一种基于高度阶梯映射的ADS-B无人机航迹监视方法
本发明属于无人机航迹监视,具体涉及一种基于高度阶梯映射的ads-b无人机航迹监视方法。
背景技术:
1、当前,随着低空应用对无人机需求量的不断增大,无人机已经在许多场景中扮演十分重要的角色。然而,低空的飞行环境复杂多变,无人机在其中飞行需要面对许多危险情况的挑战。因此,需要对无人机进行持续性监视以保证无人机在低空中的飞行安全。
2、ads-b(automatic dependent surveillance broadcast)作为国内外民航领域中常用的监视技术,具有广播频次高,搭建简单和成本低等优势。无人机在低空中受到风力、飞鸟和障碍物多种外在因素的影响,需要高频监视其飞行信息,因此,考虑到ads-b在航迹监视方面的优势,可以胜任对无人机的监视需求。
3、ads-b的设计初衷是服务于高空大飞机,因此在有限的编码位数上尽可能地覆盖飞行高度,ads-b最小高度分辨率为25英尺。然而,对于低空中的无人机,25英尺难以对其飞行位置进行准确的描述,在监视过程中可能将导致危险发生,需要降低其最小高度分辨率以满足对复杂多变的低空环境中无人机的航迹监视。
技术实现思路
1、本发明所要解决的技术问题是针对上述现有技术的不足,提供一种基于高度阶梯映射的ads-b无人机航迹监视方法,使用嵌入式设备和软件无线电设备实现无人机端的ads-b信号广播和地面端的ads-b信号接收,同时对无人机机载的ads-b out设备所广播的高度信息进行阶梯映射处理,将ads-b最小25英尺的分辨率降低至1英尺,使其满足对于低空无人机航迹的精准监视,同时不改变地面ads-b in的硬件设备组成,提高监视精度的同时节约成本。
2、为实现上述技术目的,本发明采取的技术方案为:
3、一种基于高度阶梯映射的ads-b无人机航迹监视方法,包括:
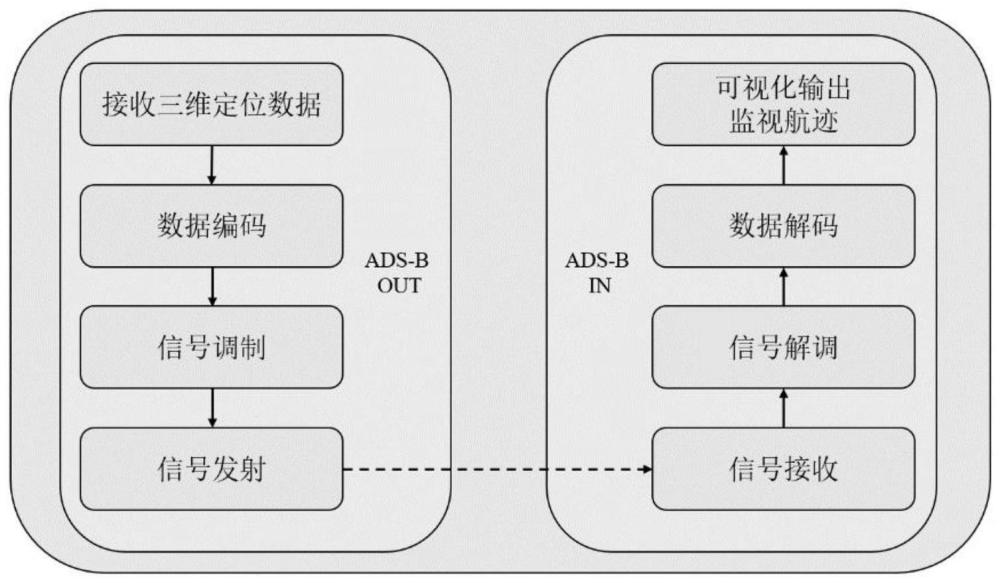
4、步骤1,空域中飞行的无人机获取其当前所处的三维坐标位置并对其进行高度信息阶梯映射后,与无人机的唯一标识号一并进行编码、调制,并周期性地向空域内进行ads-b消息的广播;
5、步骤2,地面的ads-b in接收端接收ads-b消息后进行解调、高度信息恢复,得到无人机的唯一标识号、解码后的高度信息、解码后的经纬度信息、恢复的高度信息,依据无人机的唯一标识号对解码后的高度信息进行航迹信息存储,并将解码后的经纬度信息与恢复的高度信息组合得到精确的无人机定位坐标信息,以进行可视化监视。
6、为优化上述技术方案,采取的具体措施还包括:
7、上述的步骤1所述无人机上机载gnss定位模块、嵌入式设备数据处理单元、软件无线电发射设备、发射天线;gnss定位模块与嵌入式设备数据处理单元通过gpio串口连接,嵌入式设备数据处理单元与软件无线电发射设备通过usb进行文件传输。
8、上述的步骤1包括:
9、步骤1-1,无人机通电后,其上机载的gnss定位模块通过卫星定位得到无人机当前所处的三维坐标位置;
10、步骤1-2,无人机机载的gnss定位模块通过gpio串口将步骤1-1得到的三维坐标位置传输至嵌入式设备数据处理单元之中对其进行高度信息阶梯映射后,对含有无人机的唯一标识号、含阶梯映射后高度信息的定位坐标信息,进行编码、调制并生成发送文件;
11、步骤1-3,将步骤1-2中生成的发送文件通过usb传输至软件无线电发射设备,使用发射天线周期性地向空域内进行ads-b消息的广播。
12、上述的步骤1-2按照ads-b 1090es数据链格式进行编码。
13、上述的步骤2所述地面的ads-b in接收端包括接收天线、软件无线电接收设备,以及处于同一局域网内的嵌入式设备数据处理单元、监视用计算机、存储设备和可视化设备;软件无线电接收设备与嵌入式设备数据处理单元通过usb传输信息。
14、上述的步骤2包括:
15、步骤2-1,地面的ads-b in接收端通过接收天线接收到步骤1中无人机广播的ads-b消息,通过软件无线电接收设备对信号进行解调;
16、步骤2-2,将步骤2-1解调后得到的数据通过usb传输到接收端嵌入式设备数据处理单元中进行解码和高度恢复,得到无人机信息,包括无人机的唯一标识号、解码后的高度信息和含恢复后高度信息、解码后的经纬度信息的精确的无人机定位坐标等信息;
17、步骤2-3,将步骤2-2中的嵌入式设备数据处理单元同时作为发布者和服务器,并将步骤2-2中得到的无人机信息发布在服务器上,等待客户端订阅;
18、步骤2-4,监视用计算机与步骤2-3中的嵌入式设备处于同一局域网内,连接后作为客户端对服务器上发布的无人机信息进行订阅,并按照无人机惟一标识号以时间顺序将解码后的高度信息发送至存储设备进行航迹信息存储,将精确的无人机定位坐标信息发送至可视化设备,对精确的无人机定位坐标信息进行可视化显示。
19、上述的步骤2-3使用mqtt协议将步骤2-2中得到的无人机信息发布在服务器上,所述步骤2-4使用mqtt协议对服务器上发布的无人机信息进行订阅。
20、上述的步骤2-3将步骤2-2中得到的无人机信息以固定的json格式发布在服务器上。
21、上述的高度信息阶梯映射方式为:将高度信息转换为以英尺为单位的高度信息,取整后得到gde;取以gde为编号的以25英尺为一个阶梯划分的阶梯的上界gdo,通过下式进行转换得到阶梯映射后高度信息,即发射高度信息gds为:
22、通过下式进行高度信息解码,得到解码后的高度信息,即接收高度信息gdr为:gdr=gds·25-1000;通过下式进行高度信息恢复,得到恢复后高度信息gds为:
23、本发明具有以下有益效果:
24、本发明利用软件无线电设备和嵌入式设备实现1090es数据链下无人机端ads-b消息的广播与地面端ads-b信号的接收,当1090mhz频谱拥塞时可以通过软件无线电设备灵活选取频率进行收发,避免对民航所使用的频谱产生干扰,同时该收发设备成本较低,易于搭建,实现简单。
25、本发明同时对无人机机载的ads-b out设备所广播的原始高度信息进行25英尺阶梯的映射,通过高度阶梯映射将原本要发射的高度信息替代为以原始高度信息为编号的阶梯上限高度,避免了发射端编码时对于高度信息进行取整时对于小数部分高度信息的丢失导致接收端无法恢复原始的精确高度信息,将ads-b高度信息的最小25英尺的分辨率降低到1英尺,使其满足对低空无人机的精准监视,同时高度阶梯映射只改变广播端,并且仅在接收端得到无人机高度信息的具体数据进行存储之后通过公式对其高度信息进行恢复,不改变现有的非软件无线电ads-b接收端设备的硬件组成,降低了高度阶梯映射机制纳入无人机监视技术的成本开销。
技术特征:
1.一种基于高度阶梯映射的ads-b无人机航迹监视方法,其特征在于,包括:
2.根据权利要求1所述的一种基于高度阶梯映射的ads-b无人机航迹监视方法,其特征在于,步骤1所述无人机上机载gnss定位模块、嵌入式设备数据处理单元、软件无线电发射设备、发射天线;gnss定位模块与嵌入式设备数据处理单元通过gpio串口连接,嵌入式设备数据处理单元与软件无线电发射设备通过usb进行文件传输。
3.根据权利要求2所述的一种基于高度阶梯映射的ads-b无人机航迹监视方法,其特征在于,所述步骤1包括:
4.根据权利要求3所述的一种基于高度阶梯映射的ads-b无人机航迹监视方法,其特征在于,所述步骤1-2按照ads-b 1090es数据链格式进行编码。
5.根据权利要求1所述的一种基于高度阶梯映射的ads-b无人机航迹监视方法,其特征在于,步骤2所述地面的ads-b in接收端包括接收天线、软件无线电接收设备,以及处于同一局域网内的嵌入式设备数据处理单元、监视用计算机、存储设备和可视化设备;软件无线电接收设备与嵌入式设备数据处理单元通过usb传输信息。
6.根据权利要求5所述的一种基于高度阶梯映射的ads-b无人机航迹监视方法,其特征在于,所述步骤2包括:
7.根据权利要求6所述的一种基于高度阶梯映射的ads-b无人机航迹监视方法,其特征在于,所述步骤2-3使用mqtt协议将步骤2-2中得到的无人机信息发布在服务器上,所述步骤2-4使用mqtt协议对服务器上发布的无人机信息进行订阅。
8.根据权利要求6所述的一种基于高度阶梯映射的ads-b无人机航迹监视方法,其特征在于,所述步骤2-3将步骤2-2中得到的无人机信息以固定的json格式发布在服务器上。
9.根据权利要求1所述的一种基于高度阶梯映射的ads-b无人机航迹监视方法,其特征在于,所述高度信息阶梯映射方式为:将高度信息转换为以英尺为单位的高度信息,取整后得到gde;取以gde为编号的以25英尺为一个阶梯划分的阶梯的上界gdo,通过下式进行转换得到阶梯映射后高度信息,即发射高度信息gds为:
10.根据权利要求1所述的一种基于高度阶梯映射的ads-b无人机航迹监视方法,其特征在于,通过下式进行高度信息解码,得到解码后的高度信息,即接收高度信息gdr为:gdr=gds·25-1000;通过下式进行高度信息恢复,得到恢复后高度信息gds为:
技术总结
本发明公开了一种基于高度阶梯映射的ADS‑B无人机航迹监视方法,包括:无人机获取其三维坐标位置并进行高度信息阶梯映射,与无人机的唯一标识号一并编码、调制并向空域内进行ADS‑B消息的广播;地面的ADS‑B IN接收端接收ADS‑B消息后进行解调、高度信息恢复,得到无人机的唯一标识号、解码后的高度信息、解码后的经纬度信息、恢复的高度信息,对解码后的高度信息进行航迹信息存储,并将解码后的经纬度信息与恢复的高度信息组合得到精确的无人机定位坐标信息,以进行可视化监视。本发明可灵活选取频率进行收发,避免对民航所使用的频谱产生干扰,可对低空无人机精准监视,降低硬件成本开销。
技术研发人员:董超,张仪凡,贾子晔,张磊,吴启晖
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!