,或人工对防护区边界内的摄像头筛选后再进行关联;
6、根据用户需要自定义m路视频画面,并分别设置每路视频画面要展示的距离车辆前方n公里的摄像头画面;
7、将该路线lp按l米为最小距离单元进行拆解,生成路线lp拆分后的坐标集合;
8、根据车辆回传的实时北斗位置信息,结合用户自定义的m路视频中设置的车辆前方的距离及拆解后的路线坐标集,实时计算出每一路视频画面对应的路线坐标点位;
9、根据每一路视频画面对应的路线坐标点位分别调用距离该点位最近的摄像头设备进行实时画面播放。
10、优选的,根据防护区边界计算出位置信息落在防护区边界内的摄像头设备,包括采用具备地理位置高性能检索能力的数据库进行检索或采用射线法进行计算,采用射线法进行计算具体包括:
11、从目标点o0朝x轴正方向发起一条射线s,然后计算这条射线s和多边形n所有边[(p1,p2),(p2,p3),(p3,p4),(p4,p5),(p5,p6),(p6,p7),(p7,p8),(p8,p1)]的交点数量;
12、判断交点总数量,若交点总数量为偶数个,则目标点o0在多边形n的外部,若交点总数量为奇数个,则目标点o0在多边形n的内部。
13、进一步优选的,将该路线lp按l米为最小距离单元进行拆解,生成路线lp拆分后的坐标集合,包括最小距离单元l设置为1米,路线lp拆分后的坐标集合为gp,具体包括:
14、根据路线lp的坐标点集合[g1(x1,y1),g2(x2,y2),g3(x3,y3),…,gn(xn,yn)],分别计算相邻两点之间的距离r1,r2,…,rn及相应的方位角a1,a2,…,an;
15、分别计算距离r1,r2,…,rn整除最小距离单元l后得到相应的拆分粒度数量c1,c2,…,cn,若不能整除则按四舍五入取值;
16、根据得到的拆分粒度数量c1,c2,…,cn,相应的方位角a1,a2,…,an,拆分距离l分别计算生成相邻两点间新的坐标集合lp1,lp2,…,lpn;
17、将相邻两点间新的坐标集合lp1,lp2,…,lpn按顺序进行合并得到路线lp按l拆分后的坐标集合gp。
18、进一步优选的,根据车辆回传的实时北斗位置信息,结合用户自定义的m路视频中设置的车辆前方的距离及拆解后的路线坐标集,实时计算出每一路视频画面对应的路线坐标点位,具体包括:
19、根据路线lp拆分后的坐标集合gp,及车辆北斗回传的位置点位信息,采用最邻近距离算法计算出最靠近车辆的路线点位po;
20、根据点位po及其所在坐标集合gp中的数组下标ipo,结合每个点位间的距离l,计算出点位po前方n公里所对应的路线gp点位集合的数组下标ino;
21、判断下标ino是否越界,若下标不越界则取gp[ino]的点位no,若越界则取gp中最后一个点位;
22、数组下标计算表达式如下:
23、
24、进一步优选的,两坐标点的距离计算方法包括,已知点g1(x1,y1),g2(x2,y2)坐标,计算g1g2距离r1,则:
25、赤道半径:
26、rc=6378137
27、点g1的纬度弧度:
28、
29、点g2的纬度弧度:
30、
31、g1g2坐标点的纬度弧度差值:
32、a=rad1-rad2
33、g1g2坐标点的纬度角度差值:
34、
35、则,g1g2两点间的距离:
36、
37、进一步优选的,两点坐标方位角计算包括,已知点g1(x1,y1),g2(x2,y2)坐标,计算g1g2方位角a1,则:
38、赤道半径:
39、rc=6378137
40、极半径:
41、rj=6356725
42、点g1(x1,y1)的经度弧度:
43、
44、点g1(x1,y1)的纬度弧度:
45、
46、点g2(x2,y2)的经度弧度:
47、
48、点g2(x2,y2)的纬度弧度:
49、
50、
51、red=ec×cos(rla1)
52、rdx=(rlo2-ral1)×red
53、rdy=(rla2-rla1)×rec
54、
55、点g2(x2,y2)与点g1(x1,y1)经度的差值:
56、raln=x2-x1
57、点g2(x2,y2)与点g1(x1,y1)纬度的差值:
58、rlat=x2-y1
59、若rlon>0并且rlat≤0,则a1=180-rangle;
60、若rlon≤0并且ralt<0,则a1=180+rangle;
61、若rlon<0并且rlat≥0,则a1=360-rangle;
62、其它情况a1=rangle。
63、进一步优选的,已知点g1(x1,y1),方位角a1,拆分距离l计算另外一点坐标l1(lx1,ly1),则:
64、地球平均半径:
65、arc=6371393
66、根据公式求得l1的经度:
67、
68、根据公式求得l1的纬度:
69、
70、第二方面,本发明实施例还提供一种基于路面摄像头实时视频画面跟踪的系统,包括:
71、生成防护区模块,配置用于根据gis上制定的车辆或车队行进路线lp,结合道路缓冲区生成算法生成该路线的防护区;
72、位置信息计算模块,配置用于根据防护区边界计算出位置信息落在防护区边界内的摄像头设备;
73、关联模块,配置用于将该路线lp与计算获得的所述防护区边界内的摄像头设备进行一键关联,或人工对防护区边界内的摄像头筛选后再进行关联;
74、设置模块,配置用于根据用户需要自定义m路视频画面,并分别设置每路视频画面要展示的距离车辆前方n公里的摄像头画面;
75、拆解模块,配置用于将该路线lp按l米为最小距离单元进行拆解,生成路线lp拆分后的坐标集合;
76、坐标点位计算模块,配置用于根据车辆回传的实时北斗位置信息,结合用户自定义的m路视频中设置的车辆前方的距离及拆解后的路线坐标集,实时计算出每一路视频画面对应的路线坐标点位;
77、调用模块,配置用于根据每一路视频画面对应的路线坐标点位分别调用距离该点位最近的摄像头设备进行实时画面播放。
78、第三方面,本发明实施例提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器实现如第一方面中任一实现方式描述的方法。
79、第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如第一方面中任一实现方式描述的方法。
80、与现有技术相比,本发明的有益成果在于:
81、(1)本发明根据用户在gis上制定的车辆(队)路线及自定义的m路视频中设置的车辆前方的距离,结合车辆回传的北斗位置信息和该路线防护区边界内关联的摄像头设备计算出每路视频画面所对应的距离最近的摄像头设备进而调用该摄像头实时视频流,以此跟踪掌握该路线车辆(队)的实时画面以及前方n公里的路面实况,依托此也可进行后续的指挥调度、规划部署等业务应用场景。
82、(2)本发明提出一种根据安防需要依托制定好的路线、车辆北斗位置信息及路面摄像头设备,通过该技术方案达到对车辆(队)行进路线实时跟踪及掌握车辆(队)前方n公里路面实况,从而解决人工无法高效精准地调阅车辆(队)行进画面及前方n公里实时路况的问题。
- 还没有人留言评论。精彩留言会获得点赞!