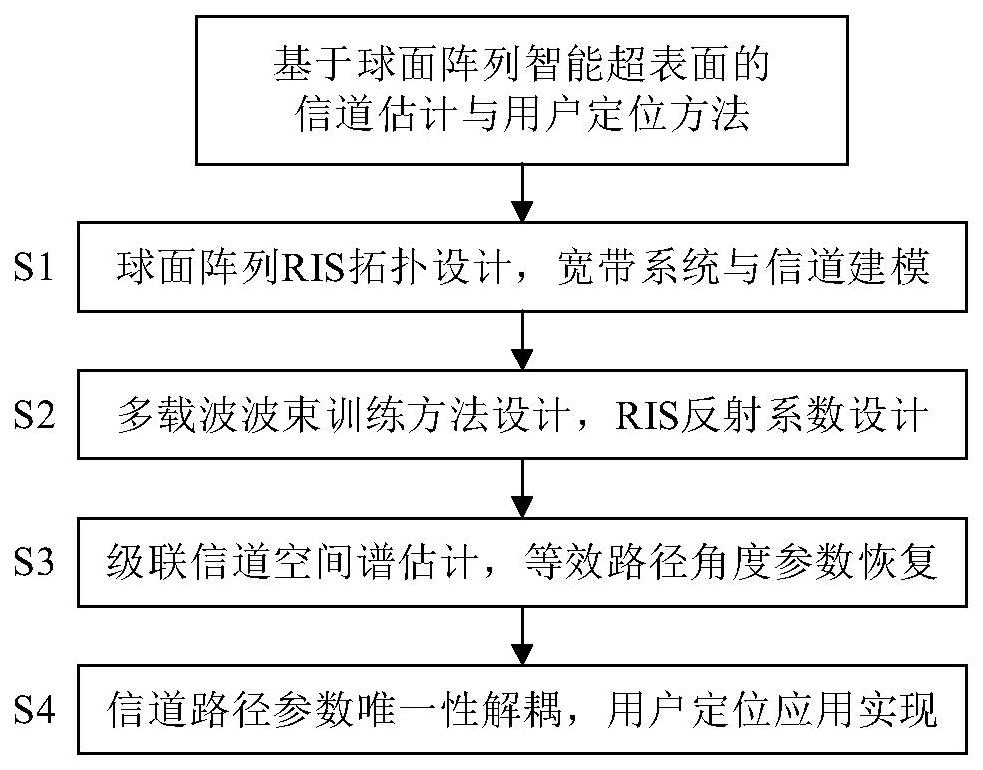
一种基于球面阵列智能超表面的信道估计和用户定位方法
本发明涉及无线通信与感知,特别涉及一种基于球面阵列智能超表面的信道估计和用户定位方法。
背景技术:
1、下一代移动通信(6g)的技术内涵将从传统无线通信向信息感知和大数据纵向延伸,技术要素将涵盖信息传递、信息采集和信息计算。以信息感知为核心的移动互联网和垂直行业新兴业务逐渐涌现,社会经济信息化需求促进了以通信感知一体化(isac)为重点的6g技术发展新趋势。
2、面向6g的isac系统需要增强型无线空口技术的支持,驱动着毫米波/太赫兹通信和多输入多输出(mimo)技术发展。然而,“以规模换增益”的技术演进路线面临成本、能耗和复杂度增加的固有问题。为发展创新、高效和绿色的无线方案,业界寻求信息交互模式的颠覆性变革。智能超表面(ris)技术凭借其特有的低开销、可编程和易部署优势脱颖而出,成为6g通感一体化建设最具潜力的关键技术之一。
3、ris的物理实质是亚波长电磁单元规则排列构成的可重构超表面阵列,通过数字编码动态调控电磁波,形成幅相、极化和频率可控的电磁场。有别于传统无线系统,基于智能超表面的通感一体化(ris-isac)系统以ris的配置和调控策略为核心,通过丰富散射信道、同相叠加信号和控制波束方向,提高复用增益、对抗多径衰落和增强系统覆盖。ris-isac技术有望突破信道不可控的固有桎梏,构建可编程智能无线环境,引入未来6g通感融合的新范式。
4、为充分发掘ris对isac无线系统性能的增益潜力,必须获得准确的信道状态信息。由于ris无源单元不具有信号接收和处理能力,传统信道估计方法的导频长度与ris阵列规模成正比,导致大规模mimo系统的训练开销过大。此外,常规的ris平面阵列结构会损失三维物理空间信道信息,引入固有的信道估计模糊,无法支持高精度的用户定位、环境制图等信息感知业务。
技术实现思路
1、技术问题:本发明的目的是提供一种基于球面阵列智能超表面的信道估计和用户定位方法,将ris辅助通信与感知进行系统融合,极大地拓展了ris在无线系统中的应用场景。能够以较低的硬件成本和训练开销实现现有平面阵列ris无法支持的无模糊参数解耦与信道估计,进而实现高精度的用户定位应用。
2、技术方案:
3、s1、ris系统与信道建模
4、所述球面阵列ris采用nr个反射单元,绕半径为r的球面规则分布,其中阵元n的球坐标方位角为φn,俯仰角为θn;设远场平面电磁波入射方位角为φ,俯仰角为θ,方向向量为则ris球面阵列流形为
5、
6、其中,k0=2π/λc为基础波长λc的电磁波波数。下标r指代ris相关参数,exp(x)=ex为以自然常数e为底的指数函数,(·)t表示转置,表示虚数单位。
7、所述ris辅助的isac无线系统中基站配置nb单元天线阵列,u个用户配置单天线,宽带系统拥有k路子载波,基础频率为fc,传输带宽为fs。所述球面阵列ris部署于近用户侧,用户至ris信道由视距径主导,基站至ris信道视距径受阻,由非视距散射径构成。令表示维度为m×n的实数域和复数域空间,则子载波k的基站和用户u至ris的上行信道和分别建模为
8、
9、其中,下标b,u,d,a分别指代基站bs、用户user、出发角aod和到达角aoa相关参数。p为hbr,k散射路径数,fk=fc+kfs/k为子载波k频率。τbr,p,αbr,p分别为hbr,k散射径p的时延和衰落,τru,u,αru,u分别为hru,u,k视距径的时延和衰落。φb,p,φd,p,θd,p分别为hbr,k散射径p的基站侧到达方位角、ris侧出发方位角和俯仰角,φa,u,θa,u分别为hru,u,k视距径的ris侧到达方位角和俯仰角。根据自由空间损耗原理,散射径和视距径衰落分别建模为αbr,p∝(4πfcτbr,p)-1和αru,u=(4πfcτru,u)-1,其中比例符号∝表征前者包含未知散射损耗。
10、s2、波束训练方法设计
11、信道估计波束训练使用str个数据流、ttr个时间帧和ktr个频域子载波。在数据流s上配置基站波束赋形向量在训练帧t内配置ris反射系数向量用户u发送导频符号xu,k,则子载波k的上行接收训练信号建模为
12、
13、其中,为基站波束赋形器,为等效级联信道,为高斯白噪声。⊙表示khatri-rao乘积,diag(x)表示以x为对角元素的矩阵,eq指代等效信道相关参数。heq,u,k根据式(2)可改写为
14、
15、其中,表示hadamard乘积。将式(4)代入式(3)得
16、
17、其中,i=pu为级联路径数量,二维索引映射为一维索引和分别为路径i的等效衰落和等效时延,和分别为路径i的方位角和俯仰角参数集合,和χi,k分别为路径i的基站侧等效到达角和等效导频。定义映射关系则有和
18、合并ktr个子载波上ttr个训练帧内的接收训练信号,构建三阶数据张量其中索引(t,k)的模式-1纤维向量存储信号向量的有效信号部分服从标准多元(cp)张量模型
19、
20、其中,为ris反射系数序列,为基站等效阵列响应向量,为ris阵列响应向量,为路径等效增益,其中[geq,i]k=χi,kexp(-j2πfkτeq,i)。为核张量,其中其余元素为0。为高斯噪声张量。表示向量外积,×n表示模式-n的张量—矩阵乘积。
21、假设基站天线阵列流形为ab(μ)=[exp(-jμ(nb-1)/2),...,1,...,exp(jμ(nb-1)/2)]t,其中为天线间距db下方位角φ对应的空间频率。采用离散fourier变换(dft)设计基站波束赋形器为
22、
23、其中,为搜索精度2π/nb下的整数搜索码字。
24、为利用球面阵列对称性,基于阵元域流形的相位模式激励原理,采用球面fourier变换(sft)设计ris反射系数。具体地,(l,m)阶球面谐波的加权波束赋形向量表示为
25、
26、其中,l∈{0,1,...},m∈{-l,...,l},阶数(l,m)与训练帧序列t的映射关系为为阵元n信号响应的加权权重。yl,m(φ,θ)为(l,m)阶球面谐波函数
27、
28、其中,plm(cosθ)表示连带legendre函数,定义为
29、
30、其中,pl(cosθ)表示l阶legendre函数。
31、s3、信道角度参数估计
32、基于cp张量的性质,训练信号的模式-1展开表示为
33、
34、其中,为基站实际阵列响应向量,为噪声张量的模式-1展开。式(7)波束赋形向量可导出实值波束域流形设计搜索码字{ωs}构成db个搜索域,则波束赋形器wb保留基站天线阵列的相移旋转不变特性如下
35、
36、其中,为选择矩阵。采用酉—旋转不变信号参数估计算法(u-esprit)获得基站实际到达角的估计值重构基站阵列响应向量计算其中表示矩阵伪逆。新张量的模式-(2,3)切片矩阵可表示为
37、
38、其中,ip(u)=(p-1)u+u为基于映射关系的路径索引,为等效噪声。由式(13)求解信道参数等价于p个观测矩阵为ψ,成分数为u的压缩感知子问题。
39、根据球面阵列ris拓扑,路径在ris阵元n处的电磁响应为
40、
41、其中,req,i,分别表示级联路径等效方向向量的模值、方位角和俯仰角,与组成路径角度参数φeq,i,θeq,i具有如下等式关系
42、
43、记d(φd,p,θd,p)+d(φa,u,θa,u)的元素值为xeq,i,yeq,i,zeq,i,则有其中modn(·)表示模-n的取模运算,arctan2(·,·)和arccos(·)分别表示四象限反正切和反余弦运算。
44、为简便表示,暂时忽略相关等效角度参数的下标eq,i,将式(8)的球函数分解为球面fourier模式的和,可重写为
45、
46、其中,jl(·)表示第一类l阶球面bessel函数,(·)*表示共轭运算。结合式(8),(16)可得球面相位模式对阵元域流形的激励为
47、
48、球面相位模式的离散激励目标是选择阵元域流形相应的球面fourier模式。由于球面bessel函数指数衰减,有限规模的ris球面阵列孔径只能激发有限数量的模式,设l为可激发模式的最高阶数,根据经验法则确定l的值为
49、
50、其中,表示向上取整。级联路径等效方向向量的模r≤2,则最高阶数l的上界为有效激励球面相位模式的总数为ttr=(l+1)2。
51、设计ris反射单元参数{φn,θn}服从t-design分布,对于以下球面谐波正交性成立
52、
53、其中,δ(x)表示离散delta函数。设计波束赋形权重为则式(17)可化简为
54、
55、设计和则ris波束赋形的波束域阵列响应向量为
56、
57、(l,m)阶球面谐波具有如下递归性质
58、
59、其中,为利用此性质,定义为波束域流形的子向量,其中为选择矩阵,分别提取各阶子向量的前、中、后(2l+1)个元素。式(22)递归关系通过如下关系式将各元素联系起来
60、
61、其中,对角阵分别定义为
62、
63、计算式(13)采样自相关矩阵其中(·)h表示共轭转置。特征值分解可获得u个最大特征值对应的特征向量组以表征信号子空间。存在非奇异变换矩阵满足其中为对应的式(21)波束域流形向量。此时式(23)可改写为子空间形式
64、
65、其中,c=-1,0,1。其中当l2≥2u时,式(25)为超定方程组,最小二乘解为作特征值分解可得重复上述esprit子空间算法可求解p组压缩感知子问题。
66、s4、参数解耦和用户定位
67、获得后,级联路径等效方向向量的两组角度估计值为
68、
69、其中,|·|和arg(·)分别表示取模和取相位运算,arctan(·)表示反正切运算。为筛选出正确的角度估计值,并估计等效方向向量的模{req,i},对作特征值分解获得(ttr-u)个最小特征值对应的特征向量组以表征噪声子空间。基于信号与噪声子空间的正交性,构建多信号分类算法(music)波束域谱
70、
71、代入各组并进行一维搜索,仅有正确估计值会使出现一个明显谱峰,其位置即为等效方向向量模的估计值
72、根据恢复对于可构建关于{φd,p,θd,p,φa,u,θa,u}总计2(u+1)个未知变量的3u个有效约束方程,当u≥2时为超定方程组,求解此非线性方程组,可实现信道角度参数的唯一性解耦,统计p组压缩感知子问题解的解耦结果,可获得更精确的估计值
73、将回代入式(6)的ris阵列流形,计算其中包含估计参数对应ris和基站阵列响应向量,为的模式-3展开。信道估计波束训练采用连续ktr≤k路相邻子载波传输导频符号,则等效时延有最小二乘解
74、
75、等效路径衰落可通过下式恢复
76、
77、选择基站至ris信道路径p对应的等效路径根据自由空间损耗模型可得则用户至ris信道传播时延的估计值可通过下式获得
78、
79、此外,有基于时延参数估计结果易反推出对应路径衰落的估计值。至此,球面阵列ris辅助信道估计方法实现了基站和用户至ris信道多径角度、时延及衰落参数的唯一性解耦。
80、基于用户至ris视距路径的角度和时延参数信息,用户定位应用可通过方位——距离定位方法直接实现
81、
82、其中,为ris的先验物理位置信息,vc为电磁波传播速度。
83、本发明基于球面阵列ris的信道估计和用户定位方法总结为以下算法,此算法基本采用代数运算,不涉及随机初始化、循环迭代等操作,因此能够以较低的计算复杂度和运行鲁棒性获得高精度的信道估计结果。
84、
85、有益效果:与现有技术相比,本发明的优点是:
86、1)本发明设计了球面阵列ris的拓扑新范式,支持三维全空间域的电磁波信号反射传播,大幅拓展了平面阵列ris支持的半空间域。
87、2)本发明设计了基于球面阵列ris的信道估计方法,支持三维空间路径参数的精确恢复与唯一性解耦,相较于存在参数估计模糊的平面阵列ris,实现了质的突破。
88、3)本发明设计了基于相位模式激励原理的ris反射系数训练图样,可大幅减少大规模
89、ris辅助无线系统的信道估计导频开销。
90、4)本发明设计了基于ris的深度信道估计的用户定位方法,实现了基于ris的通信感知一体化,有效拓展了ris在无线系统中的应用场景。
- 还没有人留言评论。精彩留言会获得点赞!