一种应用于全隧道施工人员定位的方法及系统与流程
本发明涉及隧道施工,特别地,涉及一种应用于全隧道施工人员定位的方法及系统。
背景技术:
1、近年来,我国隧道施工技术和施工装备得到了很大的发展提升,对施工安全、施工人员、设备管理也提出了更高的要求,而目前隧道工区一般仅配置了门禁系统,只能实现考勤统计功能,不具备安全生产和作业评价管理的功能。而隧道施工环境恶劣、工种复杂多样,亟需一种可以有效进行人员定位和作业评价的管理系统,以对隧道施工进行安全管控。目前,现有技术一般通过rfid标签定位技术对人员进行定位,施工人员通过佩戴有定位功能的工牌,管理人员对施工人员进行追踪和定位等,例如,专利cn209992671u公开了一种隧道人员rfid定位管理系统,其通过rfid技术对隧道施工人员进行定位,但受限于rfid的定位精度,仅适用于人员区域性定位,对于掌子面等具有较高施工风险的区域,无法在出现危险时精准定位人员位置。另外,目前也暂未有针对施工人员和施工设备的作业绩效进行评价的方法。
技术实现思路
1、本发明提供了一种应用于全隧道施工人员定位的方法及系统,以解决现有技术存在的定位精度差、无法对施工人员和施工设备的作业绩效进行评价的技术问题。
2、根据本发明的一个方面,提供一种应用于全隧道施工人员定位的方法,包括以下内容:
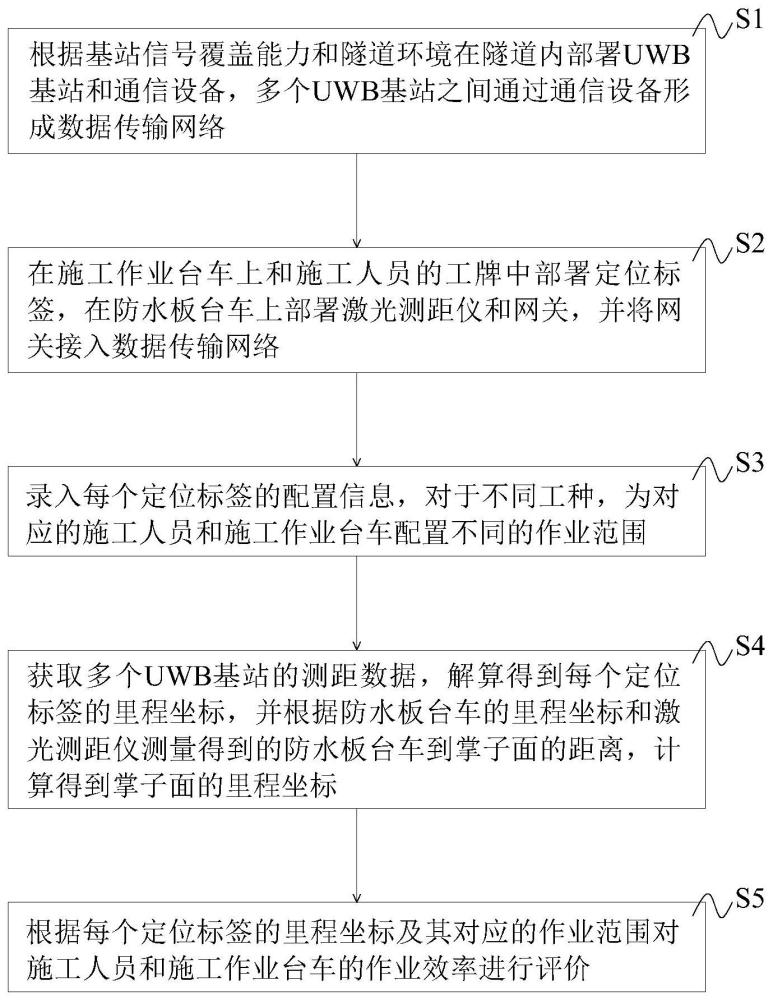
3、根据基站信号覆盖能力和隧道环境在隧道内部署uwb基站和通信设备,多个uwb基站之间通过通信设备形成数据传输网络;
4、在施工作业台车上和施工人员的工牌中部署定位标签,在防水板台车上部署激光测距仪和网关,并将网关接入数据传输网络;
5、录入每个定位标签的配置信息,对于不同工种,为对应的施工人员和施工作业台车配置不同的作业范围;
6、获取多个uwb基站的测距数据,解算得到每个定位标签的里程坐标,并根据防水板台车的里程坐标和激光测距仪测量得到的防水板台车到掌子面的距离,计算得到掌子面的里程坐标;
7、根据每个定位标签的里程坐标及其对应的作业范围对施工人员和施工作业台车的作业效率进行评价。
8、进一步地,假设uwb基站的信号覆盖范围为左右各n米,则相邻两个uwb基站之间的部署间隔为2n*α,α的取值范围为0~1,且隧道环境中遮挡物越多,α的取值越小。
9、进一步地,多个uwb基站安装在洞壁上同一高度处且位于同一水平线上。
10、进一步地,所述根据每个定位标签的里程坐标及其对应的作业范围对施工人员和施工作业台车的作业效率进行评价的过程具体为:
11、将每个定位标签的里程坐标与洞口里程进行比对,若里程坐标大于洞口里程,则视为标签进洞,若里程坐标小于等于洞口里程,则视为标签出洞;
12、记录标签进洞时间和标签出洞时间,将前后相邻的标签进洞时间和标签出洞时间视为一个作业时间区间;
13、获取每个作业时间区间内定位标签的里程坐标,将其与对应的作业范围进行对比,得到施工人员和施工作业台车的有效作业时长、移动时长和静止时长;
14、基于每个作业时间区间内的有效作业时长、移动时长和静止时长与标签对应的平均作业时长指标进行对比,根据对比结果对施工人员和施工作业台车在每个作业时间区间内的作业效率进行自动评价。
15、进一步地,当定位标签的里程坐标位于作业范围内,则判定施工人员或施工作业台车处于有效工作状态,并记录有效工作时长;当定位标签的里程坐标位于作业范围外,且该时刻的里程坐标与前一时刻的里程坐标不一致,则判定施工人员或施工作业台车处于移动状态,并记录移动时长;当定位标签的里程坐标位于作业范围外,且该时刻的里程坐标与前一时刻的里程坐标一致,则判定施工人员或施工作业台车处于静止状态,并记录静止时长。
16、进一步地,对于不同工种,还为对应的施工人员和施工作业台车配置不同的禁区围栏范围,在获得各个定位标签的里程坐标之后还包括以下内容:
17、根据每个定位标签的里程坐标及其对应的禁区围栏范围判断是否出现违规行为,若出现违规行为则生成违规记录。
18、进一步地,作业范围和禁区围栏范围的设置基准设置为其与掌子面里程的距离。
19、进一步地,定位标签的配置信息包括唯一id、标签类型、名称、工种、禁区围栏范围和作业范围。
20、另外,本发明还提供一种应用于全隧道施工人员定位的系统,包括:
21、基站部署模块,用于根据基站信号覆盖能力和隧道环境在隧道内部署uwb基站和通信设备,多个uwb基站之间通过通信设备形成数据传输网络;
22、标签部署模块,用于在施工作业台车上和施工人员的工牌中部署定位标签,在防水板台车上部署激光测距仪和网关,并将网关接入数据传输网络;
23、标签配置模块,用于录入每个定位标签的配置信息,对于不同工种,为对应的施工人员和施工作业台车配置不同的作业范围;
24、位置解算模块,用于获取多个uwb基站的测距数据,解算得到每个定位标签的里程坐标,并根据防水板台车的里程坐标和激光测距仪测量得到的防水板台车到掌子面的距离,计算得到掌子面的里程坐标;
25、作业评价模块,用于根据每个定位标签的里程坐标及其对应的作业范围对施工人员和施工作业台车的作业效率进行评价。
26、进一步地,所述标签配置模块还为不同工种对应的施工人员和施工作业台车配置不同的禁区围栏范围,系统还包括:
27、违规记录模块,用于根据每个定位标签的里程坐标及其对应的禁区围栏范围判断是否出现违规行为,若出现违规行为则生成违规记录。
28、本发明具有以下效果:
29、本发明的一种应用于全隧道施工人员定位的方法,根据基站信号覆盖能力和隧道环境在隧道内部署uwb基站和通信设备,多个uwb基站之间通过通信设备形成数据传输网络,从而利用uwb基站的高精度定位优点在隧道内构建了一个信号传输稳定、定位精度高的人机定位系统,可以精准地定位出施工人员和施工作业台车在隧道内的实时位置。并且,通过在防水板台车上部署激光测距仪,结合uwb定位技术和激光测距技术可以实现掌子面的精准定位,便于对隧道施工进度进行准确评估。更重要的是,本发明提出了一种基于人机定位和作业范围来评估施工人员和施工作业台车的作业效率的评价体系,可以在隧道施工过程的各个阶段对施工人员和施工作业台车的作业效率进行准确的自动评价。
30、另外,本发明的一种应用于全隧道施工人员定位的系统同样具有上述优点。
31、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
技术特征:
1.一种应用于全隧道施工人员定位的方法,其特征在于,包括以下内容:
2.如权利要求1所述的一种应用于全隧道施工人员定位的方法,其特征在于,假设uwb基站的信号覆盖范围为左右各n米,则相邻两个uwb基站之间的部署间隔为2n*α,α的取值范围为0~1,且隧道环境中遮挡物越多,α的取值越小。
3.如权利要求2所述的一种应用于全隧道施工人员定位的方法,其特征在于,多个uwb基站安装在洞壁上同一高度处且位于同一水平线上。
4.如权利要求1所述的一种应用于全隧道施工人员定位的方法,其特征在于,所述根据每个定位标签的里程坐标及其对应的作业范围对施工人员和施工作业台车的作业效率进行评价的过程具体为:
5.如权利要求4所述的一种应用于全隧道施工人员定位的方法,其特征在于,当定位标签的里程坐标位于作业范围内,则判定施工人员或施工作业台车处于有效工作状态,并记录有效工作时长;当定位标签的里程坐标位于作业范围外,且该时刻的里程坐标与前一时刻的里程坐标不一致,则判定施工人员或施工作业台车处于移动状态,并记录移动时长;当定位标签的里程坐标位于作业范围外,且该时刻的里程坐标与前一时刻的里程坐标一致,则判定施工人员或施工作业台车处于静止状态,并记录静止时长。
6.如权利要求1所述的一种应用于全隧道施工人员定位的方法,其特征在于,对于不同工种,还为对应的施工人员和施工作业台车配置不同的禁区围栏范围,在获得各个定位标签的里程坐标之后还包括以下内容:
7.如权利要求6所述的一种应用于全隧道施工人员定位的方法,其特征在于,作业范围和禁区围栏范围的设置基准设置为其与掌子面里程的距离。
8.如权利要求1所述的一种应用于全隧道施工人员定位的方法,其特征在于,定位标签的配置信息包括唯一id、标签类型、名称、工种、禁区围栏范围和作业范围。
9.一种应用于全隧道施工人员定位的系统,其特征在于,包括:
10.如权利要求9所述的一种应用于全隧道施工人员定位的系统,其特征在于,所述标签配置模块还为不同工种对应的施工人员和施工作业台车配置不同的禁区围栏范围,系统还包括:
技术总结
本发明公开了一种应用于全隧道施工人员定位的方法及系统,其根据基站信号覆盖能力和隧道环境在隧道内部署UWB基站和通信设备,多个UWB基站之间通过通信设备形成数据传输网络,利用UWB基站的高精度定位优点在隧道内构建了一个信号传输稳定、定位精度高的人机定位系统,可以精准地定位出施工人员和施工作业台车在隧道内的实时位置。并且,结合UWB定位技术和激光测距技术可以实现掌子面的精准定位,便于对隧道施工进度进行准确评估。并且,还提出了一种基于人机定位和作业范围来评估施工人员和施工作业台车的作业效率的评价体系,可以在隧道施工过程的各个阶段对施工人员和施工作业台车的作业效率进行准确的自动评价。
技术研发人员:秦念稳,马治中,张雪荣,那利国,施浪,孙伟,张行道,叶锋
受保护的技术使用者:中国铁建重工集团股份有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!