基于目标跟踪的视频监控方法和系统与流程
本发明涉及视频监控的领域,尤其涉及基于目标跟踪的视频监控方法和系统。
背景技术:
1、为了保证公共场所的安全,会在公共场所安装摄像头,以此对公共场所进行实时视频拍摄,并识别分析拍摄得到的视频,从而确定公共场所内部的人员流动及其他状态。现有的摄像头都是存在一定的拍摄视场范围,当目标对象因移动而超出该拍摄视场范围后,将无法继续对目标对象进行拍摄,也无法掌握目标对象的行踪,降低视频监控的准确性和可靠性。虽然现有的摄像头能够进行镜头转动而改变拍摄方向,这样在一定程度上可以增大摄像头的拍摄视场范围,但是依然无法满足对目标对象进行准确定向跟踪拍摄的需求。
技术实现思路
1、本发明的目的在于提供基于目标跟踪的视频监控方法和系统,分析摄像头在初始视频拍摄状态下采集目标区域的初始视频影像,在目标区域内确定处于不同方位的若干标识物,以此利用目标区域自身存在的物体进行方位标识,并确定与目标区域邻接的所有周边区域,便于后续对运动的目标对象进行准确定向的分区域追踪拍摄;再从初始视频影像中识别目标对象的活动状态信息,并结合所有标识物的位置信息,预测目标对象将要前往的周边区域,便于有针对性调整摄像头的拍摄动作,实现对目标对象进行追踪拍摄,保证对运动的目标对象精确追踪;再分析追踪视频影像,判断目标对象是否已经运动超出摄像头的视频拍摄范围,增大对目标对象的追踪拍摄范围和精度,及时快速掌握目标对象的活动情况。
2、本发明是通过以下技术方案实现:
3、基于目标跟踪的视频监控方法,包括:
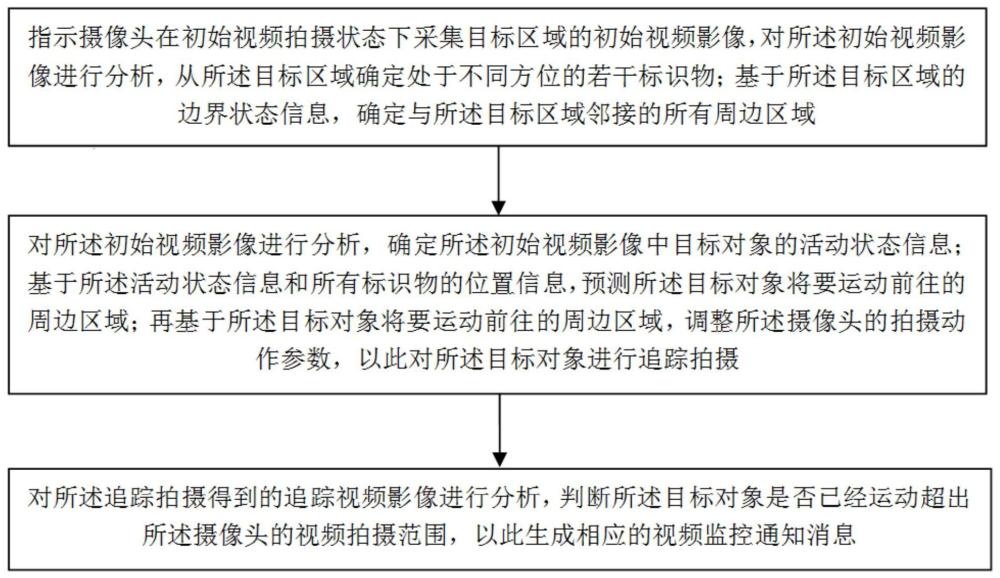
4、指示摄像头在初始视频拍摄状态下采集目标区域的初始视频影像,对所述初始视频影像进行分析,从所述目标区域确定处于不同方位的若干标识物;基于所述目标区域的边界状态信息,确定与所述目标区域邻接的所有周边区域;
5、对所述初始视频影像进行分析,确定所述初始视频影像中目标对象的活动状态信息;基于所述活动状态信息和所有标识物的位置信息,预测所述目标对象将要运动前往的周边区域;再基于所述目标对象将要运动前往的周边区域,调整所述摄像头的拍摄动作参数,以此对所述目标对象进行追踪拍摄;
6、对所述追踪拍摄得到的追踪视频影像进行分析,判断所述目标对象是否已经运动超出所述摄像头的视频拍摄范围,以此生成相应的视频监控通知消息。
7、可选地,指示摄像头在初始视频拍摄状态下采集目标区域的初始视频影像,对所述初始视频影像进行分析,从所述目标区域确定处于不同方位的若干标识物;基于所述目标区域的边界状态信息,确定与所述目标区域邻接的所有周边区域,包括:
8、指示摄像头在居中视频拍摄方向下采集目标区域的初始视频影像;其中,所述居中视频拍摄方向是指所述摄像头对应的允许改变的拍摄方向范围中位于居中方向的视频拍摄方向;
9、对所述初始视频影像进行分帧处理,得到若干视频影像帧,并提取所有视频影像帧各自对应的画面像素轮廓特征信息;基于所述画面像素轮廓特征信息,确定在所述摄像头拍摄过程中所述目标区域存在的未发生移动的若干物体;
10、从其中一个视频影像帧中提取每个物体及其对应的背景环境的画面像素纹理特征信息,基于所述画面像素纹理特征信息,确定每个物体与其对应的背景环境之间的画面像素对比度;再基于所述画面像素对比度,从若干物体中筛选得到若干标识物;
11、基于所述目标区域的四周边界位置信息,确定分别与所述目标区域的所有边界邻接的周边区域,以及每个周边区域与所述目标区域的相对方位信息。
12、可选地,基于所述画面像素轮廓特征信息,确定在所述摄像头拍摄过程中所述目标区域存在的未发生移动的若干物体,包括:
13、步骤s1,利用下面公式(1),对所述初始视频影像中的每一帧图像进行分析,判断是否存在未发生移动的像素点,
14、
15、在上述公式(1)中,c表示判断是否存在未发生移动的像素点的判定值;g表示中间运算矩阵;g(i,j)表示矩阵中第i行第j列像素点的像素值;g_a表示所述初始视频影像中的第a帧图像矩阵;g_1表示所述初始视频影像中的第1帧图像矩阵;||表示求取绝对值;n表示所述图像矩阵中任意一列像素点总个数;m表示所述图像矩阵中任意一行像素点总个数;d表示所述初始视频影像中的总帧数值;
16、若c=1,则表示所述初始视频影像存在未发生移动的像素点;
17、若c=0,则表示所述初始视频影像不存在未发生移动的像素点,即在所述摄像头拍摄过程中所述目标区域不存在未发生移动的若干物体;
18、步骤s2,当所述初始视频影像存在未发生移动的像素点,利用下面公式(2),根据所述初始视频影像中的每一帧图像的像素点,得到每一帧图像对应的筛选矩阵,
19、
20、在上述公式(2)中,s_k(i,j)表示第k帧图像对应的筛选矩阵中第i行第j列像素点的像素值;g_k(i,j)表示所述初始视频影像中的第k帧图像矩阵中第i行第j列像素点的像素值;g_e(i,j)表示所述初始视频影像中的第e帧图像矩阵中第i行第j列像素点的像素值,其中e≠k;f{}表示判断函数,若括号内的算式成立,则判断函数的函数值为1,若括号内的算式不成立,则判断函数的函数值为0;
21、步骤s3,利用下面公式(3),根据每一帧图像对应的筛选矩阵,得到所述目标区域存在的未发生移动的图像矩阵,
22、
23、在上述公式(3)中,中t(i,j)表示所述目标区域存在的未发生移动的图像矩阵;
24、对所述目标区域存在的未发生移动的图像矩阵中存在的物体进行标注,从而确定在所述摄像头拍摄过程中所述目标区域存在的未发生移动的若干物体。
25、可选地,对所述初始视频影像进行分析,确定所述初始视频影像中目标对象的活动状态信息;基于所述活动状态信息和所有标识物的位置信息,预测所述目标对象将要运动前往的周边区域;再基于所述目标对象将要运动前往的周边区域,调整所述摄像头的拍摄动作参数,以此对所述目标对象进行追踪拍摄,包括:
26、对所述初始视频影像进行分析,识别得到目标对象在所述初始视频影像的身体轮廓特征信息;其中,所述身体轮廓特征信息包括所述目标对象的脸部轮廓特征信息和/或肢体轮廓特征信息;
27、基于所述身体轮廓特征信息,对所述初始视频影像进行目标对象追踪识别,得到所述目标对象的活动路径信息;
28、将所述活动路径信息与所述标识物的位置信息进行对比,确定所述目标对象移动靠近的标识物;基于所述目标对象移动靠近的标识物与所述目标区域的所有边界之间的距离,预测所述目标对象将要运动前往的周边区域;
29、再基于所述目标对象将要运动前往的周边区域与所述目标区域的相对方位信息,调整所述摄像头的拍摄视场方向,以此对所述目标对象进行追踪拍摄。
30、可选地,对所述追踪拍摄得到的追踪视频影像进行分析,判断所述目标对象是否已经运动超出所述摄像头的视频拍摄范围,以此生成相应的视频监控通知消息,包括:
31、对所述追踪拍摄得到的追踪视频影像进行识别,得到所述目标对象不出现在所述追踪视频影像的持续时间;若所述持续时间大于或等于预设时间阈值,则判断所述目标对象已经运动超出摄像头的视频拍摄范围,并向视频监控平台返回相应的视频监控通知消息;其中,所述视频监控通知消息包括所述目标对象当前的运动方向信息。
32、基于目标跟踪的视频监控系统,包括:
33、初始影像拍摄控制与分析模块,用于指示摄像头在初始视频拍摄状态下采集目标区域的初始视频影像,对所述初始视频影像进行分析,从所述目标区域确定处于不同方位的若干标识物;
34、周边区域确定模块,用于基于所述目标区域的边界状态信息,确定与所述目标区域邻接的所有周边区域;
35、目标对象识别模块,用于对所述初始视频影像进行分析,确定所述初始视频影像中目标对象的活动状态信息;基于所述活动状态信息和所有标识物的位置信息,预测所述目标对象将要运动前往的周边区域;
36、拍摄动作调整模块,用于基于所述目标对象将要运动前往的周边区域,调整所述摄像头的拍摄动作参数,以此对所述目标对象进行追踪拍摄;
37、追踪影像分析与消息生成模块,用于对所述追踪拍摄得到的追踪视频影像进行分析,判断所述目标对象是否已经运动超出所述摄像头的视频拍摄范围,以此生成相应的视频监控通知消息。
38、可选地,所述初始影像拍摄控制与分析模块用于指示摄像头在初始视频拍摄状态下采集目标区域的初始视频影像,对所述初始视频影像进行分析,从所述目标区域确定处于不同方位的若干标识物,包括:
39、指示摄像头在居中视频拍摄方向下采集目标区域的初始视频影像;其中,所述居中视频拍摄方向是指所述摄像头对应的允许改变的拍摄方向范围中位于居中方向的视频拍摄方向;
40、对所述初始视频影像进行分帧处理,得到若干视频影像帧,并提取所有视频影像帧各自对应的画面像素轮廓特征信息;基于所述画面像素轮廓特征信息,确定在所述摄像头拍摄过程中所述目标区域存在的未发生移动的若干物体;
41、从其中一个视频影像帧中提取每个物体及其对应的背景环境的画面像素纹理特征信息,基于所述画面像素纹理特征信息,确定每个物体与其对应的背景环境之间的画面像素对比度;再基于所述画面像素对比度,从若干物体中筛选得到若干标识物;
42、所述周边区域确定模块用于基于所述目标区域的边界状态信息,确定与所述目标区域邻接的所有周边区域,包括:
43、基于所述目标区域的四周边界位置信息,确定分别与所述目标区域的所有边界邻接的周边区域,以及每个周边区域与所述目标区域的相对方位信息。
44、可选地,所述目标对象识别模块用于对所述初始视频影像进行分析,确定所述初始视频影像中目标对象的活动状态信息;基于所述活动状态信息和所有标识物的位置信息,预测所述目标对象将要运动前往的周边区域,包括:
45、对所述初始视频影像进行分析,识别得到目标对象在所述初始视频影像的身体轮廓特征信息;其中,所述身体轮廓特征信息包括所述目标对象的脸部轮廓特征信息和/或肢体轮廓特征信息;
46、基于所述身体轮廓特征信息,对所述初始视频影像进行目标对象追踪识别,得到所述目标对象的活动路径信息;
47、将所述活动路径信息与所述标识物的位置信息进行对比,确定所述目标对象移动靠近的标识物;基于所述目标对象移动靠近的标识物与所述目标区域的所有边界之间的距离,预测所述目标对象将要运动前往的周边区域;
48、所述拍摄动作调整模块用于基于所述目标对象将要运动前往的周边区域,调整所述摄像头的拍摄动作参数,以此对所述目标对象进行追踪拍摄,包括:
49、基于所述目标对象将要运动前往的周边区域与所述目标区域的相对方位信息,调整所述摄像头的拍摄视场方向,以此对所述目标对象进行追踪拍摄。
50、可选地,所述追踪影像分析与消息生成模块用于对所述追踪拍摄得到的追踪视频影像进行分析,判断所述目标对象是否已经运动超出所述摄像头的视频拍摄范围,以此生成相应的视频监控通知消息,包括:
51、对所述追踪拍摄得到的追踪视频影像进行识别,得到所述目标对象不出现在所述追踪视频影像的持续时间;若所述持续时间大于或等于预设时间阈值,则判断所述目标对象已经运动超出摄像头的视频拍摄范围,并向视频监控平台返回相应的视频监控通知消息;其中,所述视频监控通知消息包括所述目标对象当前的运动方向信息。
52、与现有技术相比,本发明具有如下有益效果:
53、本技术提供的基于目标跟踪的视频监控方法和系统分析摄像头在初始视频拍摄状态下采集目标区域的初始视频影像,在目标区域内确定处于不同方位的若干标识物,以此利用目标区域自身存在的物体进行方位标识,并确定与目标区域邻接的所有周边区域,便于后续对运动的目标对象进行准确定向的分区域追踪拍摄;再从初始视频影像中识别目标对象的活动状态信息,并结合所有标识物的位置信息,预测目标对象将要前往的周边区域,便于有针对性调整摄像头的拍摄动作,实现对目标对象进行追踪拍摄,保证对运动的目标对象精确追踪;再分析追踪视频影像,判断目标对象是否已经运动超出摄像头的视频拍摄范围,增大对目标对象的追踪拍摄范围和精度,及时快速掌握目标对象的活动情况。
- 还没有人留言评论。精彩留言会获得点赞!